目录
1. 让小车动起来
2. 串口控制小车方向
3. 如何进行小车PWM调速
4. PWM方式实现小车转向
1. 让小车动起来
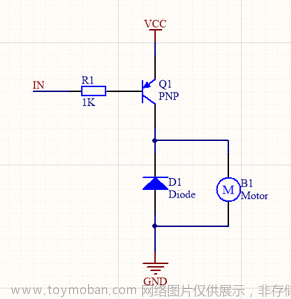
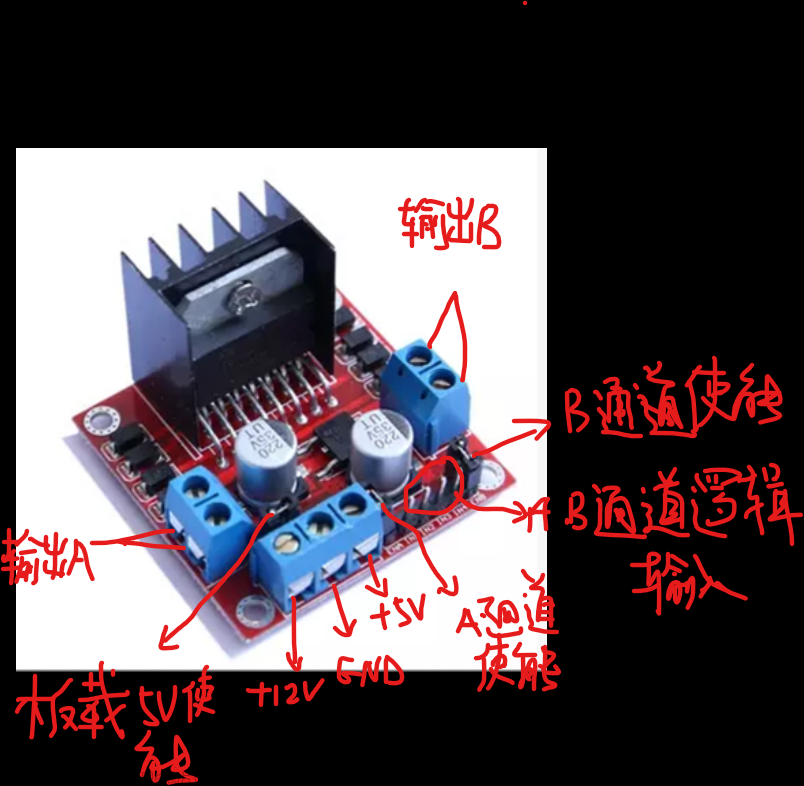
电机模块开发
L9110s概述
接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试
IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转;
IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转;
IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转;
IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;

核心代码:文章来源地址https://www.toymoban.com/news/detail-696940.html
#include "reg52.h"
#include "intrins.h"
sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void goForward()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 1;
}
void goLeft()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 1;
}
void goRight()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 0;
}
void goBack()
{
LeftCon1A = 1;
LeftCon1B = 0;
RightCon1A = 1;
RightCon1B = 0;
}
void main()
{
while(1){
goForward();
Delay1000ms();
Delay1000ms();
goBack();
Delay1000ms();
Delay1000ms();
goLeft();
Delay1000ms();
Delay1000ms();
goRight();
Delay1000ms();
Delay1000ms();
}
}
2. 串口控制小车方向
串口介绍:
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成 本,特别适用于远距离通信,但传送速度较慢
- 串口分文件编程进行代码整合——通过现象来改代码
- 接入蓝牙模块,通过蓝牙控制小车
- 添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不 能实现),就能实现前进按键按下后小车一直往前走的功能
3. 如何进行小车PWM调速
原理: 全速前进是LeftCon1A = 0; LeftCon1B = 1;完全停止是LeftCon1A = 0;LeftCon1B = 0;那么单位时 间内,比如20ms, 有15ms是全速前进,5ms是完全停止, 速度就会比5ms全速前进,15ms完全停止获得的功率多,相应的速度更快!
开发:借用PWM的舵机控制代码
核心代码:
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "time.h"
extern char speed;
void main()
{
Time0Init();
//UartInit();
while(1){
speed = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500us
Delay1000ms();
Delay1000ms();
speed = 20;
Delay1000ms();
Delay1000ms();
speed = 40;
Delay1000ms();
Delay1000ms();
}
}
//time.c
#include "motor.h"
#include "reg52.h"
char speed;
char cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cnt < speed){
//前进
goForward();
}else{
//停止
stop();
}
if(cnt == 40){//爆表40次,经过了20ms
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}4. PWM方式实现小车转向
原理: 左轮定时器0调速,右轮定时器1调速,那么左转就是右轮速度大于左轮!文章来源:https://www.toymoban.com/news/detail-696940.html
核心代码:
#include "motor.h"
#include "reg52.h"
char speedLeft;
char cntLeft = 0;
char speedRight;
char cntRight = 0;
void Time1Init()
{
//1. 配置定时器1工作模式位16位计时
TMOD &= 0x0F;
TMOD |= 0x1 << 4;
//2. 给初值,定一个0.5出来
TL1=0x33;
TH1=0xFE;
//3. 开始计时
TR1 = 1;
TF1 = 0;
//4. 打开定时器1中断
ET1 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time1Handler() interrupt 3
{
cntRight++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL1=0x33;
TH1=0xFE;
//控制PWM波
if(cntRight < speedRight){
//右前进
goForwardRight();
}else{
//停止
stopRight();
}
if(cntRight == 40){//爆表40次,经过了20ms
cntRight = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}
void Time0Handler() interrupt 1
{
cntLeft++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cntLeft < speedLeft){
//左前进
goForwardLeft();
}else{
//停止
stopLeft();
}
if(cntLeft == 40){//爆表40次,经过了20ms
cntLeft = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}到了这里,关于智能小车—PWM方式实现小车调速和转向的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!