一、源码下载
1、git下载
点击我下载文章来源地址https://www.toymoban.com/news/detail-698812.html
2、csdn下载
自己上传的点击下载
二、源码移植
我自己是使用rt-thread操作系统移植的。但是不局限与操作系统,裸机也可以。
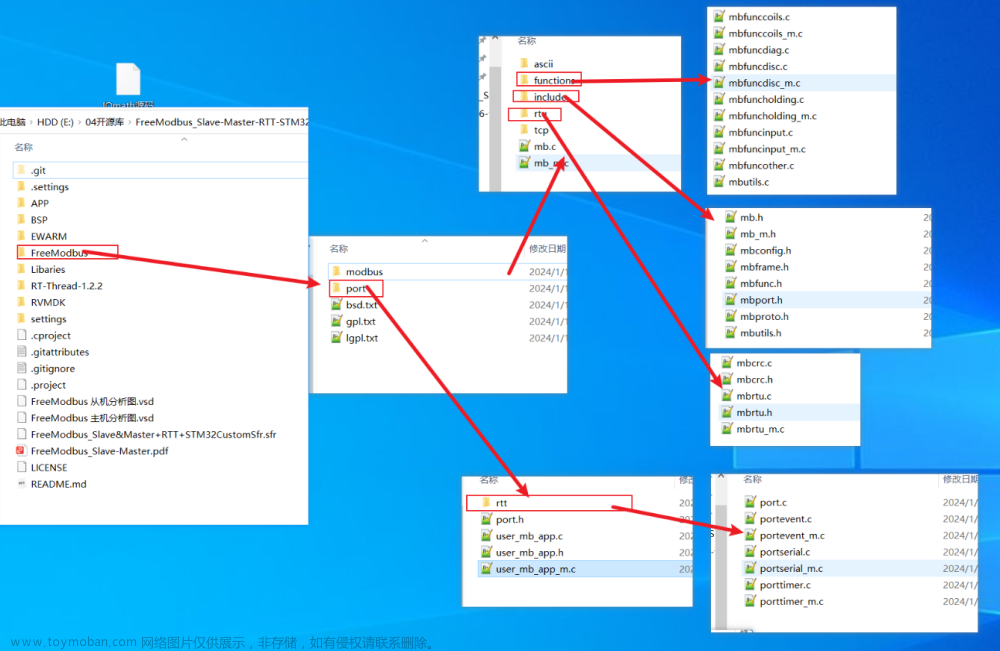
1、首先将源码加入到工程

2、分别实现一个内存的分配与释放函数,他是一个指针函数,原型为typedef void* (*CanardMemoryAllocate)(CanardInstance* ins, size_t amount);
static void* mem_allocate(CanardInstance* const canard, const size_t amount)
{
(void) canard;
return rt_malloc(amount);
}
static void mem_free(CanardInstance* const canard, void* const pointer)
{
(void) canard;
rt_free(pointer);
}
3、初始化canard
void slave_comm_init()
{
canard = canardInit(&mem_allocate, &mem_free);
canard.node_id = savePara.id;
txQueue = canardTxInit(1536, CANARD_MTU_CAN_CLASSIC); // Set MTU = 64 bytes. There is also CANARD_MTU_CAN_CLASSIC.
}
canard.node_id 设置本机idcanardTxInit(1536, CANARD_MTU_CAN_CLASSIC); 初始化发送队列,1536为大小。CANARD_MTU_CAN_CLASSIC表示使用的是普通的can,数据最大为8个字节,CANARD_MTU_CAN_FD表示使用的是can fd。
3、实现发送函数
void slave_comm_tx_process()
{
for (const CanardTxQueueItem* ti = NULL; (ti = canardTxPeek(&txQueue)) != NULL;) // Peek at the top of the queue.
{
if ((0U == ti->tx_deadline_usec) || (ti->tx_deadline_usec > rt_tick_get_millisecond()*1000)) // Check the deadline.
{
if (!slave_send_ext(ti->frame.extended_can_id,(void *)ti->frame.payload,ti->frame.payload_size)) // Send the frame over this redundant CAN iface.
{
break; // If the driver is busy, break and retry later.
}
}
// After the frame is transmitted or if it has timed out while waiting, pop it from the queue and deallocate:
canard.memory_free(&canard, canardTxPop(&txQueue, ti));
}
}
canard协议将发送的包处理完后会写入到队列中,canardTxPeek(&txQueue))从队列中取出数据,slave_send_ext(ti->frame.extended_can_id,(void *)ti->frame.payload,ti->frame.payload_size))为硬件发送函数,调用can发送。注意:UAVCAN使用的是扩展帧id。
硬件发送函数为:
rt_inline uint8_t slave_send_ext(uint32_t id,uint8_t *sendBuf,uint8_t len)
{
struct rt_can_msg txMsg = {0};
txMsg.id = id;
txMsg.ide = RT_CAN_EXTID;
txMsg.rtr = RT_CAN_DTR;
txMsg.len = len;
for(rt_uint8_t i=0;i<len;i++)
{
txMsg.data[i] = sendBuf[i];
}
return rt_device_write(slaveDev,0,&txMsg,sizeof(txMsg));
}
RT_CAN_EXTID表示使用扩展帧
4、实现can硬件接收处理函数
void slave_comm_rx_process()
{
CanardRxTransfer transfer;
CanardFrame receivedFrame;
struct rt_can_msg canRxMsg = {0};
uint32_t rxTimestampUsec;
int8_t result;
while(rt_mq_recv(&slave_rec_msgq,&canRxMsg,sizeof(canRxMsg),RT_WAITING_NO) == RT_EOK)
{
receivedFrame.extended_can_id = canRxMsg.id;
receivedFrame.payload_size = canRxMsg.len;
receivedFrame.payload = canRxMsg.data;
rxTimestampUsec = rt_tick_get_millisecond()*1000;
result = canardRxAccept(&canard,
rxTimestampUsec, // When the frame was received, in microseconds.
&receivedFrame, // The CAN frame received from the bus.
0, // If the transport is not redundant, use 0.
&transfer,
NULL);
if (result < 0)
{
// An error has occurred: either an argument is invalid or we've ran out of memory.
// It is possible to statically prove that an out-of-memory will never occur for a given application if
// the heap is sized correctly; for background, refer to the Robson's Proof and the documentation for O1Heap.
// Reception of an invalid frame is NOT an error.
}
else if (result == 1)
{
void process_received_transfer(const uint8_t index,CanardRxTransfer* const transfer);
process_received_transfer(0, &transfer); // A transfer has been received, process it.
canard.memory_free(&canard, transfer.payload); // Deallocate the dynamic memory afterwards.
}
else
{
// Nothing to do.
// The received frame is either invalid or it's a non-last frame of a multi-frame transfer.
// Reception of an invalid frame is NOT reported as an error because it is not an error.
}
}
}
实现方法是,在can的中断中接收到数据放入slave_rec_msgq队列,
struct rt_can_msg rxMsg = {0};
rt_device_read(slaveDev,0,&rxMsg,sizeof(rxMsg));
rt_mq_send(&slave_rec_msgq, &rxMsg, sizeof(rxMsg));
然后协议从队列中读取数据处理。
将can数据转为canard支持的数据类型。
receivedFrame.extended_can_id = canRxMsg.id;
receivedFrame.payload_size = canRxMsg.len;
receivedFrame.payload = canRxMsg.data;
当协议接收到完整的一帧数据后返回result等于1,自己处理接收到的数据。
process_received_transfer(0, &transfer); // A transfer has been received, process it.
实现为:
void process_received_transfer(const uint8_t index,CanardRxTransfer* const transfer)
{
LOG_D("slave rec id:%d size:%d",transfer->metadata.remote_node_id,transfer->payload_size);
if(transfer->metadata.remote_node_id == canard.node_id)
{
slavePackDef *p = (slavePackDef *)transfer->payload;
recCmd = p->packCmd;
}
}
数据保存在transfer->payload中。执行完毕后释放内存:canard.memory_free(&canard, transfer.payload); 。
5、订阅消息
在canard协议中消息有三种类型,分别是: CanardTransferKindMessage``CanardTransferKindResponse 、CanardTransferKindRequest
区别在于:CanardTransferKindMessage :广播,从发布者到所有订阅者。CanardTransferKindResponse:点对点,从服务器到客户端。CanardTransferKindRequest:点对点,从客户端到服务器。
一般来说从机为服务端,主机为客户端。
void slave_control_init()
{
(void) canardRxSubscribe(&canard, // Subscribe to an arbitrary service response.
CanardTransferKindResponse, // Specify that we want service responses, not requests.
SLAVE_RESPONSE_PORT_ID, // The Service-ID whose responses we will receive.
1536, // The extent (see above).
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&responseSubscription);
}
以上订阅了一个CanardTransferKindResponse类型的消息,Service-ID为SLAVE_RESPONSE_PORT_ID,
#define SLAVE_RESPONSE_PORT_ID 123
函数原型为:
int8_t canardRxSubscribe(CanardInstance* const ins,
const CanardTransferKind transfer_kind,
const CanardPortID port_id,
const size_t extent,
const CanardMicrosecond transfer_id_timeout_usec,
CanardRxSubscription* const out_subscription);
参数解析:ins:canard的一个实例,就是上面初始化的那个变量。transfer_kind:消息类型,上面说的三个。port_id:消息id。extent:定义了传输有效载荷存储器缓冲器的大小。transfer_id_timeout_usec:默认传输ID超时值定义。out_subscription:如果已根据请求创建新订阅,则返回值为1。
如果在调用函数时存在此类订阅,则返回值为0。在这种情况下,终止现有订阅,然后在其位置创建新订阅。挂起的传输可能会丢失。
如果任何输入参数无效,则返回值为否定的无效参数错误。
三、应用层数据发送
static void send_data()
{
static uint8_t messageTransferId = 0;
const CanardTransferMetadata transferMetadata = {
.priority = CanardPriorityNominal,
.transfer_kind = CanardTransferKindResponse,
.port_id = SLAVE_RESPONSE_PORT_ID,
.remote_node_id = id,
.transfer_id = messageTransferId,
};
uint8_t sendBuf[100];
for(uint8_t i=0;i<sizeof(sendBuf);i++)
{
sendBuf[i] = i;
}
++messageTransferId; transmission on this subject.
int32_t result = canardTxPush(&txQueue,
&canard,
0,
&transferMetadata,
sizeof(sendBuf),
sendBuf);
if (result < 0)
{
LOG_W("slave cmd send failed!");
}
}
需要注意的是:
const CanardTransferMetadata transferMetadata = {
.priority = CanardPriorityNominal,
.transfer_kind = CanardTransferKindResponse,
.port_id = SLAVE_RESPONSE_PORT_ID, // This is the subject-ID.
.remote_node_id = id, // Messages cannot be unicast, so use UNSET.
.transfer_id = messageTransferId,
};
transfer_kind 需要和上面订阅的消息类型一样才能接收成功。messageTransferId:每次发送都需要自加1。port_id:也需要和订阅消息port_id一样。文章来源:https://www.toymoban.com/news/detail-698812.html
四、移植成功源码下载
点击我下载
到了这里,关于stm32或gd32移植libcanard实现UAVCAN协议的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!