来自open3d在GitHub上的这个issue文章来源:https://www.toymoban.com/news/detail-695338.html
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(pcd)
vis.update_geometry(pcd)
vis.poll_events()
vis.update_renderer()
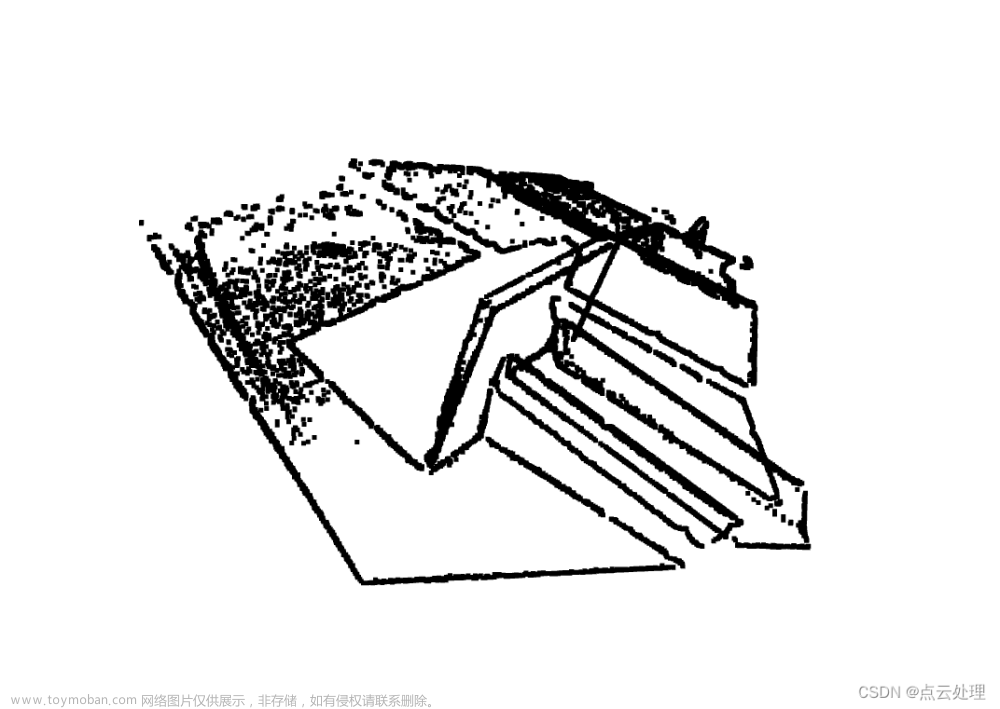
vis.capture_screen_image(path)
vis.destroy_window()其中要用到的pcd的产生可以参考这篇帖子中用到的方式文章来源地址https://www.toymoban.com/news/detail-695338.html
import open3d as o3d
import numpy as np
np_pcd = np.random.random((1000,3))
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(np_pcd)到了这里,关于如何利用open3d对点云进行可视化并保存可视化结果的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!