康耐视智能相机Insight-颜色区分统计
第一步.系统标定
安装设备时,难以确保安装后设备的 X/Y 方向所在平面与载物台平面平行,设备的 Y 方向也难以确保和运 动扫描方向一致。设备的安装误差会影响测量的绝对精度,可通过系统标定矫正安装误差,得到系统坐标系下的 点云数据,提高测量的绝对精度。
经过系统标定后,可以将倾斜的平面矫正为水平的平面,方便后续图像数据处理,比如通过高度阈值分割去
除背景噪声;
系统标定可分为直线标定、静态标定、动态标定:
直线标定只能矫正 X 方向(横向)的安装误差,提升 X 方向的测量绝对精度;
静态标定可以矫正 X 方向(横向)和 Z 方向(高度方向)的安装误差;提升 X 方向和 Z 方向的测量绝对精
度;
动态标定可以矫正 X 方向(横向)和 Z 方向(高度方向)以及 Y 方向(运动扫描方向)的安装误差;提升
X\Y\Z 三个方向上的测量绝对精度;该标定方式下,需标定块或设备其中一个处于运动状态,两者产生相对运动。
不同的标定方法适用于不同场景,一般场景推荐使用静态标定。
第二步.准备工作
在进行系统标定前,需完成以下相关准备工作:
动态标定须准备好对应型号轮廓仪的专用标定块;
静态标定则可选用标定块或使用一个有高度差的物 体进行标定;
直线标定可不使用标定块,可借助载物台或被测物表面轮廓进行直线标定;
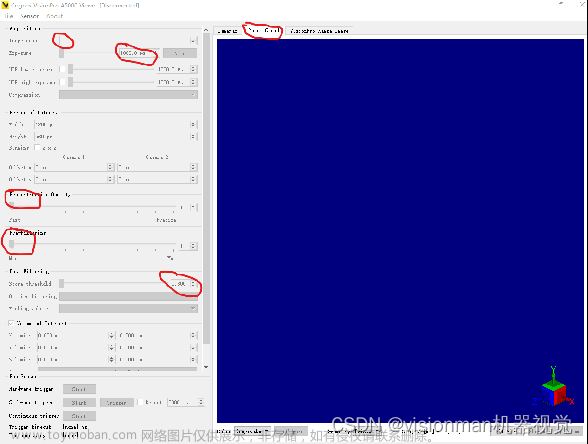
调整曝光时间\增益,使得原始图中标定块表面的轮廓线清晰可见;
调整算法参数(最大\最小线条宽度、二进制阈值、点选模式),使得提取的轮廓线中心点准确且稳定;
若进行动态标定,需框选 ROI 过滤去除标定块表面轮廓以外的轮廓线,防止影响算法标定;
若进行动态标定,建议扫描完整个标定块所采集的轮廓数量在 1000 行~3000 行左右;轮廓数量过少
会影响动态标定的精度;轮廓数量过多则动态标定算法耗时过长。
因此,当相机处于自由采集情况下,请根据轮廓仪和标定块的相对移动速度,大致计算扫描完工件所需
的时间,来推算并控制相机的采集帧率;若现场的平台运动速度较快,建议将速度降低下来,再进行动态标定。
若相机处于由外部编码器信号控制采集的情况下,请确认编码器分辨率(um\pulse)以及对编码器信
号进行合理的分频\倍频配置。
第三步.直线标定
完成准备工作后,进行直线标定界面。 第1步 使用左上角的 ROI 工具框选待矫正平面,点击“开始标定”,标定成功后将标定结果上传至相机。
第四步.静态标定
完成准备工作后,进行静态标定界面。 第1步 使用左上角的 ROI 工具框选两个具有高度差的平面,将已知的两平面实际物理高度差填入右侧标定物 高度,点击“开始标定”,标定成功后将标定结果上传至相机。
第五.动态标定文章来源:https://www.toymoban.com/news/detail-693537.html
完成准备工作后,进行动态标定界面。 第1步 根据标定块的实际尺寸,输入标定块的标定参数;
第2步 将标定块置于设备下方,使标定块前平面一侧的边界与激光线方向保持基本平行;标定块的前平面需朝着相机运动;在标定块进入激光时单击“开始标定”,等待激光线扫描完整个标定块后单击“停止标定”,标定成功后将标定结果上传至相机。

最后,不论是直线标定\静态标定\动态标定,系统标定结果上传相机后,均需要将坐标系类型由“传感器坐标系”切换至“系统坐标系”,系统标定结果才会生效。 文章来源地址https://www.toymoban.com/news/detail-693537.html
文章来源地址https://www.toymoban.com/news/detail-693537.html
到了这里,关于海康机器视觉3D轮廓仪如何进行系统标定?详细步骤如下的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!