目录
1. 测速模块介绍
2. 测试原理和单位换算
3. 定时器和中断实现测速开发和调试代码
4. 小车速度显示在OLED屏
1. 测速模块介绍

- 用途:广泛用于电机转速检测,脉冲计数,位置限位等。
- 有遮挡,输出高电平;无遮挡,输出低电平
- 接线 :VCC 接电源正极3.3-5V
- GND 接电源负极 DO TTL开关信号输出
- AO 此模块不起作用
2. 测试原理和单位换算
- 轮子走一圈,经过一个周长,C = 2x3.14x半径= 3.14 x 直径(6.5cm)
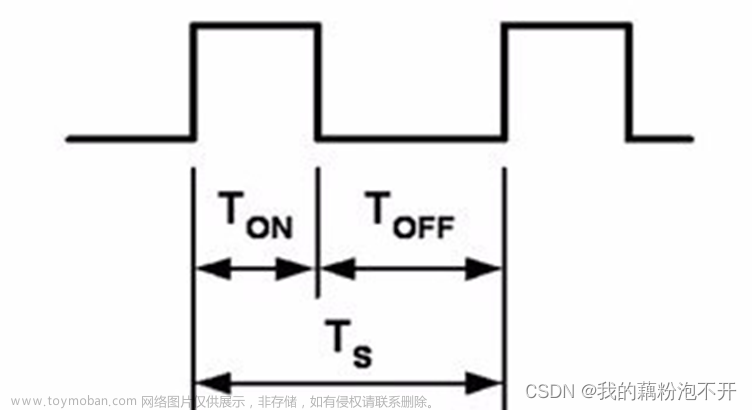
- 对应的码盘也转了一圈,码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平), 那么一个脉冲就是走了 3.14 * 6.5 cm /20 = 1.0205CM
- 定时器可以设计成一秒,统计脉冲数,一个脉冲就是1cm
- 假设一秒有80脉冲,那么就是80cm/s
3. 定时器和中断实现测速开发和调试代码
定时器介绍:
- C51中的定时器和计数器是同一个硬件电路支持的,通过寄存器配置不同,就可以将他当做定时器 或者计数器使用。
- 确切的说,定时器和计数器区别是致使他们背后的计数存储器加1的信号不同。当配置为定时器使 用时,每经过1个机器周期,计数存储器的值就加1。而当配置为计数器时,每来一个负跳变信号 (信号从P3.4 或者P3.5引脚输入),就加1,以此达到计数的目的。
- 标准C51有2个定时器/计数器:T0和T1。他们的使用方法一致。C52相比C51多了一个T2
中断寄存器介绍:

CPU能响应定时器0中断的条件:需要配置IE寄存器的bit1: ET0 bit7:EA
- 1. ET0中断允许要置一 ET0 = 1
- 2. EA总中断要置一 EA = 1
测试数据通过串口发送到上位机
//main.c
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "time.h"
#include "stdio.h"
sbit speedIO = P3^2;//外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed;//速度
extern char signal; //主程序发速度数据的通知
char speedMes[24]; //主程序发送速度数据的字符串缓冲区
void Ex0Init()
{
EX0 = 1;//允许中断
//EA = 1;在串口初始化函数中已经打开了总中断
IT0 = 1;//外部中断的下降沿触发
}
void main()
{
Time0Init();//定时器0初始化
UartInit();//串口相关初始化
//外部中断初始化
Ex0Init();
while(1){
if(signal){//定时器1s到点,把signal置一,主程序发送速度
sprintf(speedMes,"speed:%d cm/s",speed);//串口数据的字符串拼装,speed是格子,每个格子1cm
SendString(speedMes);//速度发出去
signal = 0;//清0speed,下次由定时器1s后的中断处理中再置一
}
}
}
void speedHandler() interrupt 0 //外部中断处理函数
{
speedCnt++;//码盘转动了一个格子
}
//uart.c
#include "reg52.h"
#include "motor.h"
#include "string.h"
sbit D5 = P3^7;
#define SIZE 12
sfr AUXR = 0x8E;
char buffer[SIZE];
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x50; //配置串口工作方式1,REN使能接收
TMOD &= 0x0F;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
EA = 1;//开启总中断
ES = 1;//开启串口中断
}
void SendByte(char mydata)
{
SBUF = mydata;
while(!TI);
TI = 0;
}
void SendString(char *str)
{
while(*str != '\0'){
SendByte(*str);
str++;
}
}
//M1qian M2 hou M3 zuo M4 you
void Uart_Handler() interrupt 4
{
static int i = 0;//静态变量,被初始化一次
char tmp;
if(RI)//中断处理函数中,对于接收中断的响应
{
RI = 0;//清除接收中断标志位
tmp = SBUF;
if(tmp == 'M'){
i = 0;
}
buffer[i++] = tmp;
//灯控指令
if(buffer[0] == 'M'){
switch(buffer[1]){
case '1':
goForward();
break;
case '2':
goBack();
break;
case '3':
goLeft();
break;
case '4':
goRight();
break;
default:
stop();
break;
}
}
if(i == 12) {
memset(buffer, '\0', SIZE);
i = 0;
}
}
}
//motor.c
#include "reg52.h"
sbit RightCon1A = P3^7;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void goForward()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 1;
}
void goRight()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 0;
}
void goLeft()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 1;
}
void goBack()
{
LeftCon1A = 1;
LeftCon1B = 0;
RightCon1A = 1;
RightCon1B = 0;
}
void stop()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 0;
}
//time.c
#include "motor.h"
#include "reg52.h"
extern unsigned int speedCnt;
unsigned int speed;
char signal = 0;
unsigned int cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
if(cnt == 2000){//爆表2000次,经过了1s
signal = 1;
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
//计算小车的速度,也就是拿到speedCnt的值
speed = speedCnt;
speedCnt = 0;//1秒后拿到speedCnt个格子,就能算出这1s的速度,格子清零
}
}
4. 小车速度显示在OLED屏
使用oled模块,oled写命令

写命令/数据的代码分析:文章来源:https://www.toymoban.com/news/detail-702397.html
- /* 1. start()
- 2. 写入 b0111 1000 0x78
- 3. ACK
- 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
- 5. ACK
- 6. 写入指令/数据
- 7. ACK
- 8. STOP */
最终小车代码整合:文章来源地址https://www.toymoban.com/news/detail-702397.html
//main.c
#include "reg52.h"
#include "intrins.h"
#include "Oled.h"
void main()
{
//1. OLED初始化
Oled_Init();
Oled_Clear();
Oled_Show_Str(2,2,"speed:35cm/s");
while(1);
}
//oled.c
#include "reg52.h"
#include "intrins.h"
#include "Oledfont.h"
sbit scl = P1^2;
sbit sda = P1^3;
void IIC_Start()
{
scl = 0;
sda = 1;
scl = 1;
_nop_();
sda = 0;
_nop_();
}
void IIC_Stop()
{
scl = 0;
sda = 0;
scl = 1;
_nop_();
sda = 1;
_nop_();
}
char IIC_ACK()
{
char flag;
sda = 1;//就在时钟脉冲9期间释放数据线
_nop_();
scl = 1;
_nop_();
flag = sda;
_nop_();
scl = 0;
_nop_();
return flag;
}
void IIC_Send_Byte(char dataSend)
{
int i;
for(i = 0;i<8;i++){
scl = 0;//scl拉低,让sda做好数据准备
sda = dataSend & 0x80;//1000 0000获得dataSend的最高位,给sda
_nop_();//发送数据建立时间
scl = 1;//scl拉高开始发送
_nop_();//数据发送时间
scl = 0;//发送完毕拉低
_nop_();//
dataSend = dataSend << 1;
}
}
void Oled_Write_Cmd(char dataCmd)
{
// 1. start()
IIC_Start();
//
// 2. 写入从机地址 b0111 1000 0x78
IIC_Send_Byte(0x78);
// 3. ACK
IIC_ACK();
// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
IIC_Send_Byte(0x00);
// 5. ACK
IIC_ACK();
//6. 写入指令/数据
IIC_Send_Byte(dataCmd);
//7. ACK
IIC_ACK();
//8. STOP
IIC_Stop();
}
void Oled_Write_Data(char dataData)
{
// 1. start()
IIC_Start();
//
// 2. 写入从机地址 b0111 1000 0x78
IIC_Send_Byte(0x78);
// 3. ACK
IIC_ACK();
// 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
IIC_Send_Byte(0x40);
// 5. ACK
IIC_ACK();
///6. 写入指令/数据
IIC_Send_Byte(dataData);
//7. ACK
IIC_ACK();
//8. STOP
IIC_Stop();
}
void Oled_Init(void){
Oled_Write_Cmd(0xAE);//--display off
Oled_Write_Cmd(0x00);//---set low column address
Oled_Write_Cmd(0x10);//---set high column address
Oled_Write_Cmd(0x40);//--set start line address
Oled_Write_Cmd(0xB0);//--set page address
Oled_Write_Cmd(0x81); // contract control
Oled_Write_Cmd(0xFF);//--128
Oled_Write_Cmd(0xA1);//set segment remap
Oled_Write_Cmd(0xA6);//--normal / reverse
Oled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)
Oled_Write_Cmd(0x3F);//--1/32 duty
Oled_Write_Cmd(0xC8);//Com scan direction
Oled_Write_Cmd(0xD3);//-set display offset
Oled_Write_Cmd(0x00);//
Oled_Write_Cmd(0xD5);//set osc division
Oled_Write_Cmd(0x80);//
Oled_Write_Cmd(0xD8);//set area color mode off
Oled_Write_Cmd(0x05);//
Oled_Write_Cmd(0xD9);//Set Pre-Charge Period
Oled_Write_Cmd(0xF1);//
Oled_Write_Cmd(0xDA);//set com pin configuartion
Oled_Write_Cmd(0x12);//
Oled_Write_Cmd(0xDB);//set Vcomh
Oled_Write_Cmd(0x30);//
Oled_Write_Cmd(0x8D);//set charge pump enable
Oled_Write_Cmd(0x14);//
Oled_Write_Cmd(0xAF);//--turn on oled panel
}
void Oled_Clear()
{
unsigned char i,j; //-128 --- 127
for(i=0;i<8;i++){
Oled_Write_Cmd(0xB0 + i);//page0--page7
//每个page从0列
Oled_Write_Cmd(0x00);
Oled_Write_Cmd(0x10);
//0到127列,依次写入0,每写入数据,列地址自动偏移
for(j = 0;j<128;j++){
Oled_Write_Data(0);
}
}
}
void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2
unsigned int i;
Oled_Write_Cmd(0xb0+(row*2-2)); //page 0
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
Oled_Write_Cmd(0xb0+(row*2-1)); //page 1
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
}
/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){
while(*str!=0){
Oled_Show_Char(row,col,*str);
str++;
col += 8;
}
}
到了这里,关于智能小车之测速小车原理和开发的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!