Lens Calibration(镜头标定)
使用Metashape进行自动相机标定是可能的。Metashape使用LCD显示屏作为标定目标(可选:使用打印的棋盘格图案,但需保证它是平坦的且单元格是正方形)。
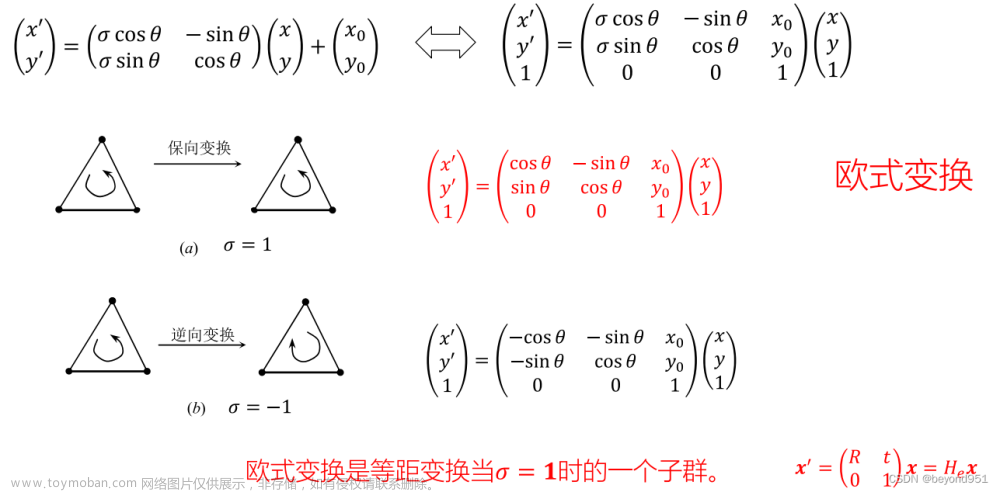
相机标定步骤支持全相机标定矩阵的估计,包含非线性的畸变参数。相机模型的细节请参照附录D——相机模型板块。
注意:在通用的工作流程中,相机标定步骤可以跳过。因为Metashape会在图像定向过程中进行相机自标定。但是,如果定向结果不稳定,例如,由于影像之间缺乏连接点,额外进行单独的相机标定步骤也许是有用的。
以下的相机标定参数可以被估计:
- f 像素单位的相机焦距(注意不是透镜焦距)
- cx cy 像主点坐标,即相机主光轴与传感器平面的交点在图像坐标系下的像素坐标。
- b1 b2 仿射和偏斜(非正交)变换系数【affinity and skew ( non orthogonality )transformation coeffcients 】
- k1 k2 k3 k4 径向畸变参数
- p1 p2 切向畸变参数
(一般项目考虑fx fy cx cy k1 k2 k3 p1 p2足够了)

在点开Metashape的相机标定工具之前,先在Metashape加载你拍摄相机标定板的一组影像。
为了拍摄标定板的影像,可参照以下步骤:
- 菜单栏Tools的Lens子菜单,选择Show ChessBoard,打开标定板图案
- 使用鼠标滚轮放大或缩小标定板图案。调整缩放直到每块屏幕的方格数量超过10
- 对着标定板拍摄一系列的影像,角度应有细微的差别。每次定焦拍摄的最小影像至少为3
- 在标定(校准)变焦镜头时,如果不小心改变了镜头焦距,需要重复上一步。
- 点击标定图案的任一处或按下返回按钮回到主程序。
- 将捕捉到的照片上传到计算机。
在拍摄标定图案的照片时,尽量遵循以下指导原则:
- 确保焦距在整个拍摄过程中保持恒定(如果使用变焦镜头)
- 避免照片的眩光。如有需要,请把光源移开
- 照片的整个图幅最好全被标定图案覆盖。如果需要,将摄像机移近液晶屏幕
加载标定图案的照片:
- 在工作空间面板新建chunk(区块)
- 菜单栏添加影像
- 加载好的影像显示在Photos面板
注意:
- 双击“照片”窗格中的缩略图,打开任何照片。为了获得良好的校准,照片应该相当清晰,与清晰的细胞之间的边界。
- 不需要的照片,可以右键随时轻松删除。
- 在校正鱼眼镜头前,在“工具”菜单的“相机校正”对话框中设置相应的相机类型。请参阅相机校准部分中有关其他相机校准设置的信息
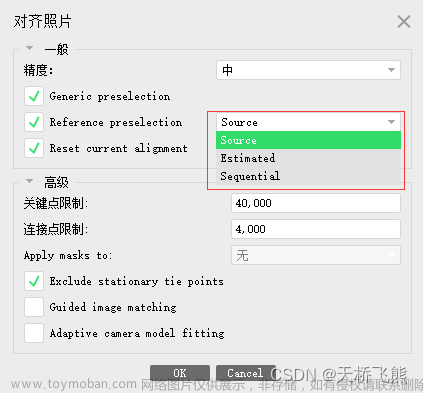
标定相机镜头:
- 从Tools主菜单下的Lens子菜单选择Calibrate Lens
- 在Calibrate Lens选择想要的标定参数
- 将出现进度对话框,显示当前处理状态。要取消处理,请单击“取消”按钮。
- 标定结果将显示在“相机标定…”的“Adjusted”选项卡上对话框。可以使用调整后选项卡上的保存按钮将调整后的值保存到文件中。如果使用相同的相机和镜头,保存的镜头标定数据稍后可以在另一个区块或项目中使用
注意:文章来源:https://www.toymoban.com/news/detail-696474.html
- 保存镜头的校准参数后,可以在单独的块中处理由同一相机和镜头捕获的实际图像集。为了防止校准数据在“Aligh Photo”过程中被细化,应在“初始”选项卡上选中包含要处理的数据的块的“固定标定”框。在这种情况下,初始标定值在对齐照片过程中不会改变。
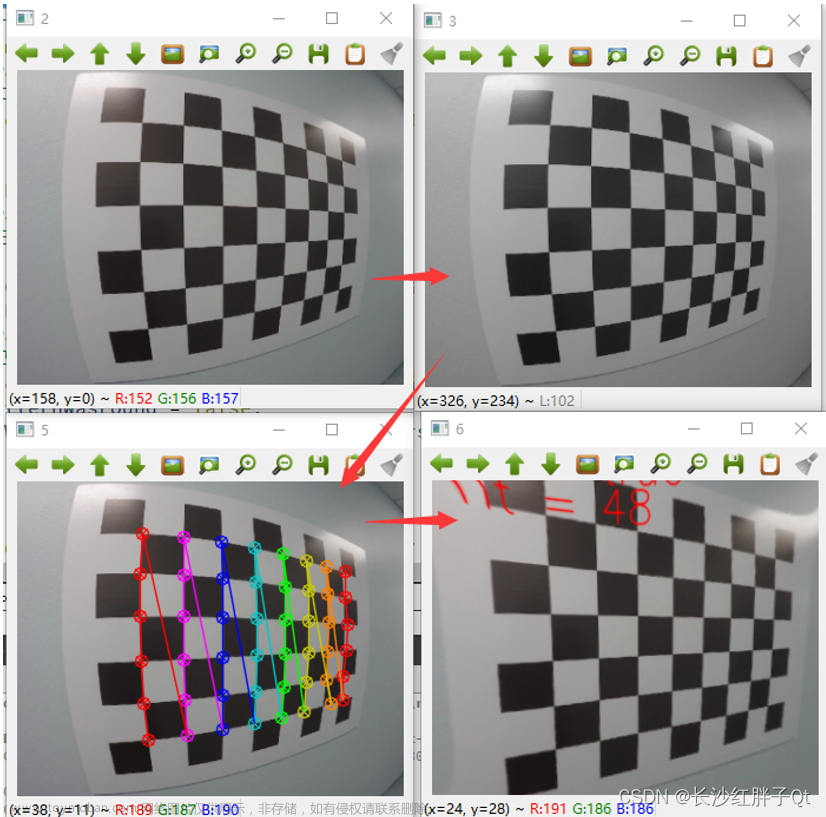
标定完成后,将显示以下信息: 每张照片上都会显示检测到的棋盘角点(可以通过在“照片”窗格中双击其名称来打开该照片)。当大多数角点被正确检测到时,效果会更好。对于每个检测到的角点,还显示检测到的角点位置和根据计算的校准估计的位置之间的重投影误差。误差缩放 x20 倍以供显示文章来源地址https://www.toymoban.com/news/detail-696474.html
到了这里,关于Agisoft Metashape相机标定笔记的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




![【笔记&问题解决】激光雷达和相机外部参数标定全流程(livox_camera_calib加载数据问题解决 [#85 Issue] & PCL无法创建KDTree问题解决 [#19 Issue])](https://imgs.yssmx.com/Uploads/2024/02/761651-1.png)