模块简介
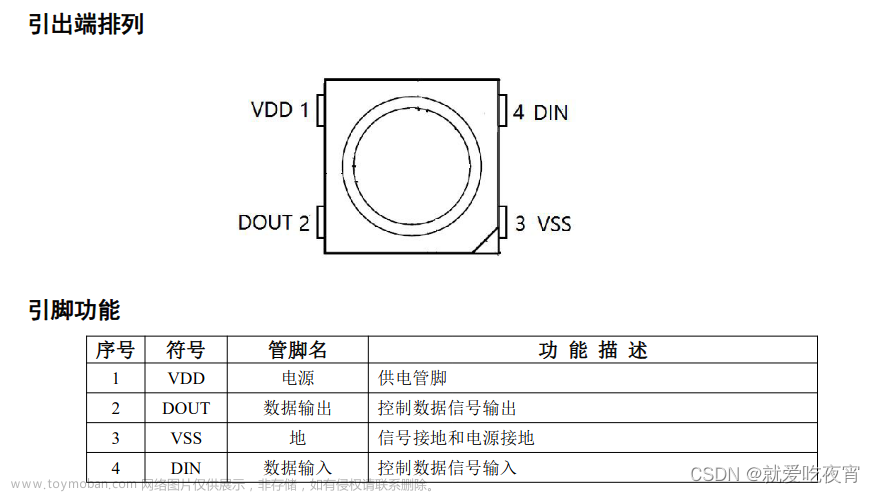
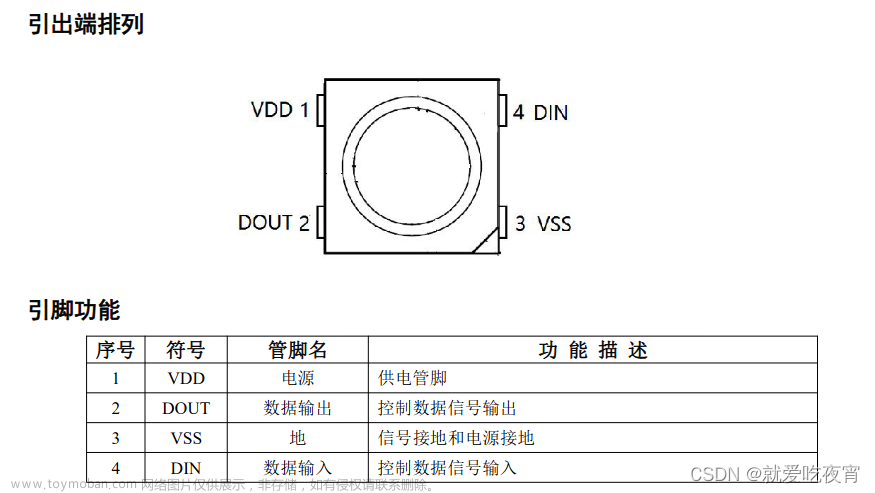
WS2812是一个集控制电路与发光电路于一体的智能外控LED光源。其外型与一个5050LED灯珠相同,每个元件即为一个像素点。像素点内部包含了智能数字接口数据锁存信号整形放大驱动电路,还包含有高精度的内部振荡器和12V高压可编程定电流控制部分,有效保证了像素点光的颜色高度一致。
数据协议采用单线归零码的通讯方式,像素点在上电复位以后,DIN端接受从控制器传输过来的数据,首先送过来的24bit数据被第一个像素点提取后,送到像素点内部的数据锁存器,剩余的数据经过内部整形处理电路整形放大后通过DO端口开始转发输出给下一个级联的像素点,每经过一个像素点的传输,信号减少24bit。像素点采用自动整形转发技术,使得该像素点的级联个数不受信号传送的限制,仅仅受限信号传输速度要求。
LED具有低电压驱动,环保节能,亮度高,散射角度大,一致性好,超低功率,超长寿命等优点。将控制电路集成于LED上面,电路变得更加简单,体积小,安装更加简便。
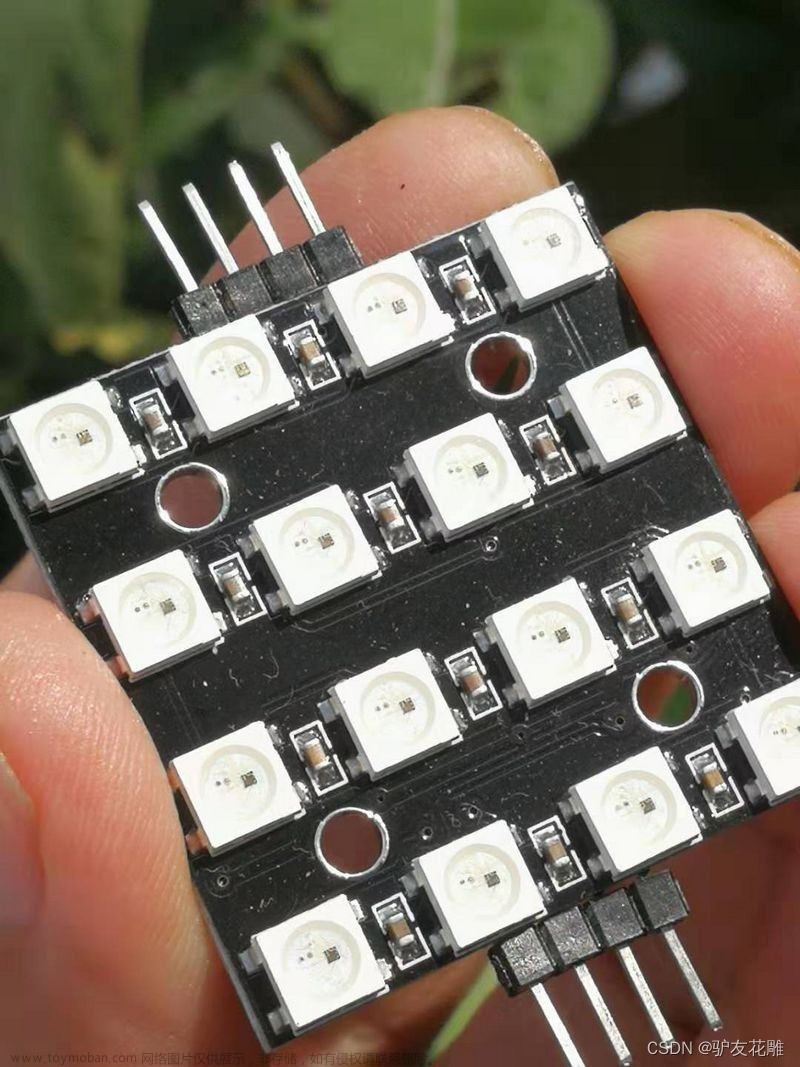
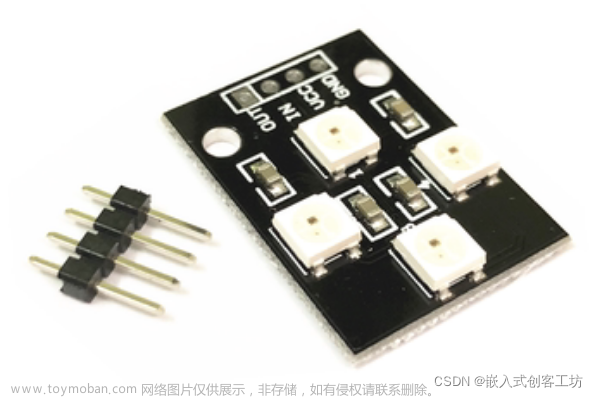
实物图:
主要应用领域包括:
- LED全彩发光字灯串,LED全彩模组, LED全彩软灯条硬灯条,LED护栏管。
- LED点光源,LED像素屏,LED异形屏,各种电子产品,电器设备跑马灯。
模块特点
- 控制电路与RGB芯片集成在一个5050封装的元器件中,构成一个完整的外控像素点。
- 内置信号整形电路,任何一个像素点收到信号后经过波形整形再输出,保证线路波形畸变不会累加。
- 内置上电复位和掉电复位电路
- 每个像素点的三基色颜色可实现256级亮度显示,完成16777216种颜色的全真色彩显示,扫描频率不低于
400Hz/s - 串行级联接口,能通过一根信号线完成数据的接收与解码
- 任意两点传传输距离在不超过5米时无需增加任何电路。
- 当刷新速率30帧/秒时,低速模式级联数不小于512点,高速模式不小于1024点
- 数据发送速度可达800Kbps
- 光的颜色高度一致,性价比高
机械尺寸
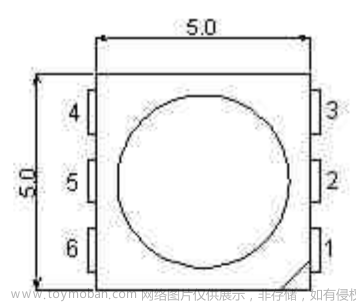
硬件引脚定义:
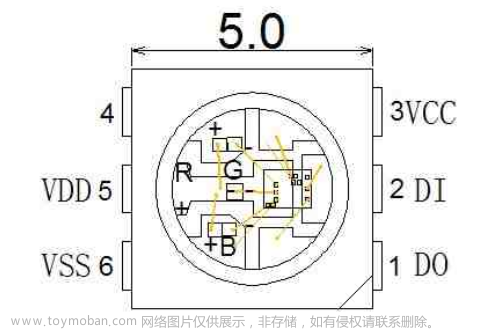
引出端功能
最大额定值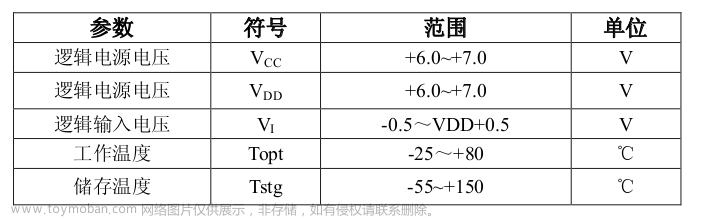
LED 特性参数
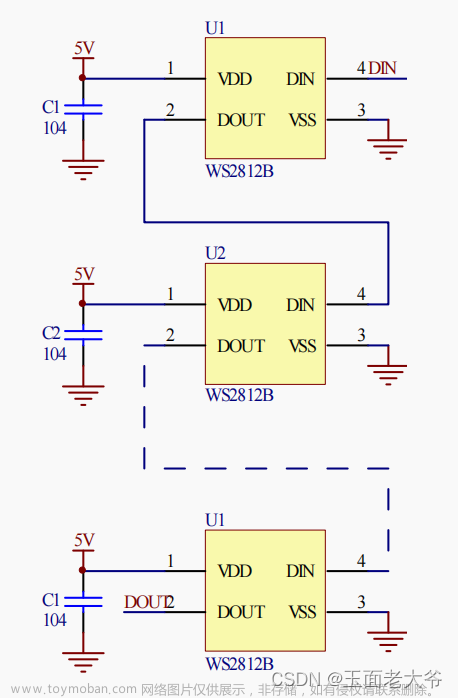
典型应用电路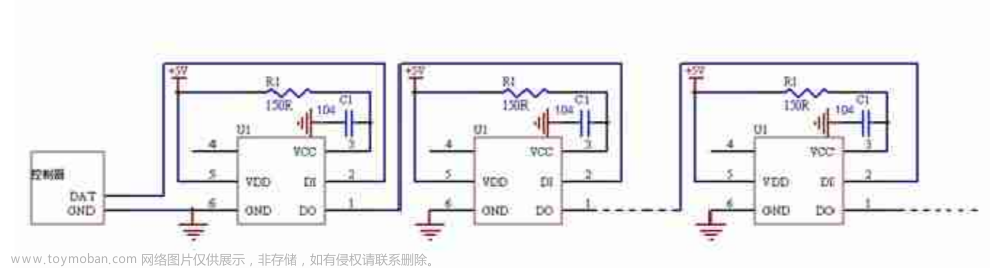
原理如如下:
一个WS2812B原理图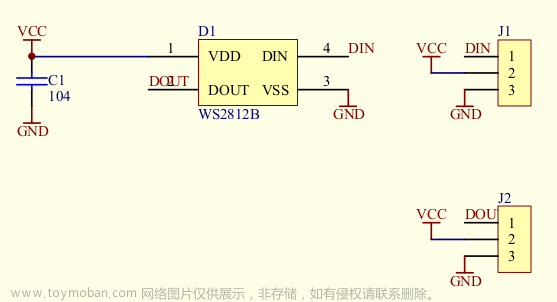
像上面的实物图,则是四个WS2812B组成的模块,那么原理图就是下面这样
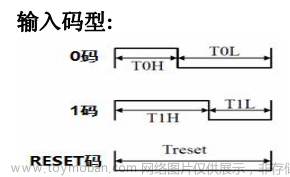
单线归零码通讯方式
数据传输时间 ( TH+TL=1.25 µs ±600n s )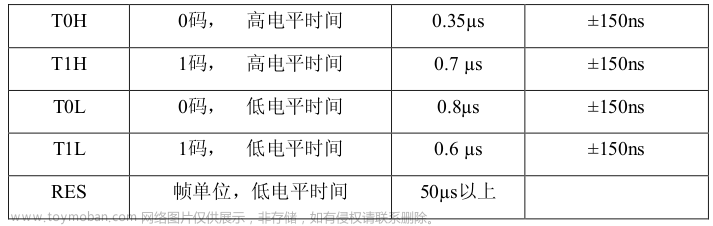
时序波形图
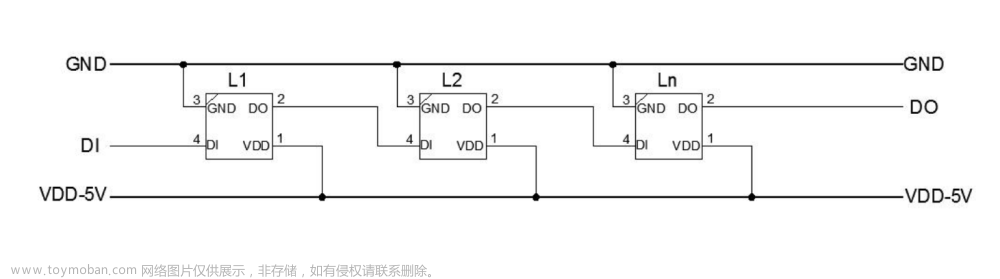
连接方法:
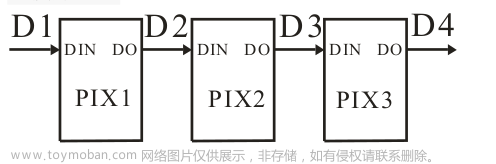
数据传输方法: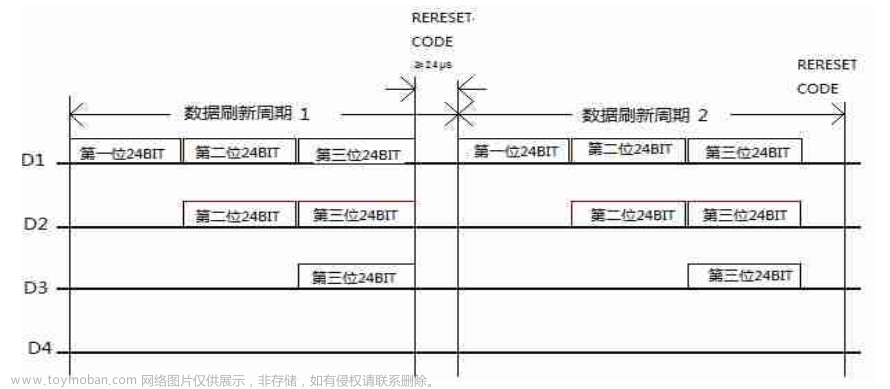
其中 D1 为 MCU 端发送的数据,D2、D3、D4 为级联电路自动整形转发的数据。
24bit 数据结构

高位先发,按照 GRB 的顺序发送数据
stm32 驱动
WS2812B编码所需的时间精度为ns级别,定时器中断不合适了;stm32的时钟周期在72mhz的系统时钟下为13.89ns,使用systemtick做delay也可以实现,但时间不会很精确,且需要考虑不同的指令周期对编码的影响,粗糙又繁琐。
WS2812B的0/1编码很像一个周期内不同占空比的波形,可以考虑PWM控制
void WS2812B_TIM_init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* GPIOA Configuration: TIM2 Channel 1 as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Compute the prescaler value */
//PrescalerValue = (uint16_t) (SystemCoreClock / 24000000) - 1;
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 89; // 800kHz
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
/* configure DMA */
/* DMA clock enable */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* DMA1 Channel6 Config */
DMA_DeInit(DMA1_Channel2);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&TIM2->CCR1; // physical address of Timer 3 CCR1
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)LED_BYTE_Buffer; // this is the buffer memory
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; // data shifted from memory to peripheral
DMA_InitStructure.DMA_BufferSize = 24;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // automatically increase buffer index
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // stop DMA feed after buffer size is reached
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel2, &DMA_InitStructure);
/* TIM3 CC1 DMA Request enable */
/* 只能使用通道1 TIMx_UP */
TIM_DMACmd(TIM2, TIM_DMA_Update, ENABLE);
}
void send_Data(uint32_t rgb)
{
uint8_t r = (rgb&0xff0000)>>16;
uint8_t g = (rgb&0x00ff00)>>8;
uint8_t b = (rgb&0xff);
for(uint16_t i=0;i<8;i++){
LED_BYTE_Buffer[i] = (0x80&g)>0?TIMING_ONE:TIMING_ZERO;g <<= 1;
}
for(uint16_t i=0;i<8;i++){
LED_BYTE_Buffer[8 + i] = (0x80&r)>0?TIMING_ONE:TIMING_ZERO;r <<= 1;
}
for(uint16_t i=0;i<8;i++){
LED_BYTE_Buffer[16 + i] = (0x80&b)>0?TIMING_ONE:TIMING_ZERO;b <<= 1;
}
DMA_SetCurrDataCounter(DMA1_Channel2, 24); // load number of bytes to be transferred
DMA_Cmd(DMA1_Channel2, ENABLE); // enable DMA channel 6
TIM_Cmd(TIM2, ENABLE); // enable Timer 3
while(!DMA_GetFlagStatus(DMA1_FLAG_TC2)) ; // wait until transfer complete
TIM_Cmd(TIM2, DISABLE); // disable Timer 3
DMA_Cmd(DMA1_Channel2, DISABLE); // disable DMA channel 6
DMA_ClearFlag(DMA1_FLAG_TC2); // clear DMA1 Channel 6 transfer complete flag
}
之后想让灯亮直接用send_Data函数就行。
发生的数据就是 GRB的亮度值。
例如 希望亮绿色 就是 0xff0000
白色就是 0xffffff
不亮就是 0x000000
如果几个灯串联在一起的话,则连续发,
send_Data(0xff0000)
send_Data(0x000000)
send_Data(0x000000)
send_Data(0x000000)
下次四个灯的指令需要间隔大于24us.文章来源:https://www.toymoban.com/news/detail-693851.html
例如这样调用
灯亮的结果:
太亮了。文章来源地址https://www.toymoban.com/news/detail-693851.html
到了这里,关于电子模块|外控集成 LED 光源 WS2812模块---硬件介绍和stm32驱动的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!