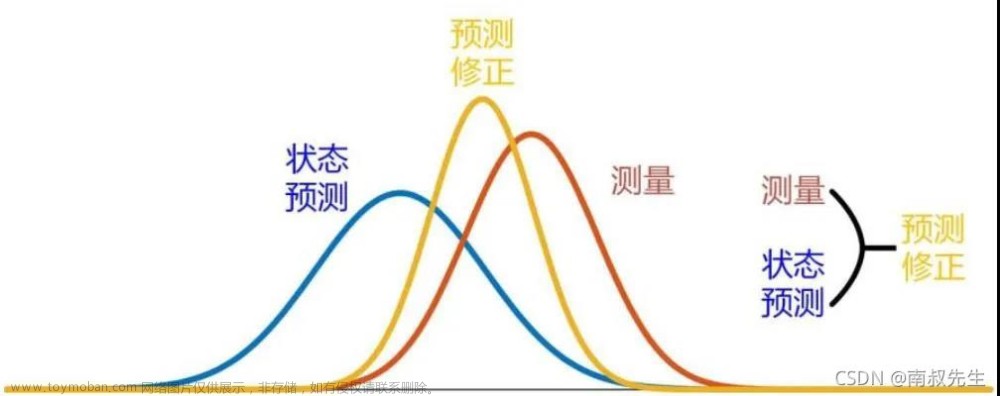
本文是学习记录关于rib源码中使用的kalman滤波,因为整个定位系统存在误差以及不确定性,需要使用kalman滤波进行预测和平滑,在rtklib中使用的是EKF,即扩展kalman滤波,具体关于kalman滤波理论的学习参考这里,同样,本文仅解读代码部分。
首先了解定义函数部分,由于部分定义函数仅适用于矩阵方面,因此将这部分定义函数的解读放在kalman滤波这里。
目录
1、简单矩阵
1.1、mat()
1.2、imat()
1.3、 zero()
1.4、eye()
1.5、dot()
1.6、norm()
1.7、 matcopy()
2、进阶矩阵
2.1、matmul()
2.2、ludcmp()
2.3、lubksb()
2.4、matinv()
2.5、 solve()文章来源:https://www.toymoban.com/news/detail-700853.html
1、简单矩阵
1.1、mat()
创建一个n*m的矩阵 文章来源地址https://www.toymoban.com/news/detail-700853.html
/* new matrix ------------------------------------------------------------------
* allocate memory of matrix
* args : int n,m I number of rows and columns of matrix
* return : matrix pointer (if n<=0 or m<=0, return NULL)
*-----------------------------------------------------------------------------*/
extern double *mat(int n, int m)
{
double *p;
if (n<=0||m<=0) return NULL;//首先判定n和m是否大于0
if (!(p=(double *)malloc(size到了这里,关于RTKLIB软件源码学习(Kalman滤波-矩阵先导)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05](https://imgs.yssmx.com/Uploads/2024/01/805885-1.png)
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-5+6](https://imgs.yssmx.com/Uploads/2024/01/809496-1.png)
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4](https://imgs.yssmx.com/Uploads/2024/01/808512-1.png)