STM32读取24位模数转换(24bit ADC)芯片ADS1231数据
ADS1231是一款TI公司出品的24位ADC芯片,常用于与称重传感器配合实现体重计的应用。这里介绍STM32读取ADS1231的电路和代码实现。ADS1231的特点为通过硬件管脚可控制两种采样速率(10SPS和80SPS),及可以控制芯片上下电以实现低功耗过程控制。
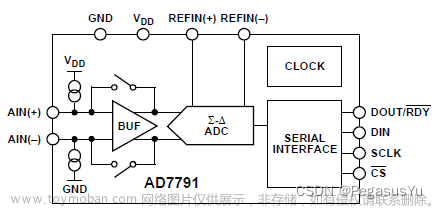
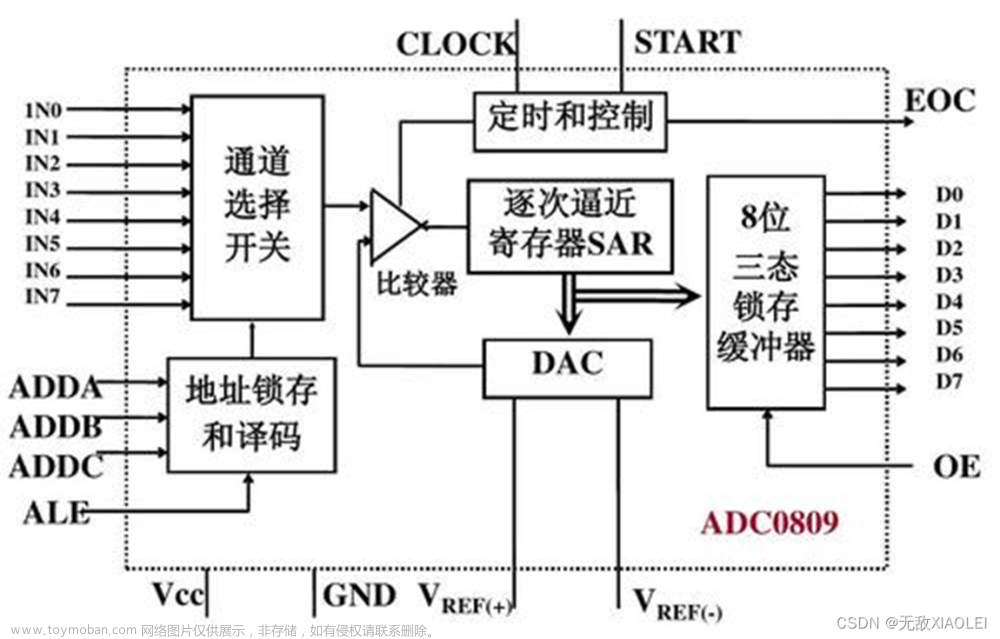
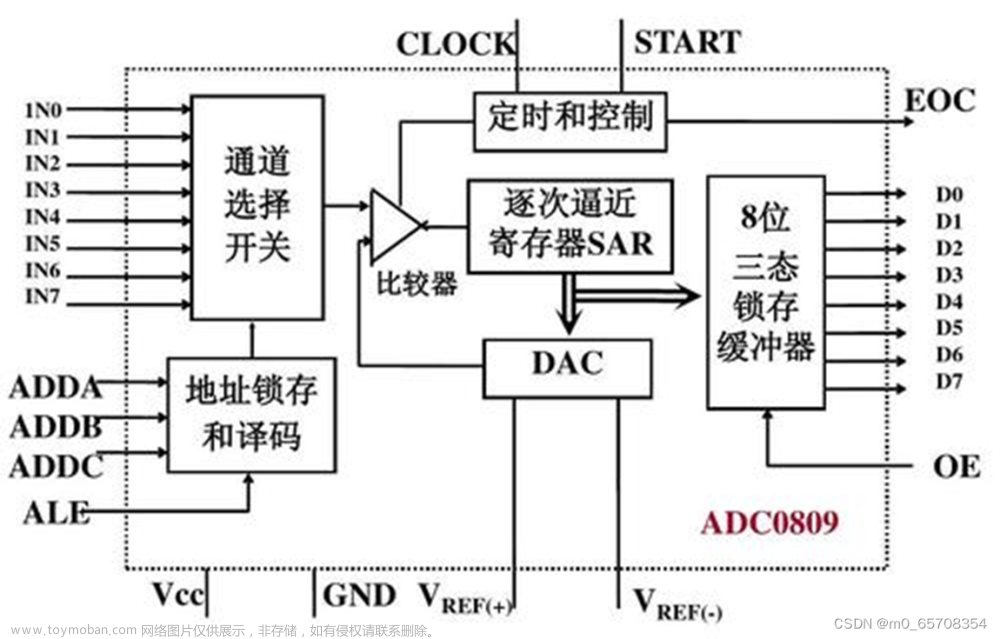
ADS1231的内部原理如下图所示(固定128倍输入信号放大增益):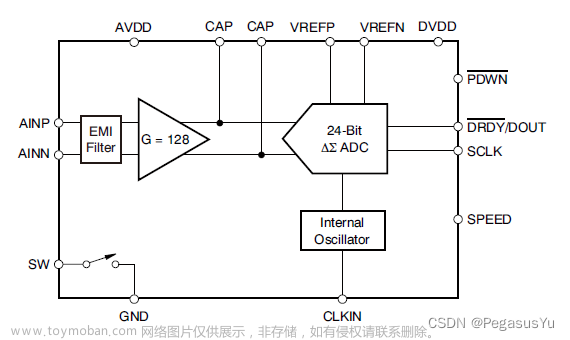
STM32电路连接
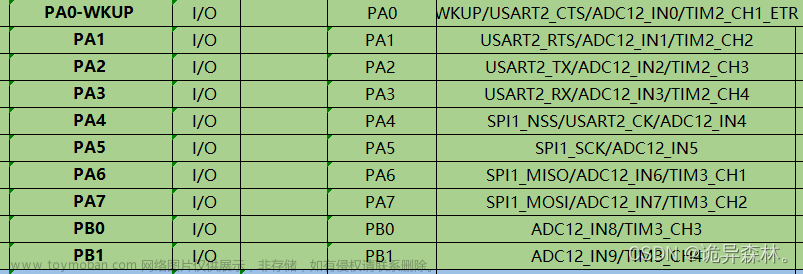
ADS1231与STM32的连接关系设计如下图所示: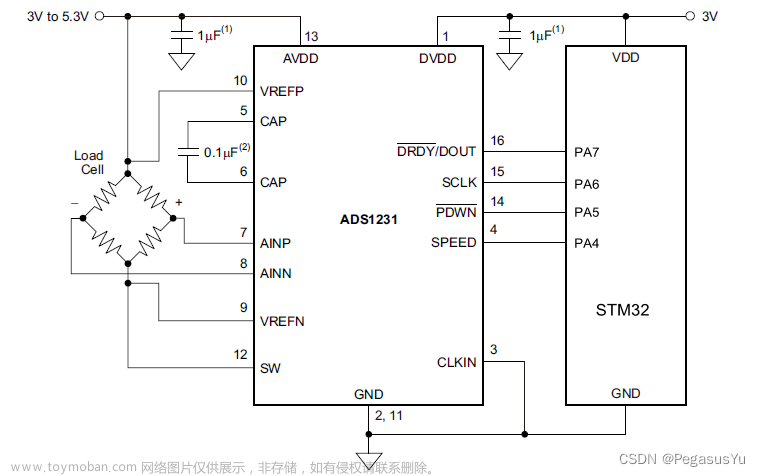
ADS1231的采样模拟接口可以工作在和数字接口不同的电压,如模拟供电 AVDD采用 5V,数字供电采用3.3V,从而与STM32的接口直接连接即可。
ADS1231测试电路
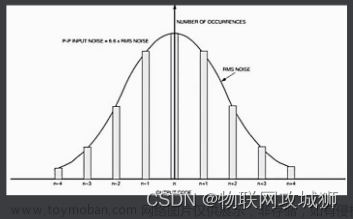
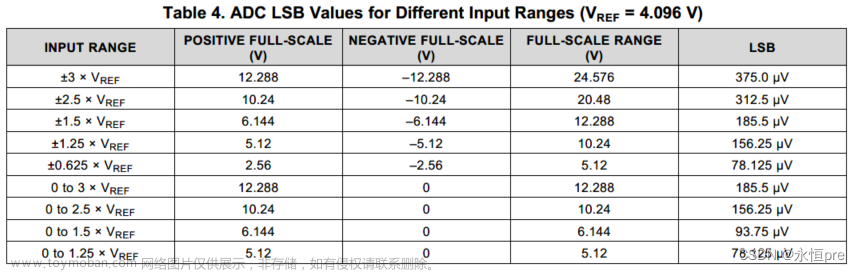
ADS1231典型的应用连接到惠斯通电桥,接收差分电压,由于内部已固定为128倍信号放大,所以对于5V供电(AVDD),最大检测差分电压范围为±20mV。需要注意输入差分信号有共模电压范围要求: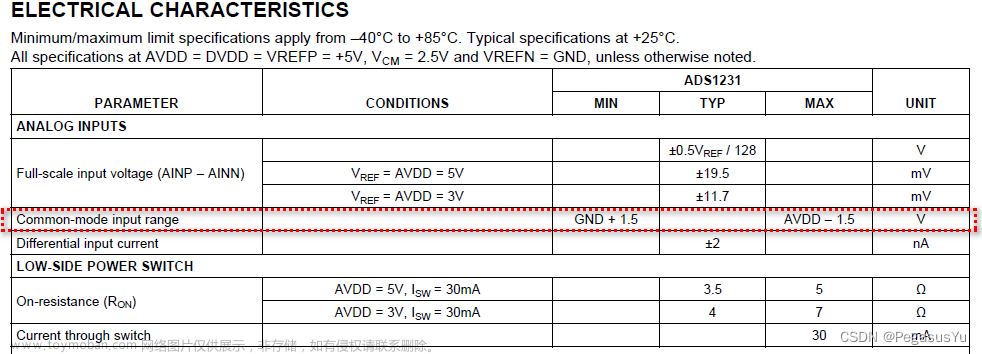
简单测试可以采用如下方式: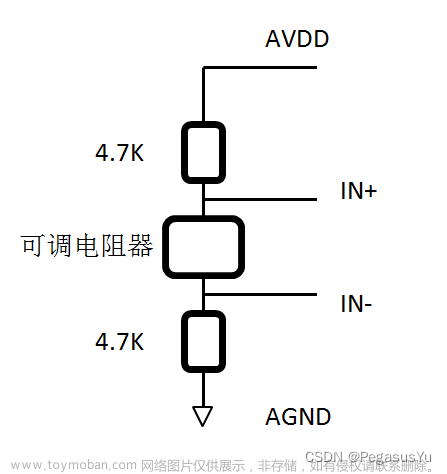
当可调电阻器为10欧姆时,IN+和IN-差分电压为(5/(4700+4700+10))*10 = 5.31mV。而IN-端电压为2.49734V,IN+端电压为2.50265V,共模和差模电压都在手册电气范围内,可以微调可调电位器的阻值,调整输出差模电压。
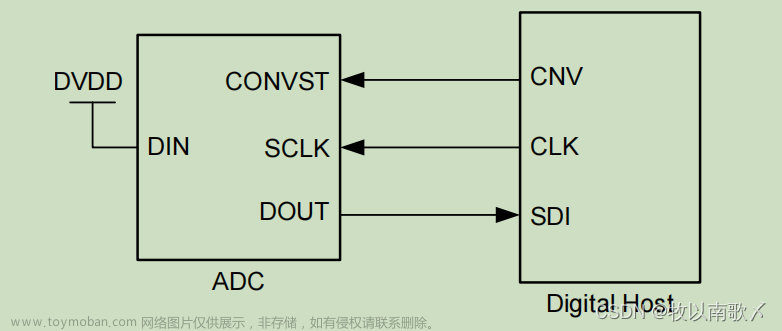
ADS1231访问协议
ADS1231可以通过硬件管脚SPEED控制采样速率, 及通过/PWRDONW管脚控制芯片上下电: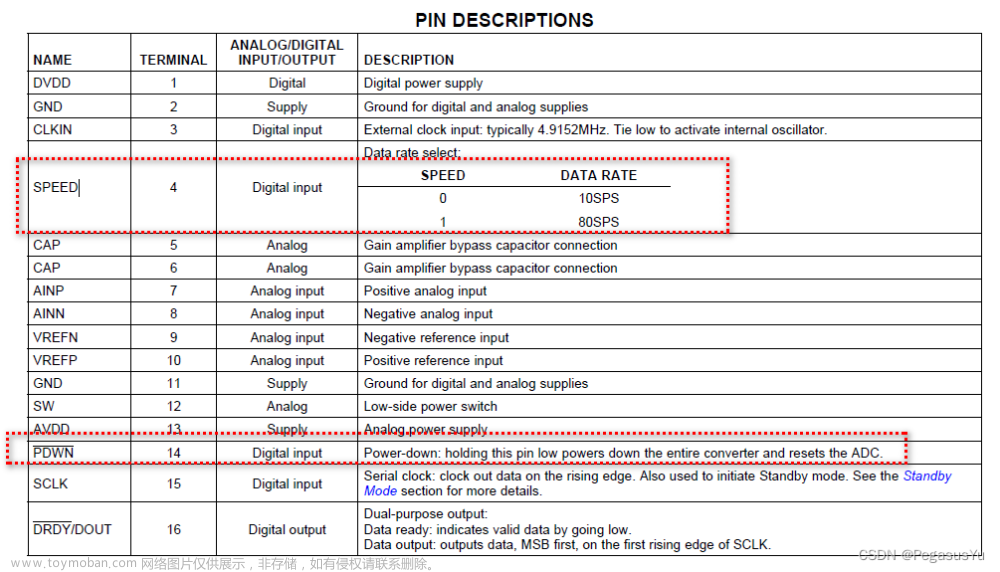
读取数据的时序则为:
- 检测nRDY管脚(也是Dout管脚)状态,如为低电平则可以读取数据,如为高电平则不能读取数据 ;
- 当数据可读取时, 发送24个时钟,并在每个时钟的下降沿获得采样数据的24位中的各个位,高位优先接收到
- 24个时钟之后,多发一个时钟,使得nRDY管脚回到输出高电平状态,在下一次数据可读取时,ADS1231会将信号拉低
STM32工程配置
这里采用STM32G031F8P6和STM32CUBEIDE开发环境,实现ADS1231的ADC数据读取。
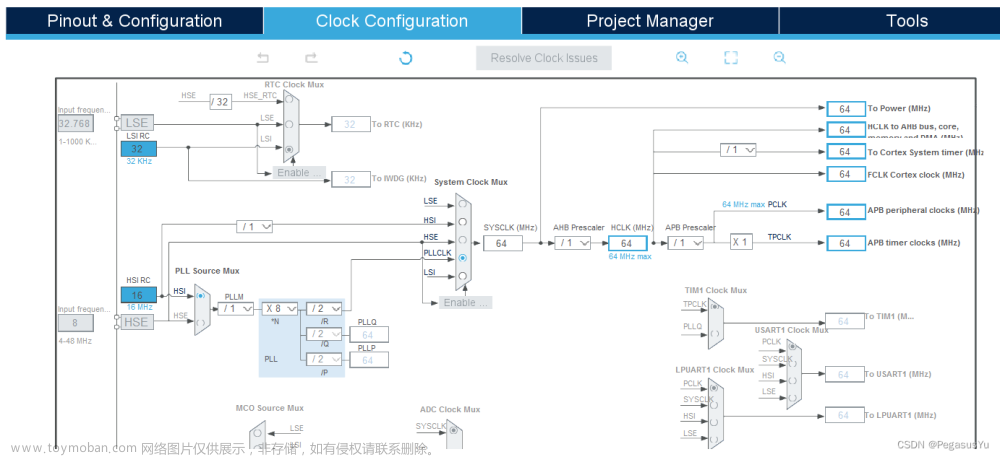
首先配置基本工程和时钟系统: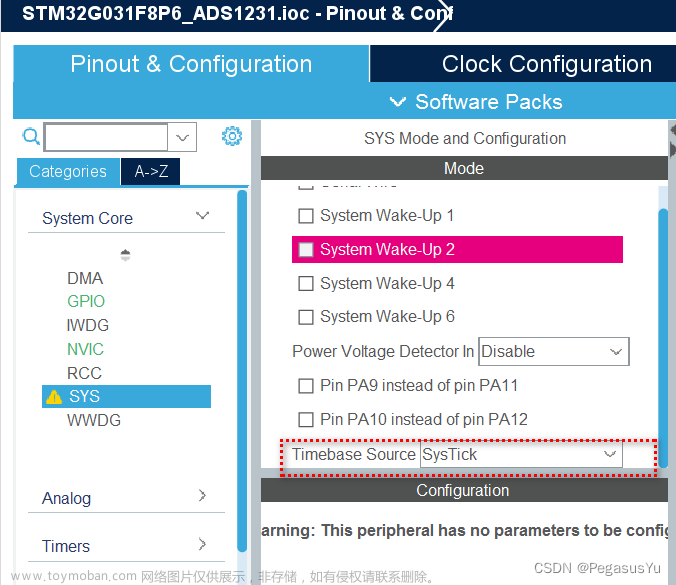
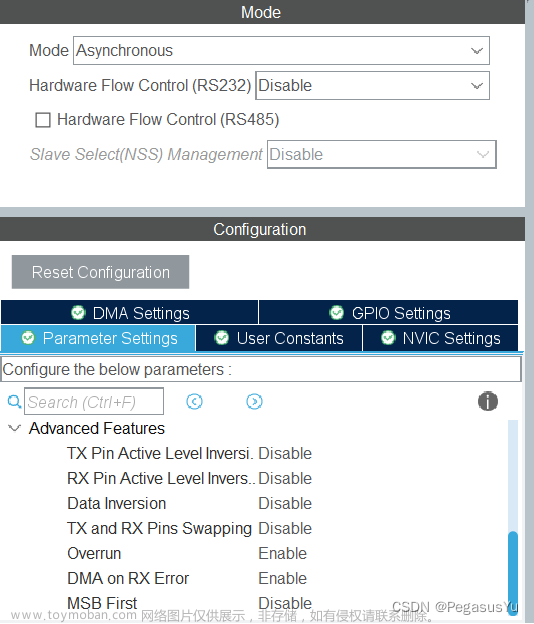
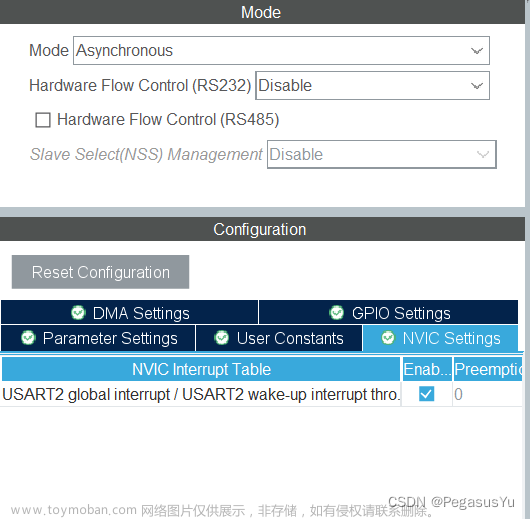
配置UART2作为通讯口。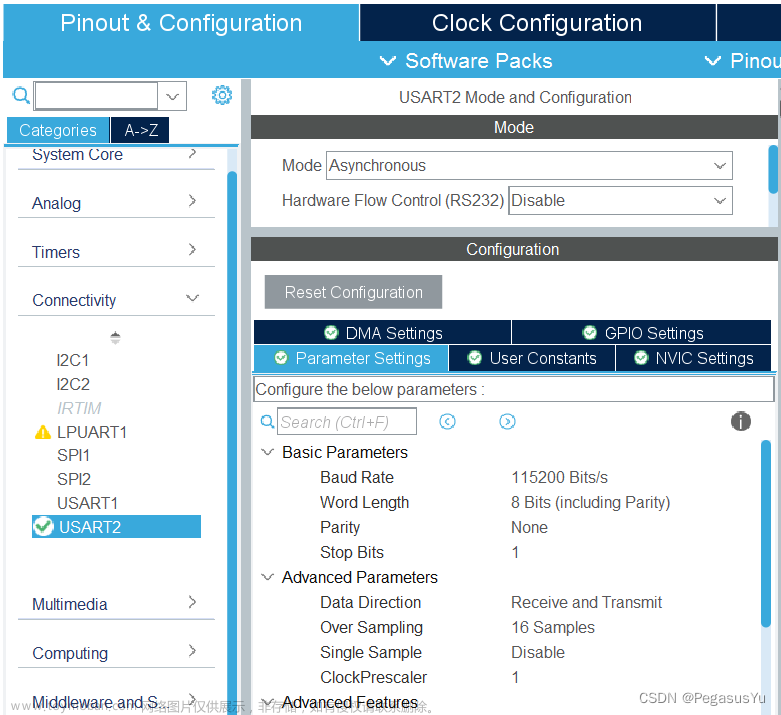
配置与ADS1231连接的4个管脚: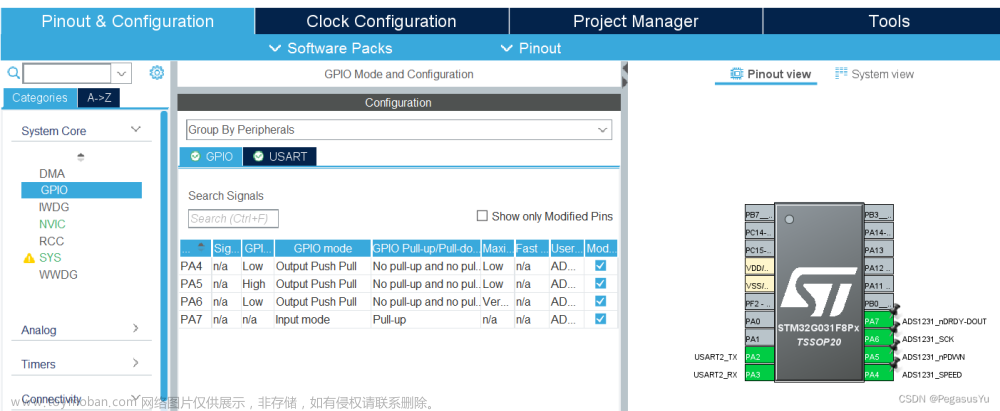
保存并生成初始工程代码: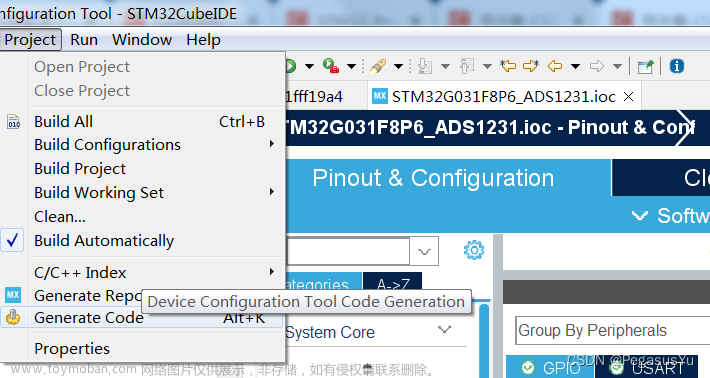
STM32工程代码
代码主要实现微秒级的时序控制,采用的微秒延时函数参考: STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
测试逻辑采用以下方式:
- 串口收到0x01命令,进行10Hz输出测试
- 串口收到0x02命令,进行80Hz输出测试
main.c文件完整代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
#define ads1231_rdy (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7)==0)?1:0
#define ads1231_clk_h HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_SET)
#define ads1231_clk_l HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_RESET)
#define ads1231_dout HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7)
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t cmd=0;
uint32_t ads1231_data;
uint32_t counter=0;
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
//hardware reset of ADS1231
HAL_GPIO_WritePin(ADS1231_nPDWN_GPIO_Port, ADS1231_nPDWN_Pin, GPIO_PIN_RESET);
PY_Delay_us_t(1000000);
HAL_GPIO_WritePin(ADS1231_nPDWN_GPIO_Port, ADS1231_nPDWN_Pin, GPIO_PIN_SET);
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_RXNE);
HAL_UART_Receive_IT(&huart2, (uint8_t *)&cmd, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(cmd==0x01) //10SPS
{
HAL_GPIO_WritePin(ADS1231_SPEED_GPIO_Port, ADS1231_SPEED_Pin, GPIO_PIN_RESET);
while(ads1231_rdy) PY_Delay_us_t(1);
while(!ads1231_rdy) PY_Delay_us_t(1);
ads1231_data = 0;
PY_Delay_us_t(1);
for(uint8_t i=1;i<=24;i++)
{
ads1231_clk_h;
PY_Delay_us_t(1);
ads1231_clk_l;
ads1231_data |= (ads1231_dout<<(24-i));
PY_Delay_us_t(1);
}
ads1231_clk_h;
PY_Delay_us_t(1);
ads1231_clk_l;
PY_Delay_us_t(1);
HAL_UART_Transmit(&huart2, &ads1231_data, 3, 2700);
counter++;
if(counter%10==0) PY_Delay_us_t(1000000);
}
if(cmd==0x02) //80SPS
{
HAL_GPIO_WritePin(ADS1231_SPEED_GPIO_Port, ADS1231_SPEED_Pin, GPIO_PIN_SET);
while(ads1231_rdy) PY_Delay_us_t(1);
while(!ads1231_rdy) PY_Delay_us_t(1);
ads1231_data = 0;
PY_Delay_us_t(1);
for(uint8_t i=1;i<=24;i++)
{
ads1231_clk_h;
PY_Delay_us_t(1);
ads1231_clk_l;
ads1231_data |= (ads1231_dout<<(24-i));
PY_Delay_us_t(1);
}
ads1231_clk_h;
PY_Delay_us_t(1);
ads1231_clk_l;
PY_Delay_us_t(1);
HAL_UART_Transmit(&huart2, &ads1231_data, 3, 2700);
counter++;
if(counter%80==0) PY_Delay_us_t(1000000);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSIDiv = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV1;
RCC_OscInitStruct.PLL.PLLN = 8;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart2.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, ADS1231_SPEED_Pin|ADS1231_SCK_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(ADS1231_nPDWN_GPIO_Port, ADS1231_nPDWN_Pin, GPIO_PIN_SET);
/*Configure GPIO pins : ADS1231_SPEED_Pin ADS1231_nPDWN_Pin */
GPIO_InitStruct.Pin = ADS1231_SPEED_Pin|ADS1231_nPDWN_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : ADS1231_SCK_Pin */
GPIO_InitStruct.Pin = ADS1231_SCK_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(ADS1231_SCK_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : ADS1231_nDRDY_DOUT_Pin */
GPIO_InitStruct.Pin = ADS1231_nDRDY_DOUT_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(ADS1231_nDRDY_DOUT_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle)
{
HAL_UART_Receive_IT(&huart2, (uint8_t *)&cmd, 1);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
代码实现十六进制数据输出,如果要切换为串口printf打印输出,可以参考:
STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
输出的24位数据为补码格式,进行绝对值提取时按照如下规则: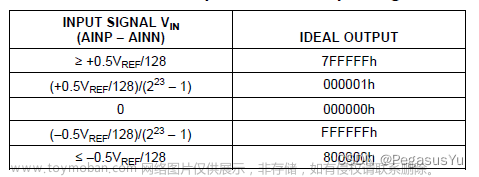
测试效果
串口命令0x01输出(间隔1秒输出10个采样值):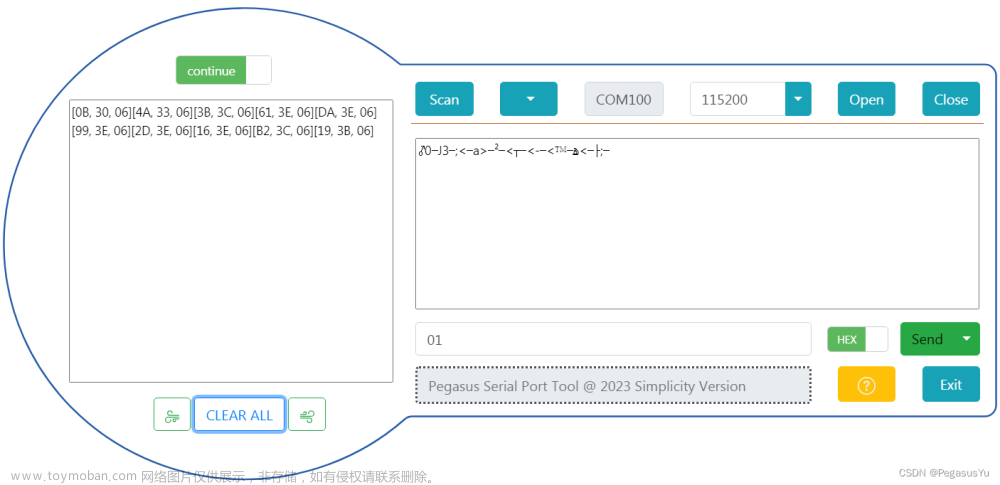
串口命令0x02输出(间隔1秒输出80个采样值):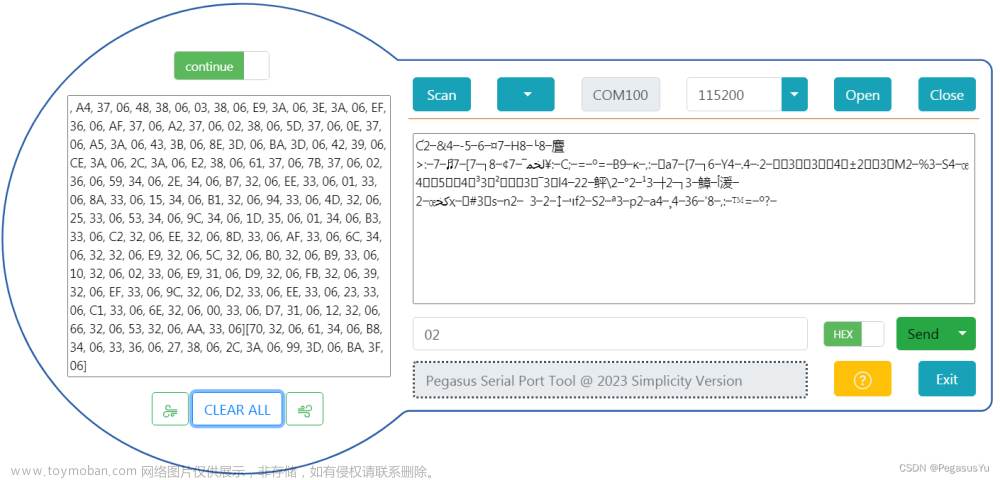
例程下载
STM32G031F8P6-ADS1231例程文章来源:https://www.toymoban.com/news/detail-700942.html
–End–文章来源地址https://www.toymoban.com/news/detail-700942.html
到了这里,关于STM32读取24位模数转换(24bit ADC)芯片ADS1231数据的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!