TCP协议是一种面向连接的、可靠的、基于字节流的运输层通信协议。它通过三次握手来建立连接,通过四次挥手来断开连接。
三次握手
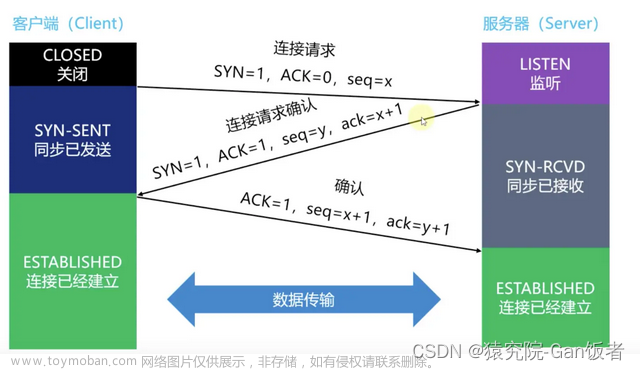
所谓三次握手,是指建立一个TCP连接时,需要客户端和服务器总共发送3个报文。三次握手的目的是连接服务器指定端口,建立TCP连接,并同步连接双方的序列号和确认号,交换TCP窗口大小信息。
三次握手过程的示意图如下:
客户端 服务器
| |
| SYN seq=x | 第一次握手
|-------------------------->|
| |
| SYN seq=y, ACK ack=x+1| 第二次握手
|<--------------------------|
| |
| ACK ack=y+1 | 第三次握手
|-------------------------->|
| |
- 第一次握手:客户端向服务器发送一个SYN报文段,表示请求建立连接,并随机选择一个初始序号x。发送完毕后,客户端进入SYN_SENT状态,等待服务器端确认。
- 第二次握手:服务器收到SYN报文段后,如果同意建立连接,就向客户端发送一个SYN+ACK报文段,表示确认客户端的请求,并随机选择一个初始序号y。同时,服务器将客户端的序号x加一作为自己的确认号ack。服务器进入SYN_RECV状态,等待客户端的确认。
- 第三次握手:客户端收到SYN+ACK报文段后,向服务器发送一个ACK报文段,表示确认服务器的回应,并将服务器的序号y加一作为自己的确认号ack。客户端进入ESTABLISHED状态,表示连接已经建立。服务器收到ACK报文段后,也进入ESTABLISHED状态,表示连接已经建立。
三次握手的伪代码
// 客户端
send SYN(x) // 发送SYN报文段,x为初始序号
state = SYN_SENT // 进入SYN_SENT状态
receive SYN(y)+ACK(x+1) // 接收SYN+ACK报文段,y为初始序号
send ACK(y+1) // 发送ACK报文段
state = ESTABLISHED // 进入ESTABLISHED状态
// 服务器
receive SYN(x) // 接收SYN报文段
send SYN(y)+ACK(x+1) // 发送SYN+ACK报文段
state = SYN_RECV // 进入SYN_RECV状态
receive ACK(y+1) // 接收ACK报文段
state = ESTABLISHED // 进入ESTABLISHED状态
c++代码
// 客户端
#include <iostream>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
using namespace std;
int main() {
int sockfd = socket(AF_INET, SOCK_STREAM, 0); // 创建套接字
if (sockfd == -1) {
cout << "socket error" << endl;
return -1;
}
struct sockaddr_in servaddr; // 服务器地址结构体
servaddr.sin_family = AF_INET; // 地址族
servaddr.sin_port = htons(8888); // 端口号
servaddr.sin_addr.s_addr = inet_addr("127.0.0.1"); // IP地址
int res = connect(sockfd, (struct sockaddr*)&servaddr, sizeof(servaddr)); // 发起连接请求
if (res == -1) {
cout << "connect error" << endl;
return -1;
}
cout << "connect success" << endl;
close(sockfd); // 关闭套接字
return 0;
}
// 服务器
#include <iostream>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
using namespace std;
int main() {
int listenfd = socket(AF_INET, SOCK_STREAM, 0); // 创建监听套接字
if (listenfd == -1) {
cout << "socket error" << endl;
return -1;
}
struct sockaddr_in servaddr; // 服务器地址结构体
servaddr.sin_family = AF_INET; // 地址族
servaddr.sin_port = htons(8888); // 端口号
servaddr.sin_addr.s_addr = INADDR_ANY; // IP地址
int res = bind(listenfd, (struct sockaddr*)&servaddr, sizeof(servaddr)); // 绑定地址和端口
if (res == -1) {
cout << "bind error" << endl;
return -1;
}
res = listen(listenfd, 5); // 开始监听
if (res == -1) {
cout << "listen error" << endl;
return -1;
}
cout << "listening..." << endl;
struct sockaddr_in cliaddr; // 客户端地址结构体
socklen_t len = sizeof(cliaddr); // 地址长度
int connfd = accept(listenfd, (struct sockaddr*)&cliaddr, &len); // 接受连接请求
if (connfd == -1) {
cout << "accept error" << endl;
return -1;
}
cout << "accept success" << endl;
close(connfd); // 关闭连接套接字
close(listenfd); // 关闭监听套接字
return 0;
}
四次挥手
所谓四次挥手,是指断开一个TCP连接时,需要客户端和服务器总共发送4个报文。四次挥手的目的是终止数据传输,并释放双方的资源。由于TCP是全双工模式,所以每个方向都需要单独进行关闭。
四次挥手过程的示意图如下:
客户端 服务器
| |
| FIN seq=u | 第一次挥手
|-------------------------->|
| |
| ACK ack=u+1 | 第二次挥手
|<--------------------------|
| |
| FIN seq=v | 第三次挥手
|<--------------------------|
| |
| ACK ack=v+1 | 第四次挥手
|-------------------------->|
| |
- 第一次挥手:主动关闭方向被动关闭方发送一个FIN报文段,表示请求关闭连接,并停止发送数据。主动关闭方进入FIN_WAIT_1状态,等待被动关闭方的回应。
- 第二次挥手:被动关闭方收到FIN报文段后,向主动关闭方发送一个ACK报文段,表示确认收到请求,并继续发送数据。被动关闭方进入CLOSE_WAIT状态,等待数据发送完毕。主动关闭方收到ACK报文段后,进入FIN_WAIT_2状态,等待被动关闭方的关闭请求。
- 第三次挥手:被动关闭方发送完所有数据后,向主动关闭方发送一个FIN报文段,表示请求关闭连接,并停止发送数据。被动关闭方进入LAST_ACK状态,等待主动关闭方的确认。
- 第四次挥手:主动关闭方收到FIN报文段后,向被动关闭方发送一个ACK报文段,表示确认收到请求,并进入TIME_WAIT状态,等待一段时间后释放资源。被动关闭方收到ACK报文段后,进入CLOSED状态,释放资源。
四次挥手伪代码
// 主动关闭方
send FIN // 发送FIN报文段
state = FIN_WAIT_1 // 进入FIN_WAIT_1状态
receive ACK // 接收ACK报文段
state = FIN_WAIT_2 // 进入FIN_WAIT_2状态
receive FIN // 接收FIN报文段
send ACK // 发送ACK报文段
state = TIME_WAIT // 进入TIME_WAIT状态
wait 2MSL // 等待2MSL时间
state = CLOSED // 进入CLOSED状态
// 被动关闭方
receive FIN // 接收FIN报文段
send ACK // 发送ACK报文段
state = CLOSE_WAIT // 进入CLOSE_WAIT状态
send all data // 发送所有数据
send FIN // 发送FIN报文段
state = LAST_ACK // 进入LAST_ACK状态
receive ACK // 接收ACK报文段
state = CLOSED // 进入CLOSED状态
c++代码
// 主动关闭方(客户端)
#include <iostream>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
using namespace std;
int main() {
int sockfd = socket(AF_INET, SOCK_STREAM, 0); // 创建套接字
if (sockfd == -1) {
cout << "socket error" << endl;
return -1;
}
struct sockaddr_in servaddr; // 服务器地址结构体
servaddr.sin_family = AF_INET; // 地址族
servaddr.sin_port = htons(8888); // 端口号
servaddr.sin_addr.s_addr = inet_addr("127.0.0.1"); // IP地址
int res = connect(sockfd, (struct sockaddr*)&servaddr, sizeof(servaddr)); // 发起连接请求
if (res == -1) {
cout << "connect error" << endl;
return -1;
}
cout << "connect success" << endl;
char buf[1024]; // 缓冲区
while (true) {
cin.getline(buf, sizeof(buf)); // 从标准输入读取一行数据
if (strcmp(buf, "exit") == 0) { // 如果输入exit,则退出循环
break;
}
res = write(sockfd, buf, strlen(buf)); // 向服务器发送数据
if (res == -1) {
cout << "write error" << endl;
return -1;
}
res = read(sockfd, buf, sizeof(buf)-1); // 从服务器接收数据
if (res == -1) {
cout << "read error" << endl;
return -1;
}
buf[res] = 0; // 添加字符串结束符
cout << buf << endl; // 输出服务器回复的数据
}
res = shutdown(sockfd, SHUT_WR); // 发送FIN报文段,请求关闭连接
if (res == -1) {
cout << "shutdown error" << endl;
return -1;
}
cout << "shutdown success" << endl;
res = read(sockfd, buf, sizeof(buf)-1); // 接收服务器的最后一个数据包
if (res == -1) {
cout << "read error" << endl;
return -1;
}
buf[res] = 0; // 添加字符串结束符
cout << buf << endl; // 输出服务器的最后一个数据包
close(sockfd); // 关闭套接字
return 0;
}
// 被动关闭方(服务器)
#include <iostream>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
using namespace std;
int main() {
int listenfd = socket(AF_INET, SOCK_STREAM, 0); // 创建监听套接字
if (listenfd == -1) {
cout << "socket error" << endl;
return -1;
}
struct sockaddr_in servaddr; // 服务器地址结构体
servaddr.sin_family = AF_INET; // 地址族
servaddr.sin_port = htons(8888); // 端口号
servaddr.sin_addr.s_addr = INADDR_ANY; // IP地址
int res = bind(listenfd, (struct sockaddr*)&servaddr, sizeof(servaddr)); // 绑定地址和端口
if (res == -1) {
cout << "bind error" << endl;
return -1;
}
res = listen(listenfd, 5); // 开始监听
if (res == -1) {
cout << "listen error" << endl;
return -1;
}
cout << "listening..." << endl;
struct sockaddr_in cliaddr; // 客户端地址结构体
socklen_t len = sizeof(cliaddr); // 地址长度
int connfd = accept(listenfd, (struct sockaddr*)&cliaddr, &len); // 接受连接请求
if (connfd == -1) {
cout << "accept error" << endl;
return -1;
}
cout << "accept success" << endl;
char buf[1024]; // 缓冲区
while (true) {
res = read(connfd, buf, sizeof(buf)-1); // 从客户端接收数据
if (res == -1) {
cout << "read error" << endl;
return -1;
}
if (res == 0) { // 如果收到FIN报文段,表示客户端请求关闭连接
break;
}
buf[res] = 0; // 添加字符串结束符
cout << buf << endl; // 输出客户端发送的数据
res = write(connfd, buf, strlen(buf)); // 向客户端发送数据
if (res == -1) {
cout << "write error" << endl;
return -1;
}
}
strcpy(buf, "bye"); // 准备最后一个数据包
res = write(connfd, buf, strlen(buf)); // 向客户端发送最后一个数据包
if (res == -1) {
cout << "write error" << endl;
return -1;
}
res = shutdown(connfd, SHUT_WR); // 发送FIN报文段,请求关闭连接
if (res == -1) {
cout << "shutdown error" << endl;
return -1;
}
cout << "shutdown success" << endl;
close(connfd); // 关闭连接套接字
close(listenfd); // 关闭监听套接字
return 0;
}
常见问题
- 为什么连接的时候是三次握手,关闭的时候却是四次挥手?
答:因为当服务器端收到客户端的SYN连接请求报文后,可以直接发送SYN+ACK报文。其中ACK报文是用来应答的,SYN报文是用来同步的。但是关闭连接时,当服务器端收到FIN报文时,很可能并不会立即关闭SOCKET,所以只能先回复一个ACK报文,告诉客户端,“你发的FIN报文我收到了”。只有等到服务器端所有的报文都发送完了,服务器端才能发送FIN报文,因此不能一起发送。故需要四步握手。
- 为什么TIME_WAIT状态需要经过2MSL(最大报文段生存时间)才能返回到CLOSE状态?
答:虽然按道理,四个报文都发送完毕,我们可以直接进入CLOSE状态了,但是我们必须假象网络是不可靠的,有可能最后一个ACK丢失。所以TIME_WAIT状态就是用来重发可能丢失的ACK报文。在客户端发送出最后的ACK回复,但该ACK可能丢失。服务器端如果没有收到ACK,将不断重复发送FIN片段。所以客户端不能立即关闭,它必须确认服务器端接收到了该ACK。客户端会在发送出ACK之后进入到TIME_WAIT状态。客户端会设置一个计时器,等待2MSL的时间。如果在该时间内再次收到FIN,那么客户端会重发ACK并再次等待2MSL。所谓的2MSL是两倍的MSL(Maximum Segment Lifetime)。MSL指一个片段在网络中最大的存活时间,2MSL就是一个发送和一个回复所需的最大时间。如果直到2MSL,客户端都没有再次收到FIN,那么客户端推断ACK已经被成功接收,则结束TCP连接。文章来源:https://www.toymoban.com/news/detail-699889.html
- 为什么不能用两次握手进行连接?
答:3次握手完成两个重要的功能,既要双方做好发送数据的准备工作(双方都知道彼此已准备好),也要允许双方就初始序列号进行协商,这个序列号在握手过程中被发送和确认。现在把三次握手改成仅需要两次握手,死锁是可能发生的。作为例子,考虑计算机S和C之间的通信,假定C给S发送一个连接请求分组,S收到了这个分组,并发送了确认应答分组。按照两次握手的协定,S认为连接已经成功地建立了,可以开始发送数据分组。可是,C在S的应答分组在传输中被丢失的情况下,将不知道S是否已准备好,不知道S建立什么样的序列号,C甚至怀疑S是否收到自己的连接请求分组。在这种情况下,C认为连接还未建立成功,将忽略S发来的任何数据分组,只等待连接确认应答分组。而S在发出的分组超时后,重复发送同样的分组。这样就形成了死锁。文章来源地址https://www.toymoban.com/news/detail-699889.html
到了这里,关于三次握手四次挥手的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!