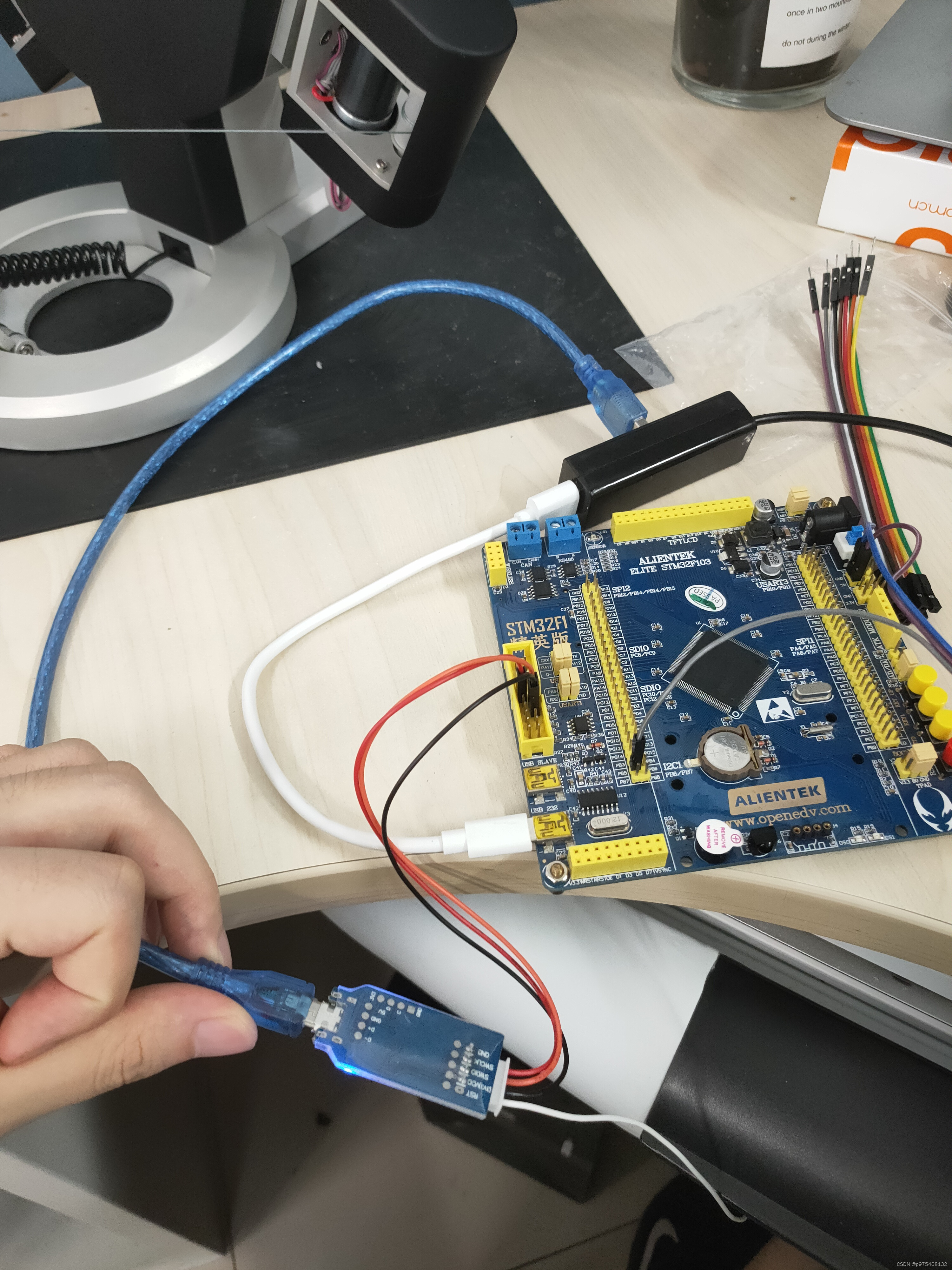
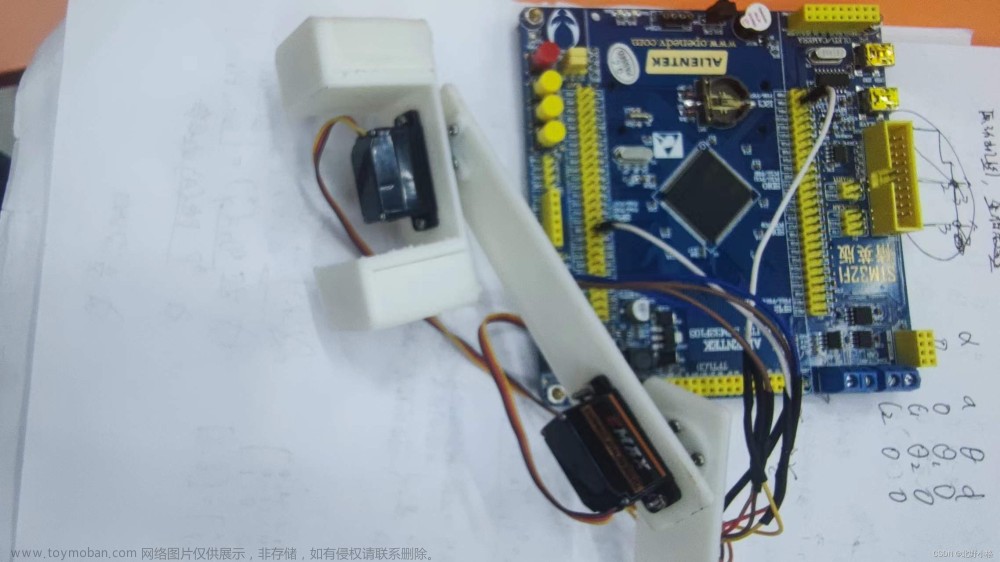
今日开始使用STM32F103 C8T6尝试做一个二轮平衡小车,从电机舵机控制开始,小车也是在三个小时的自主设计下框架结构与引脚安排都做好了。
本文主要贴代码,之前的文章都有原理,代码中相应初始化驱动部分也有注释~~
文章提供源码,解释以及工程下载,测试效果视频。
目录
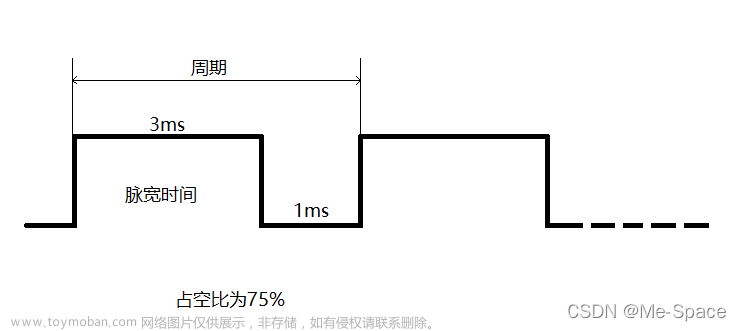
电机与舵机控制基础原理:
初始化TIM1为通用定时器:
初始化定时器TIM2为PWM输出控制电机:
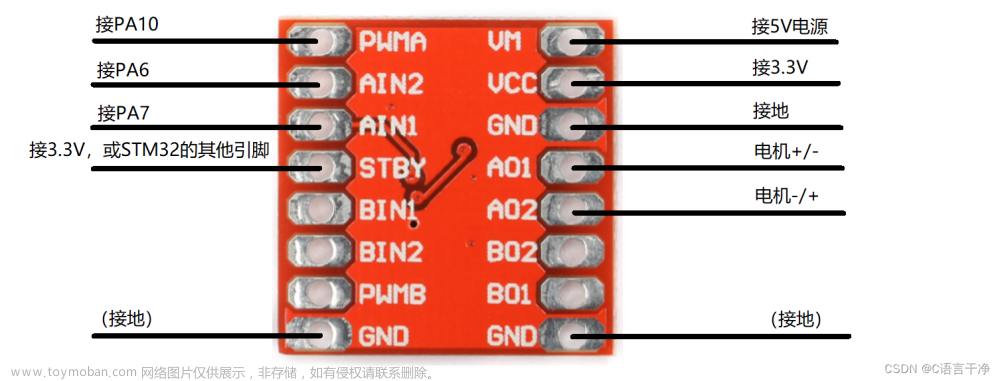
TB6612电机正反转控制引脚的初始化:
编写函数封装电机控制:
初始化定时器TIM4为舵机控制:
如此以后我们将这些动作加入主函数
测试效果:
测试工程下载:
电机与舵机控制基础原理:
原理方面其余文章都有讲到:
使用模块分别为:TB6612带稳压模块、MG996R舵机、JGB-520电机 。
STM32 F103C8T6学习笔记5:定时器输出不同占空比PWM驱动舵机旋转角度_NULL指向我的博客-CSDN博客
【MSP432电机驱动学习—上篇】TB6612带稳压电机驱动模块、MG310电机、霍尔编码器_tb6612fng电机驱动模块_NULL指向我的博客-CSDN博客
初始化TIM1为通用定时器:
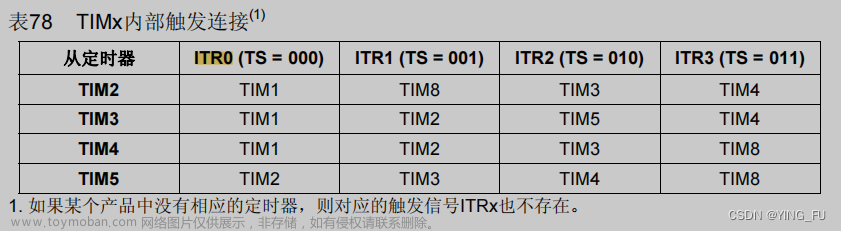
这里我选择了TIM1为通用定时器,因为它与定时器TIM2、3、4不同,
1、它是高级定时器,拥有带死区控制,但我们不需要,
2、它的部分初始化内容也与TIM2、3、4不同,因此这里初始化一下TIM1,巩固一下,
3、它占用的引脚有俩个是串口1的PA9\PA10,为了使得串口1能正常使用,因此不使用TIM1的通道,来控制舵机电机了
直接贴代码,这里初始化TIM1为通用定时器,都是周期1ms:
void TIM1_init(void)
{
// 定时器初始化结构体定义
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 定时器中断向量配置
NVIC_InitTypeDef NVIC_InitStructure;
// 使能定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
// 定时器时钟分频系数设置为72-1
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1;
// 定时器重载值设置为1000-1,即定时器溢出时间为1ms
TIM_TimeBaseStructure.TIM_Period = 1000 - 1;
// 定时器计数模式设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
// 定时器时钟分频因子设置为1
TIM_TimeBaseStructure.TIM_ClockDivision =TIM_CKD_DIV1;
//高级计数器需要,不需要用到的直接给0就好
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
// 应用定时器初始化配置
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// 清除定时器中断标志位
TIM_ClearFlag(TIM1, TIM_FLAG_Update);
// 使能定时器中断
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
// 中断优先级设置为最低
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;
// 中断子优先级设置为最低
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
// 使能中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// 应用中断配置
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;
NVIC_Init(&NVIC_InitStructure);
// 启动定时器1
TIM_Cmd(TIM1, ENABLE);
}
中断服务函数:
//通用定时器 定时器1 中断服务函数
void TIM1_UP_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
// if(++t==1000)
// {
// T++;t=0;
// printf("%d\r\n",T);
// }
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);//清出中断寄存器标志位,用于退出中断
}
}初始化定时器TIM2为PWM输出控制电机:
TIM2_init(); //定时器2初始化为电机PWM (频率 18K HZ,重载值 1000)
void TIM2_init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义初始化参数结构体
TIM_OCInitTypeDef TIM_OCInitStructure;//结构体变量需要赋值
GPIO_InitTypeDef GPIO_Initstructure; //引脚结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启TIM2的时钟
TIM_InternalClockConfig(TIM2);//开启定时器2的时钟源作为内部时钟源
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim,这里是不分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//TIM向上计数模式
TIM_TimeBaseInitStructure.TIM_Period=1000- 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler=4 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;;//定时器的倍率,如果定时1秒,参数是1,那就是1+1=2倍
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
// TIM_ClearFlag(TIM2,TIM_FLAG_Update);//中断清除
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//开启中断
TIM_OCStructInit(&TIM_OCInitStructure);//结构体赋初始值的函数
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//输出比较模式
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;//输出比较的极性
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//输出比较的使能
TIM_OCInitStructure.TIM_Pulse =0;//设置CCR的
TIM_OC1Init(TIM2,&TIM_OCInitStructure);//初始化TIM2_CH1
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);//使能预装载寄存器
TIM_OC2Init(TIM2,&TIM_OCInitStructure);//初始化TIM2_CH2
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);//使能预装载寄存器
// 用结构体初始化输出比较单元,不同函数不同的GPIO(A0)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//这里的注释部分是展示开启定时器相应通道管脚的重映射
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//开启AFIO的时钟
//GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);//部分重映射
//GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//关闭调试端口的复用
GPIO_Initstructure.GPIO_Mode= GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Initstructure.GPIO_Pin= GPIO_Pin_0;
GPIO_Initstructure.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_Initstructure);
GPIO_Initstructure.GPIO_Mode= GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Initstructure.GPIO_Pin= GPIO_Pin_1;
GPIO_Initstructure.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_Initstructure);
// GPIO_SetBits(GPIOA,GPIO_Pin_0);
TIM_Cmd(TIM2,ENABLE);
}
//void PWM_SetCompare1(uint16_t Compare1)
//{
// TIM_SetCompare1(TIM2,Compare1);//TIM2通道1,改变比较值CCRx,达到不同的占空比效果
//}
TB6612电机正反转控制引脚的初始化:
控制速度的PWM在上面已经初始化了,现在还需要初始化启用几个类似于点灯的,可以输出1和0逻辑的几个引脚,用于控制电机正反转:
//电机正反转控制引脚初始化:
void TB6612_init(void)
{
//初始化BIN2 (PB9) 和 BIN1 (PB10)
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure0;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB,ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure0.GPIO_Pin = GPIO_Pin_9;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure0.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure0.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(GPIOB, &GPIO_InitStructure0);
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB,ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure0.GPIO_Pin = GPIO_Pin_10;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure0.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure0.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(GPIOB, &GPIO_InitStructure0);
//初始化AIN2 (PA8) 和 AIN1 (PA11)
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA,ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure0.GPIO_Pin = GPIO_Pin_8;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure0.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure0.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(GPIOA, &GPIO_InitStructure0);
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA,ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure0.GPIO_Pin = GPIO_Pin_4;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure0.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure0.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(GPIOA, &GPIO_InitStructure0);
//初始化完先都置0,不转
GPIO_ResetBits(GPIOA,GPIO_Pin_8); //AIN1
GPIO_ResetBits(GPIOA,GPIO_Pin_4); //AIN2
GPIO_ResetBits(GPIOB,GPIO_Pin_10); //BIN1
GPIO_ResetBits(GPIOB,GPIO_Pin_9); //BIN2
} 编写函数封装电机控制:
//设置轮子速度,方向
//PWMA PWMB分别设置 左PWMA 右PWMB 电机
void set_wheels(uint16_t PWMA,uint16_t PWMB,uint16_t DIRA,uint16_t DIRB)
{
TIM_SetCompare1(TIM2,PWMB);//TIM2通道1,改变比较值CCRx,达到不同的占空比效果
TIM_SetCompare2(TIM2,PWMA);//TIM2通道1,改变比较值CCRx,达到不同的占空比效果
if(DIRA==0) //反转
{
GPIO_SetBits(GPIOA,GPIO_Pin_8); //AIN1
GPIO_ResetBits(GPIOA,GPIO_Pin_4);//AIN2
}
else if(DIRA==1) //正转
{
GPIO_SetBits(GPIOA,GPIO_Pin_4); //AIN1
GPIO_ResetBits(GPIOA,GPIO_Pin_8);//AIN2
}
if(DIRB==0) //反转
{
GPIO_SetBits(GPIOB,GPIO_Pin_10); //BIN1
GPIO_ResetBits(GPIOB,GPIO_Pin_9);//BIN2
}
else if(DIRB==1) //正转
{
GPIO_SetBits(GPIOB,GPIO_Pin_9); //BIN1
GPIO_ResetBits(GPIOB,GPIO_Pin_10);//BIN2
}
}
初始化定时器TIM4为舵机控制:
void TIM4_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// //开时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// //PWM输出管脚配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 3000;
TIM_TimeBaseStructure.TIM_Prescaler =71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
// //PWM模式配置
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC3Init(TIM4,&TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM4,TIM_OCPreload_Enable);
TIM_Cmd(TIM4,ENABLE);
//TIM_SetCompare3(TIM4,psc); //设置舵机占空比,控制舵机转动
}
// TIM_SetCompare3(TIM4,350); // 0度
// TIM_SetCompare3(TIM4,2600); //180度
// TIM_SetCompare3(TIM4,1475); //90度 如此以后我们将这些动作加入主函数
uint16_t T,t;
int main(void)
{
init_ALL(); //初始化所有函数
TIM_SetCompare3(TIM4,350); // 0度
delay_ms(5000);
set_wheels(555,555,1,1);
delay_ms(1000);
set_wheels(0,0,0,0);
delay_ms(1000);
set_wheels(555,555,0,0);
delay_ms(1000);
set_wheels(0,0,0,0);
while(1)
{
}
}
//初始化所有函数:
void init_ALL(void)
{
SysTick_Init(72); //初始化滴答计时器
Usart1_Init(115200); //串口1初始化
// i2c_GPIO_Config(); //IIC初始化
// Usart2_Init(115200); //串口2初始化
// Usart3_Init(115200); //串口3初始化
// OLED_Init(); //初始化OLED屏幕
// OLED_Clear(); //清空屏幕数据
// RTC_init(); //初始化RTC实时时钟
TIM1_init(); //定时器1初始化为通用定时器 (周期1ms)
TIM2_init(); //定时器2初始化为电机PWM (频率 18K HZ,重载值 1000)
TIM4_init(); //定时器4初始化为舵机PWM (频率333 hz ,重载值3000)
TB6612_init(); //电机正反转控制引脚初始化:
printf("HELLO"); //开机测试 串口1
// TIM_SetCompare3(TIM4,350); // 0度
// TIM_SetCompare3(TIM4,2600); //180度
// TIM_SetCompare3(TIM4,1475); //90度
}
测试效果:
今日就做到这吧,明日在接着做下面的东西......
二轮平衡小车:舵机与电机的基本控制与编码器信号捕获文章来源:https://www.toymoban.com/news/detail-689455.html
测试工程下载:
https://download.csdn.net/download/qq_64257614/88286409?spm=1001.2014.3001.5503文章来源地址https://www.toymoban.com/news/detail-689455.html
到了这里,关于二轮平衡小车1:舵机与电机的基本控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!