前言
最近我在做论文实验时从MSCOCO数据集中筛选了符合条件的1260张图片,但数据样本太少了,于是我就利用数据增强的方法实现了带标签的样本扩充,最后扩充为7560张图片。本文就来记录一下过程,有不懂的地方欢迎留言噢~

目录
前言
👥一、什么是数据增强
👥二、数据增强的作用
👥三、常见的数据增强
👥四、如何在YOLO中实现数据增强
第①步 前期准备
第②步 加入数据增强的代码
第③步 运行
第④步 将xml文件转化为txt文件
🌟本人YOLOv5系列导航

👥一、什么是数据增强
数据增强是一种重要的机器学习方法之一,是基于已有的训练样本数据来生成更多的训练数据,其目的就是为了使扩增的训练数据尽可能接近真实分布的数据,从而提高检测精度。此外,数据增强能够迫使模型学习到更多鲁棒性的特征,从而有效提高模型的泛化能力。
在实际的应用场景中,足量且高保真的优质数据集通常是可遇不可求的,这不仅费钱费时费力,而且隐私保护和极端概率问题,数据集的获取变得尤为困难。因此,一种低成本且有效的方法便是利用数据增强来减少对训练数据的依赖,从而帮助开发人员更好更快地构建高精度的 AI 模型。

👥二、数据增强的作用
(1) 避免过拟合。当数据集具有某种明显的特征,例如数据集中图片基本在同一个场景中拍摄,使用Cutout方法和风格迁移变化等相关方法可避免模型学到跟目标无关的信息。
(2)提升模型鲁棒性,降低模型对图像的敏感度。当训练数据都属于比较理想的状态,碰到一些特殊情况,如遮挡,亮度,模糊等情况容易识别错误,对训练数据加上噪声,掩码等方法可提升模型鲁棒性。
(3)增加训练数据,提高模型泛化能力。
(4)避免样本不均衡。在工业缺陷检测方面,医疗疾病识别方面,容易出现正负样本极度不平衡的情况,通过对少样本进行一些数据增强方法,降低样本不均衡比例。
👥三、常见的数据增强
(1)比较常用的几何变换方法主要有:
- 翻转
- 旋转
- 裁剪
- 缩放
- 平移
- 抖动
值得注意的是,在某些具体的任务中,当使用这些方法时需要主要标签数据的变化,如目标检测中若使用翻转,则需要将gt框进行相应的调整。
(2)比较常用的像素变换方法主要有:
- 加椒盐噪声
- 高斯噪声
- 进行高斯模糊
- 调整HSV对比度
- 调节亮度
- 饱和度
- 直方图均衡化
- 调整白平衡等
👥四、如何在YOLO中实现数据增强
第①步 前期准备
实验前我们首先要准备好数据集图片以及标注好的xml文件(如何标注数据集可看这篇:YOLOv5入门实践(2)——手把手教你利用labelimg标注数据集)

在扩充前,数据集只有1260张图片。

第②步 加入数据增强的代码
在项目中新建一个文件,然后复制下面的代码:
# -*- coding=utf-8 -*-
import time
import random
import copy
import cv2
import os
import math
import numpy as np
from skimage.util import random_noise
from lxml import etree, objectify
import xml.etree.ElementTree as ET
import argparse
# 显示图片
def show_pic(img, bboxes=None):
'''
输入:
img:图像array
bboxes:图像的所有boudning box list, 格式为[[x_min, y_min, x_max, y_max]....]
names:每个box对应的名称
'''
for i in range(len(bboxes)):
bbox = bboxes[i]
x_min = bbox[0]
y_min = bbox[1]
x_max = bbox[2]
y_max = bbox[3]
cv2.rectangle(img, (int(x_min), int(y_min)), (int(x_max), int(y_max)), (0, 255, 0), 3)
cv2.namedWindow('pic', 0) # 1表示原图
cv2.moveWindow('pic', 0, 0)
cv2.resizeWindow('pic', 1200, 800) # 可视化的图片大小
cv2.imshow('pic', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 图像均为cv2读取
class DataAugmentForObjectDetection():
def __init__(self, rotation_rate=0.5, max_rotation_angle=5,
crop_rate=0.5, shift_rate=0.5, change_light_rate=0.5,
add_noise_rate=0.5, flip_rate=0.5,
cutout_rate=0.5, cut_out_length=50, cut_out_holes=1, cut_out_threshold=0.5,
is_addNoise=True, is_changeLight=True, is_cutout=True, is_rotate_img_bbox=True,
is_crop_img_bboxes=True, is_shift_pic_bboxes=True, is_filp_pic_bboxes=True):
# 配置各个操作的属性
self.rotation_rate = rotation_rate
self.max_rotation_angle = max_rotation_angle
self.crop_rate = crop_rate
self.shift_rate = shift_rate
self.change_light_rate = change_light_rate
self.add_noise_rate = add_noise_rate
self.flip_rate = flip_rate
self.cutout_rate = cutout_rate
self.cut_out_length = cut_out_length
self.cut_out_holes = cut_out_holes
self.cut_out_threshold = cut_out_threshold
# 是否使用某种增强方式
self.is_addNoise = is_addNoise
self.is_changeLight = is_changeLight
self.is_cutout = is_cutout
self.is_rotate_img_bbox = is_rotate_img_bbox
self.is_crop_img_bboxes = is_crop_img_bboxes
self.is_shift_pic_bboxes = is_shift_pic_bboxes
self.is_filp_pic_bboxes = is_filp_pic_bboxes
# ----1.加噪声---- #
def _addNoise(self, img):
'''
输入:
img:图像array
输出:
加噪声后的图像array,由于输出的像素是在[0,1]之间,所以得乘以255
'''
# return cv2.GaussianBlur(img, (11, 11), 0)
return random_noise(img, mode='gaussian', seed=int(time.time()), clip=True) * 255
# ---2.调整亮度--- #
def _changeLight(self, img):
alpha = random.uniform(0.35, 1)
blank = np.zeros(img.shape, img.dtype)
return cv2.addWeighted(img, alpha, blank, 1 - alpha, 0)
# ---3.cutout--- #
def _cutout(self, img, bboxes, length=100, n_holes=1, threshold=0.5):
'''
原版本:https://github.com/uoguelph-mlrg/Cutout/blob/master/util/cutout.py
Randomly mask out one or more patches from an image.
Args:
img : a 3D numpy array,(h,w,c)
bboxes : 框的坐标
n_holes (int): Number of patches to cut out of each image.
length (int): The length (in pixels) of each square patch.
'''
def cal_iou(boxA, boxB):
'''
boxA, boxB为两个框,返回iou
boxB为bouding box
'''
# determine the (x, y)-coordinates of the intersection rectangle
xA = max(boxA[0], boxB[0])
yA = max(boxA[1], boxB[1])
xB = min(boxA[2], boxB[2])
yB = min(boxA[3], boxB[3])
if xB <= xA or yB <= yA:
return 0.0
# compute the area of intersection rectangle
interArea = (xB - xA + 1) * (yB - yA + 1)
# compute the area of both the prediction and ground-truth
# rectangles
boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1)
boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1)
iou = interArea / float(boxBArea)
return iou
# 得到h和w
if img.ndim == 3:
h, w, c = img.shape
else:
_, h, w, c = img.shape
mask = np.ones((h, w, c), np.float32)
for n in range(n_holes):
chongdie = True # 看切割的区域是否与box重叠太多
while chongdie:
y = np.random.randint(h)
x = np.random.randint(w)
y1 = np.clip(y - length // 2, 0,
h) # numpy.clip(a, a_min, a_max, out=None), clip这个函数将将数组中的元素限制在a_min, a_max之间,大于a_max的就使得它等于 a_max,小于a_min,的就使得它等于a_min
y2 = np.clip(y + length // 2, 0, h)
x1 = np.clip(x - length // 2, 0, w)
x2 = np.clip(x + length // 2, 0, w)
chongdie = False
for box in bboxes:
if cal_iou([x1, y1, x2, y2], box) > threshold:
chongdie = True
break
mask[y1: y2, x1: x2, :] = 0.
img = img * mask
return img
# ---4.旋转--- #
def _rotate_img_bbox(self, img, bboxes, angle=5, scale=1.):
'''
参考:https://blog.csdn.net/u014540717/article/details/53301195crop_rate
输入:
img:图像array,(h,w,c)
bboxes:该图像包含的所有boundingboxs,一个list,每个元素为[x_min, y_min, x_max, y_max],要确保是数值
angle:旋转角度
scale:默认1
输出:
rot_img:旋转后的图像array
rot_bboxes:旋转后的boundingbox坐标list
'''
# 旋转图像
w = img.shape[1]
h = img.shape[0]
# 角度变弧度
rangle = np.deg2rad(angle) # angle in radians
# now calculate new image width and height
nw = (abs(np.sin(rangle) * h) + abs(np.cos(rangle) * w)) * scale
nh = (abs(np.cos(rangle) * h) + abs(np.sin(rangle) * w)) * scale
# ask OpenCV for the rotation matrix
rot_mat = cv2.getRotationMatrix2D((nw * 0.5, nh * 0.5), angle, scale)
# calculate the move from the old center to the new center combined
# with the rotation
rot_move = np.dot(rot_mat, np.array([(nw - w) * 0.5, (nh - h) * 0.5, 0]))
# the move only affects the translation, so update the translation
rot_mat[0, 2] += rot_move[0]
rot_mat[1, 2] += rot_move[1]
# 仿射变换
rot_img = cv2.warpAffine(img, rot_mat, (int(math.ceil(nw)), int(math.ceil(nh))), flags=cv2.INTER_LANCZOS4)
# 矫正bbox坐标
# rot_mat是最终的旋转矩阵
# 获取原始bbox的四个中点,然后将这四个点转换到旋转后的坐标系下
rot_bboxes = list()
for bbox in bboxes:
xmin = bbox[0]
ymin = bbox[1]
xmax = bbox[2]
ymax = bbox[3]
point1 = np.dot(rot_mat, np.array([(xmin + xmax) / 2, ymin, 1]))
point2 = np.dot(rot_mat, np.array([xmax, (ymin + ymax) / 2, 1]))
point3 = np.dot(rot_mat, np.array([(xmin + xmax) / 2, ymax, 1]))
point4 = np.dot(rot_mat, np.array([xmin, (ymin + ymax) / 2, 1]))
# 合并np.array
concat = np.vstack((point1, point2, point3, point4))
# 改变array类型
concat = concat.astype(np.int32)
# 得到旋转后的坐标
rx, ry, rw, rh = cv2.boundingRect(concat)
rx_min = rx
ry_min = ry
rx_max = rx + rw
ry_max = ry + rh
# 加入list中
rot_bboxes.append([rx_min, ry_min, rx_max, ry_max])
return rot_img, rot_bboxes
# ---5.裁剪--- #
def _crop_img_bboxes(self, img, bboxes):
'''
裁剪后的图片要包含所有的框
输入:
img:图像array
bboxes:该图像包含的所有boundingboxs,一个list,每个元素为[x_min, y_min, x_max, y_max],要确保是数值
输出:
crop_img:裁剪后的图像array
crop_bboxes:裁剪后的bounding box的坐标list
'''
# 裁剪图像
w = img.shape[1]
h = img.shape[0]
x_min = w # 裁剪后的包含所有目标框的最小的框
x_max = 0
y_min = h
y_max = 0
for bbox in bboxes:
x_min = min(x_min, bbox[0])
y_min = min(y_min, bbox[1])
x_max = max(x_max, bbox[2])
y_max = max(y_max, bbox[3])
d_to_left = x_min # 包含所有目标框的最小框到左边的距离
d_to_right = w - x_max # 包含所有目标框的最小框到右边的距离
d_to_top = y_min # 包含所有目标框的最小框到顶端的距离
d_to_bottom = h - y_max # 包含所有目标框的最小框到底部的距离
# 随机扩展这个最小框
crop_x_min = int(x_min - random.uniform(0, d_to_left))
crop_y_min = int(y_min - random.uniform(0, d_to_top))
crop_x_max = int(x_max + random.uniform(0, d_to_right))
crop_y_max = int(y_max + random.uniform(0, d_to_bottom))
# 随机扩展这个最小框 , 防止别裁的太小
# crop_x_min = int(x_min - random.uniform(d_to_left//2, d_to_left))
# crop_y_min = int(y_min - random.uniform(d_to_top//2, d_to_top))
# crop_x_max = int(x_max + random.uniform(d_to_right//2, d_to_right))
# crop_y_max = int(y_max + random.uniform(d_to_bottom//2, d_to_bottom))
# 确保不要越界
crop_x_min = max(0, crop_x_min)
crop_y_min = max(0, crop_y_min)
crop_x_max = min(w, crop_x_max)
crop_y_max = min(h, crop_y_max)
crop_img = img[crop_y_min:crop_y_max, crop_x_min:crop_x_max]
# 裁剪boundingbox
# 裁剪后的boundingbox坐标计算
crop_bboxes = list()
for bbox in bboxes:
crop_bboxes.append([bbox[0] - crop_x_min, bbox[1] - crop_y_min, bbox[2] - crop_x_min, bbox[3] - crop_y_min])
return crop_img, crop_bboxes
# ---6.平移--- #
def _shift_pic_bboxes(self, img, bboxes):
'''
平移后的图片要包含所有的框
输入:
img:图像array
bboxes:该图像包含的所有boundingboxs,一个list,每个元素为[x_min, y_min, x_max, y_max],要确保是数值
输出:
shift_img:平移后的图像array
shift_bboxes:平移后的bounding box的坐标list
'''
# 平移图像
w = img.shape[1]
h = img.shape[0]
x_min = w # 裁剪后的包含所有目标框的最小的框
x_max = 0
y_min = h
y_max = 0
for bbox in bboxes:
x_min = min(x_min, bbox[0])
y_min = min(y_min, bbox[1])
x_max = max(x_max, bbox[2])
y_max = max(y_max, bbox[3])
d_to_left = x_min # 包含所有目标框的最大左移动距离
d_to_right = w - x_max # 包含所有目标框的最大右移动距离
d_to_top = y_min # 包含所有目标框的最大上移动距离
d_to_bottom = h - y_max # 包含所有目标框的最大下移动距离
x = random.uniform(-(d_to_left - 1) / 3, (d_to_right - 1) / 3)
y = random.uniform(-(d_to_top - 1) / 3, (d_to_bottom - 1) / 3)
M = np.float32([[1, 0, x], [0, 1, y]]) # x为向左或右移动的像素值,正为向右负为向左; y为向上或者向下移动的像素值,正为向下负为向上
shift_img = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
# 平移boundingbox
shift_bboxes = list()
for bbox in bboxes:
shift_bboxes.append([bbox[0] + x, bbox[1] + y, bbox[2] + x, bbox[3] + y])
return shift_img, shift_bboxes
# ---7.镜像--- #
def _filp_pic_bboxes(self, img, bboxes):
'''
平移后的图片要包含所有的框
输入:
img:图像array
bboxes:该图像包含的所有boundingboxs,一个list,每个元素为[x_min, y_min, x_max, y_max],要确保是数值
输出:
flip_img:平移后的图像array
flip_bboxes:平移后的bounding box的坐标list
'''
# 翻转图像
flip_img = copy.deepcopy(img)
h, w, _ = img.shape
sed = random.random()
if 0 < sed < 0.33: # 0.33的概率水平翻转,0.33的概率垂直翻转,0.33是对角反转
flip_img = cv2.flip(flip_img, 0) # _flip_x
inver = 0
elif 0.33 < sed < 0.66:
flip_img = cv2.flip(flip_img, 1) # _flip_y
inver = 1
else:
flip_img = cv2.flip(flip_img, -1) # flip_x_y
inver = -1
# 调整boundingbox
flip_bboxes = list()
for box in bboxes:
x_min = box[0]
y_min = box[1]
x_max = box[2]
y_max = box[3]
if inver == 0:
#0:垂直翻转
flip_bboxes.append([x_min, h - y_max, x_max, h - y_min])
elif inver == 1:
# 1:水平翻转
flip_bboxes.append([w - x_max, y_min, w - x_min, y_max])
elif inver == -1:
# -1:水平垂直翻转
flip_bboxes.append([w - x_max, h - y_max, w - x_min, h - y_min])
return flip_img, flip_bboxes
# 图像增强方法
def dataAugment(self, img, bboxes):
'''
图像增强
输入:
img:图像array
bboxes:该图像的所有框坐标
输出:
img:增强后的图像
bboxes:增强后图片对应的box
'''
change_num = 0 # 改变的次数
# print('------')
while change_num < 1: # 默认至少有一种数据增强生效
if self.is_rotate_img_bbox:
if random.random() > self.rotation_rate: # 旋转
change_num += 1
angle = random.uniform(-self.max_rotation_angle, self.max_rotation_angle)
scale = random.uniform(0.7, 0.8)
img, bboxes = self._rotate_img_bbox(img, bboxes, angle, scale)
if self.is_shift_pic_bboxes:
if random.random() < self.shift_rate: # 平移
change_num += 1
img, bboxes = self._shift_pic_bboxes(img, bboxes)
if self.is_changeLight:
if random.random() > self.change_light_rate: # 改变亮度
change_num += 1
img = self._changeLight(img)
if self.is_addNoise:
if random.random() < self.add_noise_rate: # 加噪声
change_num += 1
img = self._addNoise(img)
if self.is_cutout:
if random.random() < self.cutout_rate: # cutout
change_num += 1
img = self._cutout(img, bboxes, length=self.cut_out_length, n_holes=self.cut_out_holes,
threshold=self.cut_out_threshold)
if self.is_filp_pic_bboxes:
if random.random() < self.flip_rate: # 翻转
change_num += 1
img, bboxes = self._filp_pic_bboxes(img, bboxes)
return img, bboxes
# xml解析工具
class ToolHelper():
# 从xml文件中提取bounding box信息, 格式为[[x_min, y_min, x_max, y_max, name]]
def parse_xml(self, path):
'''
输入:
xml_path: xml的文件路径
输出:
从xml文件中提取bounding box信息, 格式为[[x_min, y_min, x_max, y_max, name]]
'''
tree = ET.parse(path)
root = tree.getroot()
objs = root.findall('object')
coords = list()
for ix, obj in enumerate(objs):
name = obj.find('name').text
box = obj.find('bndbox')
x_min = int(box[0].text)
y_min = int(box[1].text)
x_max = int(box[2].text)
y_max = int(box[3].text)
coords.append([x_min, y_min, x_max, y_max, name])
return coords
# 保存图片结果
def save_img(self, file_name, save_folder, img):
cv2.imwrite(os.path.join(save_folder, file_name), img)
# 保持xml结果
def save_xml(self, file_name, save_folder, img_info, height, width, channel, bboxs_info):
'''
:param file_name:文件名
:param save_folder:#保存的xml文件的结果
:param height:图片的信息
:param width:图片的宽度
:param channel:通道
:return:
'''
folder_name, img_name = img_info # 得到图片的信息
E = objectify.ElementMaker(annotate=False)
anno_tree = E.annotation(
E.folder(folder_name),
E.filename(img_name),
E.path(os.path.join(folder_name, img_name)),
E.source(
E.database('Unknown'),
),
E.size(
E.width(width),
E.height(height),
E.depth(channel)
),
E.segmented(0),
)
labels, bboxs = bboxs_info # 得到边框和标签信息
for label, box in zip(labels, bboxs):
anno_tree.append(
E.object(
E.name(label),
E.pose('Unspecified'),
E.truncated('0'),
E.difficult('0'),
E.bndbox(
E.xmin(box[0]),
E.ymin(box[1]),
E.xmax(box[2]),
E.ymax(box[3])
)
))
etree.ElementTree(anno_tree).write(os.path.join(save_folder, file_name), pretty_print=True)
if __name__ == '__main__':
need_aug_num = 5 # 每张图片需要增强的次数
is_endwidth_dot = True # 文件是否以.jpg或者png结尾
dataAug = DataAugmentForObjectDetection() # 数据增强工具类
toolhelper = ToolHelper() # 工具
# 获取相关参数
parser = argparse.ArgumentParser()
parser.add_argument('--source_img_path', type=str, default='data/MSCOCO_train_img')
parser.add_argument('--source_xml_path', type=str, default='data/MSCOCO_train_xml')
parser.add_argument('--save_img_path', type=str, default='data/Images2')
parser.add_argument('--save_xml_path', type=str, default='data/Annotations2')
args = parser.parse_args()
source_img_path = args.source_img_path # 图片原始位置
source_xml_path = args.source_xml_path # xml的原始位置
save_img_path = args.save_img_path # 图片增强结果保存文件
save_xml_path = args.save_xml_path # xml增强结果保存文件
# 如果保存文件夹不存在就创建
if not os.path.exists(save_img_path):
os.mkdir(save_img_path)
if not os.path.exists(save_xml_path):
os.mkdir(save_xml_path)
for parent, _, files in os.walk(source_img_path):
files.sort()
for file in files:
cnt = 0
pic_path = os.path.join(parent, file)
xml_path = os.path.join(source_xml_path, file[:-4] + '.xml')
values = toolhelper.parse_xml(xml_path) # 解析得到box信息,格式为[[x_min,y_min,x_max,y_max,name]]
coords = [v[:4] for v in values] # 得到框
labels = [v[-1] for v in values] # 对象的标签
# 如果图片是有后缀的
if is_endwidth_dot:
# 找到文件的最后名字
dot_index = file.rfind('.')
_file_prefix = file[:dot_index] # 文件名的前缀
_file_suffix = file[dot_index:] # 文件名的后缀
img = cv2.imread(pic_path)
# show_pic(img, coords) # 显示原图
while cnt < need_aug_num: # 继续增强
auged_img, auged_bboxes = dataAug.dataAugment(img, coords)
auged_bboxes_int = np.array(auged_bboxes).astype(np.int32)
height, width, channel = auged_img.shape # 得到图片的属性
img_name = '{}_{}{}'.format(_file_prefix, cnt + 1, _file_suffix) # 图片保存的信息
toolhelper.save_img(img_name, save_img_path,
auged_img) # 保存增强图片
toolhelper.save_xml('{}_{}.xml'.format(_file_prefix, cnt + 1),
save_xml_path, (save_img_path, img_name), height, width, channel,
(labels, auged_bboxes_int)) # 保存xml文件
# show_pic(auged_img, auged_bboxes) # 强化后的图
print(img_name)
cnt += 1 # 继续增强下一张
以上代码包含加噪声、改变亮度、裁剪、平移、旋转、镜像、cutout等方法。要是想选用特定的方法,就修改代码中的参数设置。
接下来我们只需要改变文件路径。
我是将image文件和xml文件都放在data文件下,所以路径改为:

第③步 运行
修改need_aug_num的值,也就是每张图片需要增强的次数,这个根据需要设置。这里我设置的是5。

然后就可以运行该文件。
注意:图片和xml标签一定要一一对应,否则会因无法识别而中断。
运行之后我们可以看到每张图片增强5次

由上一步我们可以看出,目标检测增强后的图片默认会保存在./data/Images2中,xml文件会保存在./data/Annotations2中(包括新的图片和xml文件)

来看看效果吧:
原图:

增强后:





最终扩充为7560张图片

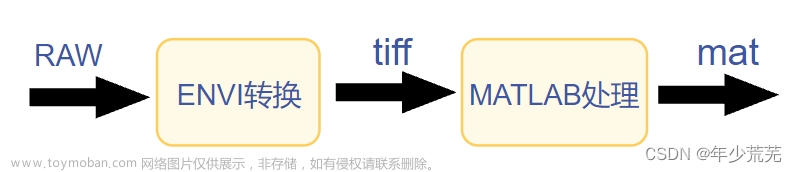
第④步 将xml文件转化为txt文件
由于YOLO只能识别txt文件,所以我们需要做进一步的转化。
新建文件,复制下面的代码:
import xml.etree.ElementTree as ET
import os
from os import getcwd
import glob
# 1.
# 自己创建文件夹,例如:label_mal label_txt 也可以修改别的
image_set = 'Annotations2' # 需要转换的文件夹名称(文件夹内放xml标签文件)
imageset2 = 'MSCOCO_train_txt' # 保存txt的文件夹
# 2.
# 换成你的类别 当前的顺序,就txt 0,1,2,3 四个类别
classes = ['car'] # 标注时的标签 注意顺序一定不要错。
# 3.
# # 转换文件夹的绝对路径
# data_dir = 'D:/detectAuto_/data'
# 或者 读取当前路径
data_dir = getcwd() # 当前路径
'''
xml中框的左上角坐标和右下角坐标(x1,y1,x2,y2)
》》txt中的中心点坐标和宽和高(x,y,w,h),并且归一化
'''
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(data_dir, imageset1, imageset2, image_id):
in_file = open(data_dir + '/%s/%s.xml' % (imageset1, image_id),encoding='UTF-8') # 读取xml
out_file = open(data_dir + '/%s/%s.txt' % (imageset2, image_id), 'w',encoding='UTF-8') # 保存txt
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls) # 获取类别索引
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str('%.6f' % a) for a in bb]) + '\n')
image_ids = []
for x in glob.glob(data_dir + '/%s' % image_set + '/*.xml'):
image_ids.append(os.path.basename(x)[:-4])
print('\n%s数量:' % image_set, len(image_ids)) # 确认数量
i = 0
for image_id in image_ids:
i = i + 1
convert_annotation(data_dir, image_set, imageset2, image_id)
print("%s 数据:%s/%s文件完成!" % (image_set, i, len(image_ids)))
print("Done!!!")
这两处根据自己的文件名和类别名进行修改

然后运行

这样就完成了转化,我们就获得了txt文件

最后将它们合在一起,就构成了我们经过数据增强之后新的数据集啦!

有很多小伙伴在应用时遇到了不同的问题,大家可以在评论区找找答案~
需要完整项目可直接下载资源:
【免费】YOLO数据集数据增强代码资源-CSDN文库
🌟本人YOLOv5系列导航
 🍀YOLOv5源码详解系列:
🍀YOLOv5源码详解系列:
YOLOv5源码逐行超详细注释与解读(1)——项目目录结构解析
YOLOv5源码逐行超详细注释与解读(2)——推理部分detect.py
YOLOv5源码逐行超详细注释与解读(3)——训练部分train.py
YOLOv5源码逐行超详细注释与解读(4)——验证部分val(test).py
YOLOv5源码逐行超详细注释与解读(5)——配置文件yolov5s.yaml
YOLOv5源码逐行超详细注释与解读(6)——网络结构(1)yolo.py
YOLOv5源码逐行超详细注释与解读(7)——网络结构(2)common.py
🍀YOLOv5入门实践系列:
YOLOv5入门实践(1)——手把手带你环境配置搭建
YOLOv5入门实践(2)——手把手教你利用labelimg标注数据集
YOLOv5入门实践(3)——手把手教你划分自己的数据集
YOLOv5入门实践(4)——手把手教你训练自己的数据集
YOLOv5入门实践(5)——从零开始,手把手教你训练自己的目标检测模型(包含pyqt5界面)
🍀YOLOv5改进系列:
YOLOv5改进系列(0)——重要性能指标与训练结果评价及分析
YOLOv5改进系列(1)——添加SE注意力机制
YOLOv5改进系列(2)——添加CBAM注意力机制
YOLOv5改进系列(3)——添加CA注意力机制
YOLOv5改进系列(4)——添加ECA注意力机制
YOLOv5改进系列(5)——替换主干网络之 MobileNetV3
YOLOv5改进系列(6)——替换主干网络之 ShuffleNetV2
YOLOv5改进系列(7)——添加SimAM注意力机制
YOLOv5改进系列(8)——添加SOCA注意力机制
YOLOv5改进系列(9)——替换主干网络之EfficientNetv2
YOLOv5改进系列(10)——替换主干网络之GhostNet
YOLOv5改进系列(11)——添加损失函数之EIoU、AlphaIoU、SIoU、WIoU
YOLOv5改进系列(12)——更换Neck之BiFPN
YOLOv5改进系列(13)——更换激活函数之SiLU,ReLU,ELU,Hardswish,Mish,Softplus,AconC系列等
YOLOv5改进系列(14)——更换NMS(非极大抑制)之 DIoU-NMS、CIoU-NMS、EIoU-NMS、GIoU-NMS 、SIoU-NMS、Soft-NMS
YOLOv5改进系列(15)——增加小目标检测层
YOLOv5改进系列(16)——添加EMA注意力机制(ICASSP2023|实测涨点)
YOLOv5改进系列(17)——更换IoU之MPDIoU(ELSEVIER 2023|超越WIoU、EIoU等|实测涨点)
YOLOv5改进系列(18)——更换Neck之AFPN(全新渐进特征金字塔|超越PAFPN|实测涨点)
YOLOv5改进系列(19)——替换主干网络之Swin TransformerV1(参数量更小的ViT模型)
YOLOv5改进系列(20)——添加BiFormer注意力机制(CVPR2023|小目标涨点神器)
YOLOv5改进系列(21)——替换主干网络之RepViT(清华 ICCV 2023|最新开源移动端ViT)
YOLOv5改进系列(22)——替换主干网络之MobileViTv1(一种轻量级的、通用的移动设备 ViT)
YOLOv5改进系列(23)——替换主干网络之MobileViTv2(移动视觉 Transformer 的高效可分离自注意力机制)
YOLOv5改进系列(24)——替换主干网络之MobileViTv3(移动端轻量化网络的进一步升级)
YOLOv5改进系列(25)——添加LSKNet注意力机制(大选择性卷积核的领域首次探索)文章来源:https://www.toymoban.com/news/detail-700452.html
 文章来源地址https://www.toymoban.com/news/detail-700452.html
文章来源地址https://www.toymoban.com/news/detail-700452.html
到了这里,关于YOLO数据集实现数据增强的方法(裁剪、平移 、旋转、改变亮度、加噪声等)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!