1.计数器的用途
直流有刷的电机,后面两个一正一负的电接上,电机就可以转
到底是转子个几个圈呢?
我们就可以在背后加装这么一个码盘,我们假设这里是有60个这个光电的一个孔对吧
那我们转一圈是不是就可以一个轴上输出60个这样的脉冲,有遮挡就输出1,无遮挡输出0,
两路交替,如果说这圈有60个脉冲,60个高低电平(总共几个脉冲除60就是转的圈数)
本节利用开关,模拟计数器的功能。
编码器也可以实现脉冲输出,输出波形:方波
流过了多少液体,中间有个比例变化。一高一低算一个脉冲。
只要输出信号带这种高低电平变化的,想要计算个数的就可以用计数器的功能
2.计数器的配置

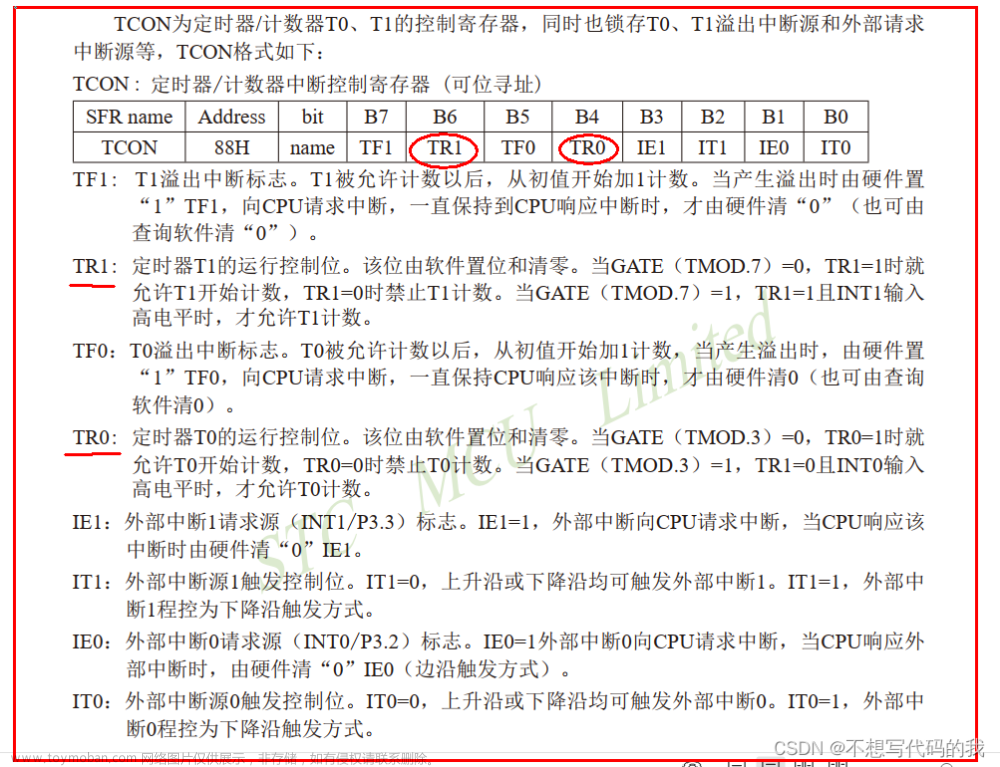
当GATE=O(TMOD.7)时,如TR1=1,则定时器计数。GATE=1时,允许由外部输入INT1控制定时器1,
这样可实现脉宽测量。TR1为TCON寄存器内的控制位,TCON寄存器各位的具体功能描述见上节TCON寄存器的介绍。
当c/T=0时,多路开关连接到系统时钟的分频输出,Tl对内部系统时钟计数,T1工作在定时方式
当C/T=1时,多路开关连接到外部脉冲输入P3.5/T1,即 T1工作在计数方式。
STC单片机的定时器1有两种计数速率:一种是12T模式,每12个时钟加1,与传统8051单片机相同;另外一种是1T模式,每个时钟加1,速度是传统8051单片机的12倍。T1的速率由特殊功能寄存器AUXR中的T1x12决定,如果T1x12=0,T1则工作在12T模式;如果T1x12=1,T1则工作在1T模式定时器1有两个隐藏的寄存器RL_TH1和RL_TL1。RL_TH1与TH1共有同一个地址,RL_TL1与TL1共有同一个地址。当TRI=0即定时器/计数器Ⅰ被禁止工作时,对TLl写入的内容会同时写入RL_TLl,对
TH1写入的内容也会同时写入RL_TH1。当TR1=1即定时器/计数器Ⅰ被允许工作时,对TLl写入内容,实际上不是写入当前寄存器TL1中,而是写入隐藏的寄存器RL_TL1中,对THl 写入内容,实际上也不是写入当前寄存器TH1中,而是写入隐藏的寄存器RL_THl,这样可以巧妙地实现16位重装载定时器。当读THl和TL1的内容时,所读的内容就是TH1和TL1的内容,而不是RL_TH1和RL_TLl的内容。
当定时器1工作在模式1(TMOD[5:4][M1.MO]=00B)时,[THl,TL1l]的溢出不仅置位TF1,而且会自动将[RL_TH1,RL_TL1]的内容重新装入[TH1,TL1]。
当T1CLKO/INT_CLKO.1=1时,P3.4/TO管脚配置为定时器1的时钟输出T1CLKO。输出时钟频率为T1溢出率/2。
如果C/T=0,定时器/计数器T1对内部系统时钟计数,则:
T1工作在1T模式(AUXR.6/T1x12=1)时的输出时钟频率=(SYsclk)(TM1PS+1)(65536-[RL_TH1,RL_TL1])/2T1工作在12T模式(AUXR.6/TIx12=0)时的输出时钟频率=(SYSclk)(TM1PS+1)/12/(65536-[RL_TH1,RL_TLI])/2如果C/T=1,定时器/计数器T1是对外部脉冲输入(P3.5/Tl)计数,则:输出时钟频率=(Tl_Pin_CLK)/(65536-[RL_TH1,RL_TL1])/2
Tl_C/T:Tl_C/T位写1,控制定时器1用作定时器或计数器,清0则用作定时器(对内部系统时钟进行计数),置1用作计数器(对引脚T1/P3.5外部脉冲进行计数)。
Tl_GATE:控制定时器1,置1时只有在INT1脚为高及TRI控制位置1时才可打开定时器/计数器1。此处仅需要TR1计数,故可以将Tl_GATE置0.
官方例程


设置TMOD = 0X40 =0100 0000 ,即Tl_C/T置1,用作计数。16位自动重载。
TL1 = 0xff; //1111 1111,65535,相当于再来1个脉冲,就可以进一下中断,给引脚取反。每来一个脉冲,取反一次。
TH1 = 0xff;
开始
用按钮模拟,松开是高电平,然后不断的按下松开按下松开。
选用例程作为参考:
需要打开内部4K的上拉电阻打开,用到端口上拉电阻控制寄存器(PxPU):

STC-ISP软件中有这个IO口的一个配置工具:
利用上一节的例程,改名为8.计数器,可以用T1来实现。
将void Timer0_Isr(void) interrupt 1屏蔽,调用T0中断屏蔽,本节不需要。
按手册上的例程顺序编写。
Tips:编译时提示错误FILE DOES NOT EXIST:

C251 FATAL-ERROR -
ACTION: OPENING INPUT-FILE
FILE: \STC32\8.计势鱘COMM\stc32g.h
ERROR: FILE DOES NOT EXIST
C251 TERMINATED.
这里涉及“附录I关于Keil软件中 0xFD问题的说明”。
Keil项目路径名的字符中也不能含有带OxFD编码的汉字,否则Keil软件会无法正确编译此项目。故需要修改本工程的目录名:
改为英文名:8.Count_T1,编译正常通过,按键led循环亮灭。
课后可以试验一下通过改变H1跟TL1的值,实现2下亮灭。
这个值的确定可以使用STC-ISP中的I/O口配置工具,高级配置,设置条件:
得到设置代码: P3PU = 0x20;
3.计数器的应用
见2017年全国大学生电子设计竞赛试题 ——直流电动机测速装置(O题),题目如下
解题思路如下:
M法测速:又叫做频率测量法。这种方法是在一个固定的定时时间内(以秒为单位),统计这段时间的编码器脉冲数,计算速度值。设编码器单圈总脉冲数为C, 时间T0内,统计到的编码器脉冲数为M0,则转速n的计算公式为:
首先我们定义一个变量叫u16 Count_T1 = 0;初值设置为0。
改写中断处理函数:void Timer0_Isr(void) interrupt 1:
void Timer0_Isr(void) interrupt 1 //1ms进来执行一次,无需其他延时,重复赋值
{
TimCount++; //计算2000次=2s,可以一直运行
if(TimCount>= 2000)
{
TimCount = 0;
Count_T1 = (TH1 * 256) + TL1; //单位:转/s,
TH1 = 0;
TL1 = 0;
Show_Tab[4] = TimCount/1000%10;
Show_Tab[5] = TimCount/100%10+10;
Show_Tab[6] = TimCount/10%10;
Show_Tab[7] = TimCount/1%10; //取10位
}
SEG_Fre(); //计算得到结果后,数码管刷新
}
本例完整代码:
#include "COMM/stc.h" //调用头文件
#include "COMM/usb.h"
#define KEY1 P32 //定义一个按键 引脚选择P32
#define KEY2 P33 //定义一个按键 引脚选择P33
#define BEEP P54 //定义一个按键 引脚选择P54
#define SEG_Delay 1 //延时多少ms
#define MAIN_Fosc 24000000UL //定义主时钟
char *USER_DEVICEDESC = NULL;
char *USER_PRODUCTDESC = NULL;
char *USER_STCISPCMD = "@STCISP#";
u8 SEG_Tab[21] = { 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, 0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0xff}; //0-9段码,0-9带小数点
u8 COM_Tab[8] = { 0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe }; //0-7的位码数组
u8 Show_Tab[8] = {20,20,20,20,0,0,0,0};
u32 TimCount = 0; //计数单位1ms
bit RUN_State = 0; //开始运行/结束运行
u8 num = 0;
u16 Count_T1 = 0;
void sys_init(); //函数声明
void delay_ms(u16 ms); //unsigned int
void SEG_Fre( void )
{
//位码选择第一位,段码选择0
P7 = COM_Tab[num]; //位码的选择
P6 = SEG_Tab[Show_Tab[num]];//需要显示的数字的内码 赋给 P6 NUM =0 -> Show_Tab[num]] = 1 -> p6 = oxF9
//delay_ms(SEG_Delay);
num++;
if( num >7 )
num = 0;
}
//========================================================================
// 函数名称: Timer0_Init
// 函数功能: 定时器0初始化
// 入口参数: 无
// 函数返回: 无
// 当前版本: VER1.0
// 修改日期: 2023
// 当前作者:
// 其他备注:
//========================================================================
void Timer0_Init(void) //1毫秒@24.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x30; //设置定时初始值
TH0 = 0xF8; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1; //使能定时器0中断
}
void main() //程序开始运行的入口
{
sys_init(); //USB功能+IO口初始化
usb_init(); //usb库初始化
TMOD = 0x50; //设置计数器模式
TL1 = 0x00; //设置计数初始值
TH1 = 0x00; //设置计数初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
P3PU = 0x20; //打开内部上拉4.1K
Timer0_Init();
EA = 1; //CPU开放中断,打开总中断。
while(1) //死循环
{
if( DeviceState != DEVSTATE_CONFIGURED ) //
continue;
if( bUsbOutReady )
{
usb_OUT_done();
}
}
}
void Timer0_Isr(void) interrupt 1
{
TimCount++; //每隔1ms+1 // 计数到2000 = 2s
if( TimCount>=2000 ) //2秒定时时间到了
{
TimCount = 0;
Count_T1 = (TH1 *256 )+ TL1; // 转/2s 转/min
TH1 = 0;
TL1 = 0;
Show_Tab[4] = Count_T1/1000%10;
Show_Tab[5] = Count_T1/100%10;
Show_Tab[6] = Count_T1/10%10;
Show_Tab[7] = Count_T1/1%10; //取10位
}
SEG_Fre(); //数码管刷新的
}
void Timer1_Isr(void) interrupt 3
{
}
/*
11111110 0XFE
11111101 0XFD
11111011 0XFB
11110111 0XF7
11101111 0XEF
11011111 0XDF
10111111 0XBF
01111111 0X7F
*/
void sys_init() //函数定义
{
WTST = 0; //设置程序指令延时参数,赋值为0可将CPU执行指令的速度设置为最快
EAXFR = 1; //扩展寄存器(XFR)访问使能
CKCON = 0; //提高访问XRAM速度
P0M1 = 0x00; P0M0 = 0x00; //设置为准双向口
P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口
P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口
P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口
P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口
P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口
P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口
P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口
P3M0 = 0x00;
P3M1 = 0x00;
P3M0 &= ~0x03;
P3M1 |= 0x03;
//设置USB使用的时钟源
IRC48MCR = 0x80; //使能内部48M高速IRC
while (!(IRC48MCR & 0x01)); //等待时钟稳定
USBCLK = 0x00; //使用CDC功能需要使用这两行,HID功能禁用这两行。
USBCON = 0x90;
}
void delay_ms(u16 ms) //unsigned int
{
u16 i;
do
{
i = MAIN_Fosc/6000;
while(--i);
}while(--ms);
}
总结
了解计数器的使用方法和应用场景文章来源:https://www.toymoban.com/news/detail-697197.html
课后练习:
尝试实现T法测速:又叫做周期测量法。这种方法是建立一个已知频率的高频脉冲并对其计数,计数时间由捕获到的编码器相邻两个脉冲的间隔时间TE决定, 计数值为M1。设编码器单圈总脉冲数为C,高频脉冲的频率为F0,则转速n的计算公式为: 文章来源地址https://www.toymoban.com/news/detail-697197.html
文章来源地址https://www.toymoban.com/news/detail-697197.html
到了这里,关于学习笔记|计数器|Keil软件中 0xFD问题|I/O口配置|STC32G单片机视频开发教程(冲哥)|第十二集:计数器的作用和意义的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!