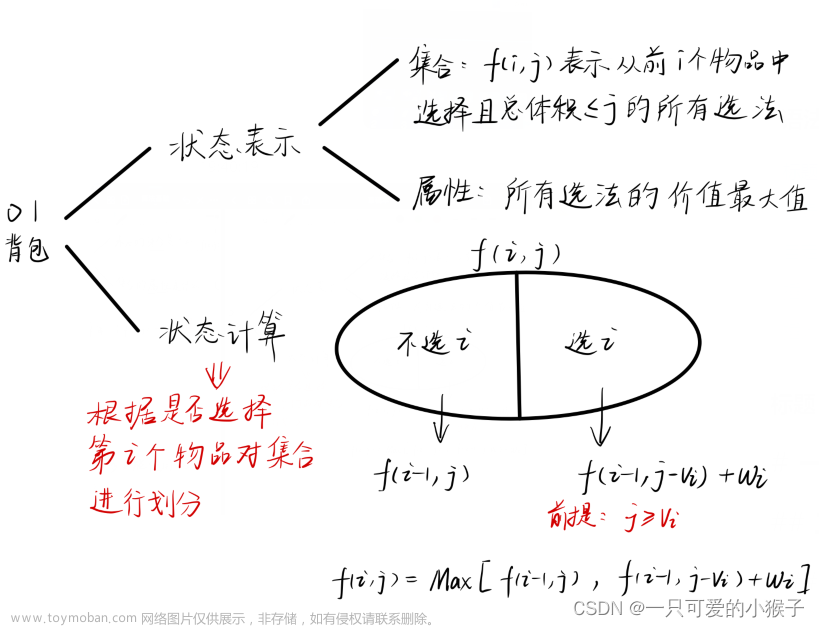
动态规划——斜率优化DP
适用情况
适用于求解最优解(最大、最小)问题。
可以将转移方程可以化为 \(\left[\begin{array}{rl} 仅与 \space i \space 有关 & 是我们想要最大/最小化的 \\ 仅与 \space j \space 有关 & 是已知的 \\ 与 \space i \space 和 \space j \space 都有关 & 是两项相乘 \end{array}\right]\) 三部分的,
都可以考虑用斜率优化。
形式化的:原式可化为 \(dp_i = \min\limits_{j \in [l,r]}\{ \mathrm y_j - k_ix_j \} - a_i\),
其中 \(y\)、\(k\)、\(x\) 均为人为规定与 \(dp\) 和常数有关的式子。
应用
前置知识:初中几何
-
斜率
已知两个点 \(\text{A}(x_1, y_1)\),\(\text{B}(x_2, y_2)\),则直线 \(\text{AB}\) 斜率为 \(\dfrac{y_1 - y_2}{x_1 - x_2}\)。 -
纵截距
直线 \(y = kx + b\) 的纵截距为 \(b\);即与 \(y\) 轴交点的纵坐标。 -
凸壳

求解步骤
| 设 \(A_i\)、\(B_i\),使状态转移方程转化为 | \(f_i = \min(f_j + (A_i - B_j) ^ 2)\) |
| 当 \(i\) 从 \(j\) 转移来时,丢掉 \(\min\) | \(f_i = f_j + {A_i} ^ 2 + {B_j} ^ 2 - 2 \times A_i \times B_j\) |
| 将仅和 \(j\) 有关的放在左边,其他的放在右边 | \(f_j + {B_j} ^ 2 = 2 \times A_i \times B_j + f_i - {A_i} ^ 2\) |
| 设 \(\left\{\begin{array}{ll} y_j &= f_j + {B_j} ^ 2 \\ k_i &= 2 \times A_i \\ x_j &= B_j \\ b_i &= f_i - {A_i} ^ 2 \\ \end{array}\right.\),原式转换为 | \(y_j=k_ix_j+b_i\) |
| 转移方程就写作 | \(b_i = \min\{ y_j-k_ix_j \}\) |
我们把 \((x_j,y_j)\) 看作二维平面上的点,则 \(k_i\) 表示直线斜率,\(b_i\) 表示一条过 \((x_j,y_j)\) 的斜率为 \(k_i\) 的直线的截距;问题转化为,选择合适的 \(j \in [1, i)\),最小化直线的截距。
如图,考虑最 native 的算法:我们将这个斜率为 \(k_i\) 的直线从下往上平移,直到有一个点 \((x_p,y_p)\) 在这条直线上,则有 \(b_i=y_p-k_ix_p\),这时 \(b_i\) 取到最小值。算完 \(f_i\),我们就把 \((x_i,y_i)\) 这个点加入点集中,以做为新的 DP 决策。那么,我们该如何维护点集?
容易发现,此时,\(b_i\) 所能取到最小值的点一定在下凸壳上。因此在寻找 \(p\) 的时候我们不需要枚举所有 \(i-1\) 个点,只需要考虑凸包上的点。
具体的,设 \(K(a,b)\) 表示过 \((x_a,y_a)\) 和 \((x_b,y_b)\) 的直线的斜率。考虑队列 \(q_l,q_{l+1},\ldots,q_r\),维护的是下凸壳上的点。
也就是说,对于 \(l<i<r\),始终有 \(K(q_{i-1},q_i) < K(q_i,q_{i+1})\) 成立;而我们需要找到一个 \(K(q_{e-1},q_e)\le k_i< K(q_e,q_{e+1})\) 的 \(e\)(特别的,当 \(e=l\) 或者 \(e=r\) 时要特别判断)。
一、若 \(k_i\) 关于 \(i\) 单调:
可以单调队列维护凸包。
具体的,我们维护一个指针 \(e\) 来计算 \(b_i\) 最小值,即 \(q_e\) 是 \(i\) 的最优决策点,由于 \(k_i\) 是单调的,则 \(e\) 也一定单调,因此 \(e\) 的移动次数是均摊 \(O(1)\) 的。
在插入一个点 \((x_i,y_i)\) 时,我们要判断是否 \(K(q_{r-1},q_r)<K(q_r,i)\),如果不成立(不形成下凸壳)就将 \(q_r\) 弹出,直到等式满足。然后将 \(i\) 插入到 \(q\) 队尾。
这样我们就将 DP 的复杂度优化到了 \(O(n)\);最后概括一下上述斜率优化模板题的算法:
- 将初始状态入队。
- 每次使用一条和 \(i\) 相关的直线 \(f(i)\) 去切维护的凸包,找到最优决策,更新 \(dp_i\)。
- 加入状态 \(dp_i\)。如果一个状态(即凸包上的一个点)在 \(dp_i\) 加入后不再是凸包上的点,需要在 \(dp_i\) 加入前将其剔除。
二、若 \(k_i\) 无单调性:
可以在凸壳上二分斜率。
直线的斜率没有单调性,则无法确定 \(q_l\) 是否可以弹出队列。
但是不影响原结构(凸壳)的单调性,因此我们在寻找最优决策点,也就是用直线切凸壳的时候,我们将单调队列找队首改为:凸壳上二分。我们二分查找满足 \(K(q_{e-1},q_e)\le k_i< K(q_e,q_{e+1})\) 那条凸壳边,就可以找到最优决策。
三、若 \(x_i\) 无单调性:
见:CDQ/平衡树优化DP(未整理)。
示例代码
例题:P3195 玩具装箱。
const int N = 5e4 + 10;
int n, l;
int s[N];
int q[N], dp[N];
int Gx(int k1, int k2) { return (2 * s[k1]) - (2 * s[k2]); }
int Gy(int k1, int k2) { return (dp[k1] + s[k1] * s[k1] + 2 * l * s[k1]) - (dp[k2] + s[k2] * s[k2] + 2 * l * s[k2]); }
int Gv(int i, int j) { return dp[j] + (s[i] - s[j] - l) * (s[i] - s[j] - l); }
signed main() {
scanf("%lld %lld", &n, &l); ++l;
for (int i = 1; i <= n; ++i) { scanf("%lld", s + i); s[i] += s[i - 1] + 1; }
int st = 0, ed = 1;
for (int i = 1; i <= n; ++i) {
while (st + 1 < ed && Gy(q[st + 1], q[st]) <= s[i] * Gx(q[st + 1], q[st])) ++st;
dp[i] = Gv(i, q[st]);
while (st + 1 < ed && Gx(q[ed - 1], q[ed - 2]) * Gy(i, q[ed - 1]) <= Gx(i, q[ed - 1]) * Gy(q[ed - 1], q[ed - 2])) --ed;
q[ed++] = i;
} printf("%lld\n", dp[n]);
return 0;
}
练习题
见:https://www.luogu.com.cn/training/386804文章来源:https://www.toymoban.com/news/detail-698383.html
Reference
[1] https://www.cnblogs.com/littlehb/p/15936381.html
[2] https://oi-wiki.org/dp/opt/slope/文章来源地址https://www.toymoban.com/news/detail-698383.html
到了这里,关于斜率优化DP 学习笔记的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!