数学表达
一阶多智能体的运动学方程可以描述为
x
˙
i
(
t
)
=
u
i
(
t
)
,
i
∈
{
1
,
2
,
3
,
…
,
N
}
\dot x_i(t) = u_i(t),i\in\{1,2,3,\dots,N\}
x˙i(t)=ui(t),i∈{1,2,3,…,N}
其中
x
i
(
t
)
x_i(t)
xi(t)为状态,
u
i
(
t
)
u_i(t)
ui(t)为控制量,最终期望的结果为
lim
t
→
T
∣
x
i
(
t
)
−
x
j
(
t
)
∣
=
0
\lim_{t\to T} |x_i(t) - x_j(t)| = 0
t→Tlim∣xi(t)−xj(t)∣=0
∣ x i ( t ) − x j ( t ) ∣ = 0 , ∀ t ≥ T |x_i(t)-x_j(t)| = 0, \forall t \ge T ∣xi(t)−xj(t)∣=0,∀t≥T
其中上式中第一个等式表示在时间趋近于 T T T的时候,智能体的状态趋于一致。第二个等式表示在时间超过 T T T的时候智能体的时间已经保持一致。
将一阶多智能体的一致性算法表示为
u
i
(
t
)
=
−
∑
j
=
1
N
a
i
j
(
x
i
(
t
)
−
x
j
(
t
)
)
u_i(t) = - \sum_{j=1}^{N}a_{ij}(x_i(t) - x_j(t))
ui(t)=−j=1∑Naij(xi(t)−xj(t))
这里有一个小技巧,如果用矩阵的形式表示的话,那么直接使用拉普拉斯矩阵表示
u
(
t
)
=
−
x
(
t
)
⋅
L
u(t) = - x(t) \cdot L
u(t)=−x(t)⋅L
仿真
设置智能体的初始状态为
x
=
[
1
2
3
4
]
x = \begin{bmatrix} 1& 2& 3& 4 \end{bmatrix}
x=[1234]
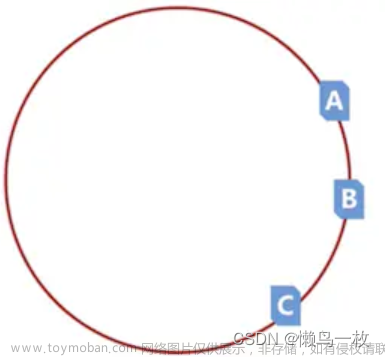
智能体的连接为
智能体1 --- 智能体2
| |
| |
智能体4 --- 智能体3
那么拉普拉斯矩阵为
L
=
[
2
−
1
0
−
1
−
1
2
−
1
0
0
−
1
2
−
1
−
1
0
−
1
2
]
L = \begin{bmatrix} 2 & -1 & 0 & -1\\ -1 & 2 & -1 & 0\\ 0 & -1 & 2 & -1\\ -1 & 0 & -1 & 2\\ \end{bmatrix}
L=
2−10−1−12−100−12−1−10−12
仿真代码为(matlab)
clc;clear;close
x = [1 2 3 4];
u = [];
A = [0 1 0 1;
1 0 1 0;
0 1 0 1;
1 0 1 0;];
B = [2 0 0 0;
0 2 0 0;
0 0 2 0;
0 0 0 2;];
L = B - A;
dt = 0.001;
k = 3;
lambda = 2;
mu = 0.1;
for i = 1:4000
u1 = -x(end,:) * L;
x1 = x(end,:) + u1 * dt;
u = [u;u1];
x = [x;x1];
end
画出控制量的曲线以及状态量曲线
Fig1 = figure(1);
plot(0.001:0.001:4.001,x,'LineWidth', 1.5);
xlabel('t');
ylabel('x');
legend('agent1','agent2','agent3','agent4');
print(Fig1,'x','-dpng','-r600')
Fig2 = figure(2);
plot(0.001:0.001:4.000,u,'LineWidth', 1.5);
xlabel('t');
ylabel('u');
legend('agent1','agent2','agent3','agent4');
print(Fig2,'u','-dpng','-r600')
状态变量的随时间变化图为
 文章来源:https://www.toymoban.com/news/detail-695530.html
文章来源:https://www.toymoban.com/news/detail-695530.html
控制量随时间变化图为
可以看到,最终四个智能体的状态全部归于一致。文章来源地址https://www.toymoban.com/news/detail-695530.html
到了这里,关于一阶多智能体的平均一致性的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!