硬件:STM32F103ZET6、ST-LINK、usb转串口工具、4个LED灯、1个蜂鸣器、4个1k电阻、2个按键、面包板、杜邦线
前言
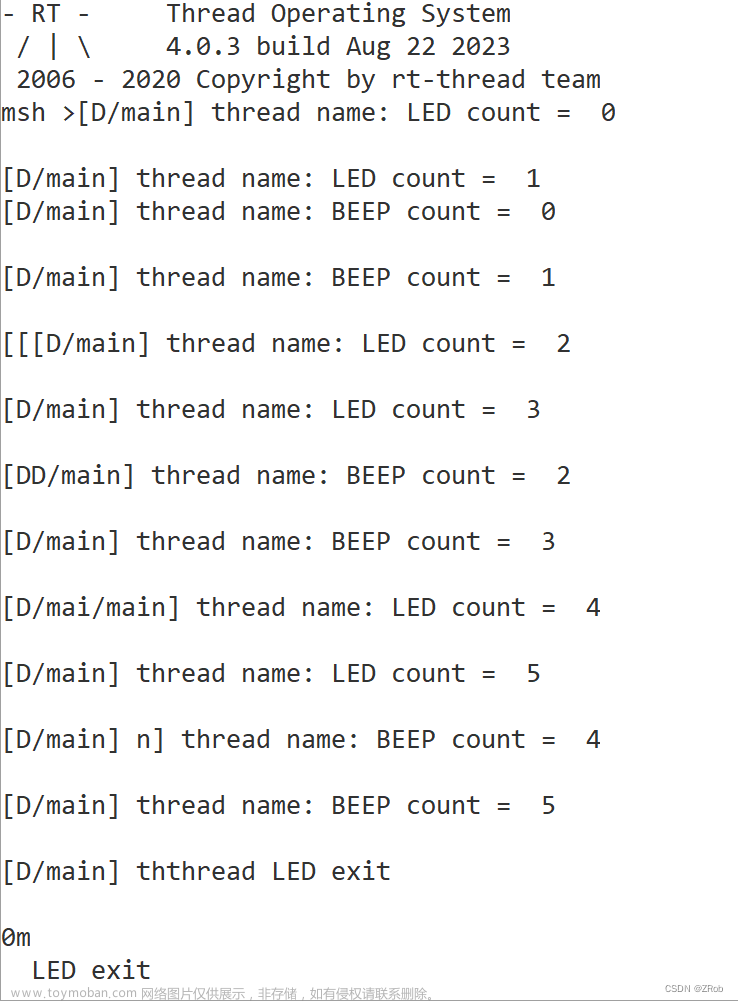
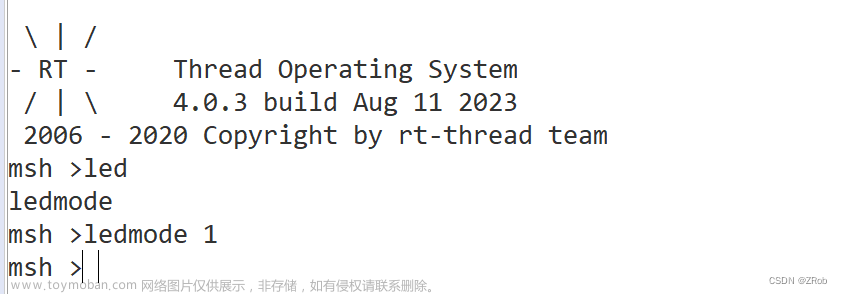
利用RT_Thread操作系统实现三种不同的LED等闪烁
提示:以下是本篇文章正文内容,下面案例可供参考
一、cubemx配置
cubemx配置参考教程:
基于 CubeMX 移植 RT-Thread Nano
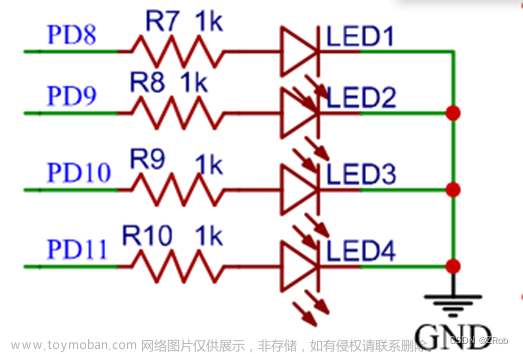
后面程序所需的引脚
二、board.c文件修改
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-05-24 the first version
*/
#include <rthw.h>
#include <rtthread.h>
#include "main.h"
#include "usart.h"// 使用cubemx产生的MX_USART1_UART_Init()
#include "gpio.h" // 使用cubemx产生的MX_GPIO_Init()
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/*
* Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP
* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes
*/
#define RT_HEAP_SIZE (15*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
void SysTick_Handler(void)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
extern void SystemClock_Config(void);
HAL_Init();
SystemClock_Config();
SystemCoreClockUpdate();
/*
* 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
MX_GPIO_Init();//【增加】
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
#ifdef RT_USING_CONSOLE
static UART_HandleTypeDef UartHandle;
static int uart_init(void)
{
/* TODO: Please modify the UART port number according to your needs */
UartHandle.Instance = USART1;//【修改为USART1】
UartHandle.Init.BaudRate = 115200;
UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
UartHandle.Init.StopBits = UART_STOPBITS_1;
UartHandle.Init.Parity = UART_PARITY_NONE;
UartHandle.Init.Mode = UART_MODE_TX_RX;
UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
UartHandle.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&UartHandle) != HAL_OK)
{
while (1);
}
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
rt_size_t i = 0, size = 0;
char a = '\r';
__HAL_UNLOCK(&UartHandle);
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if (*(str + i) == '\n')
{
HAL_UART_Transmit(&UartHandle, (uint8_t *)&a, 1, 1);
}
HAL_UART_Transmit(&UartHandle, (uint8_t *)(str + i), 1, 1);
}
}
#endif
#ifdef RT_USING_FINSH
char rt_hw_console_getchar(void)
{
/* Note: the initial value of ch must < 0 */
int ch = -1;
if (__HAL_UART_GET_FLAG(&UartHandle, UART_FLAG_RXNE) != RESET)
{
ch = UartHandle.Instance->DR & 0xff;
}
else
{
rt_thread_mdelay(10);
}
return ch;
}
#endif
2.rtconfig.h文件修改
RT-Thread Nano 的配置在 rtconfig.h 中进行,通过开关宏定义来使能或关闭某些功能,接下来对该配置文件中的宏定义进行说明。文章来源:https://www.toymoban.com/news/detail-703132.html
/* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
// <<< Use Configuration Wizard in Context Menu >>>
// <h>Basic Configuration
// <o>Maximal level of thread priority <8-256>
// <i>Default: 32
#define RT_THREAD_PRIORITY_MAX 32
// <o>OS tick per second
// <i>Default: 1000 (1ms)
#define RT_TICK_PER_SECOND 1000
// <o>Alignment size for CPU architecture data access
// <i>Default: 4
#define RT_ALIGN_SIZE 4
// <o>the max length of object name<2-16>
// <i>Default: 8
#define RT_NAME_MAX 8
// <c1>Using RT-Thread components initialization
// <i>Using RT-Thread components initialization
#define RT_USING_COMPONENTS_INIT
// </c>
// <c1>Using user main
// <i>Using user main
#define RT_USING_USER_MAIN
// </c>
// <o>the size of main thread<1-4086>
// <i>Default: 512
#define RT_MAIN_THREAD_STACK_SIZE 1024
// </h>
// <h>Debug Configuration
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// <h>Hook Configuration
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// <h>Software timers Configuration
// <c1> Enables user timers
// <i> Enables user timers
//#define RT_USING_TIMER_SOFT
// </c>
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// </h>
// <h>IPC(Inter-process communication) Configuration
// <c1>Using Semaphore
// <i>Using Semaphore
#define RT_USING_SEMAPHORE
// </c>
// <c1>Using Mutex
// <i>Using Mutex
//#define RT_USING_MUTEX
// </c>
// <c1>Using Event
// <i>Using Event
//#define RT_USING_EVENT
// </c>
// <c1>Using MailBox
// <i>Using MailBox
//#define RT_USING_MAILBOX
// </c>
// <c1>Using Message Queue
// <i>Using Message Queue
//#define RT_USING_MESSAGEQUEUE
// </c>
// </h>
// <h>Memory Management Configuration
// <c1>Using Mempool Management
// <i>Using Mempool Management
//#define RT_USING_MEMPOOL
// </c>
// <c1>Dynamic Heap Management
// <i>Dynamic Heap Management
#define RT_USING_HEAP//是否使用 内存堆
// </c>
// <c1>using small memory
// <i>using small memory
#define RT_USING_SMALL_MEM// 是否使用 内存堆
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE
// </c>
// </h>
// <h>Console Configuration
// <c1>Using console
// <i>Using console
#define RT_USING_CONSOLE
// </c>
// <o>the buffer size of console <1-1024>
// <i>the buffer size of console
// <i>Default: 128 (128Byte)
#define RT_CONSOLEBUF_SIZE 128
// </h>
// <h>Enable FinSH Configuration
// <c1>include shell config
// <i> Select this choice if you using FinSH
//当系统加入 FinSH 组件源码后,需要在 rtconfig.h 中开启以下项
#include "finsh_config.h"
// </c>
// </h>
// <h>Device Configuration
// <c1>using device framework
// <i>using device framework
//#define RT_USING_DEVICE
// </c>
// </h>
// <<< end of configuration section >>>
#endif
三、主程序
1. main函数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <rtthread.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 栈空间地址对齐 */
ALIGN( RT_ALIGN_SIZE )
/* 定义一个数组,栈的空间大小就是1024*8字节 */
rt_uint8_t rt_led1_thread_stack[1024];
/* 初始化线程栈 */
struct rt_thread rt_led1_thread;
rt_uint8_t rt_led2_thread_stack[1024];
/* 定义线程控制块指针 */
rt_thread_t rt_led2_thread = RT_NULL;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void led1_thread_entry(void *parameter)
{
while(1)
{
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
rt_thread_mdelay(1000);
}
}
void led2_thread_entry(void *parameter)
{
while(1)
{
HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin);
rt_thread_mdelay(100);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
// SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/**************************** 静态创建 **************************************/
rt_err_t rst_led1;
rst_led1 = rt_thread_init(&rt_led1_thread,
"led1line",
led1_thread_entry,
RT_NULL,
&rt_led1_thread_stack[0],
sizeof(rt_led1_thread_stack),
RT_THREAD_PRIORITY_MAX-2,
20);
if(rst_led1 == RT_EOK)
{
rt_thread_startup(&rt_led1_thread);
}
/***************************** 动态创建 ******************************************/
rt_led2_thread = rt_thread_create( "led2line",
led2_thread_entry,
RT_NULL,
sizeof(rt_led2_thread_stack),
RT_THREAD_PRIORITY_MAX-3,
20);
if( rt_led2_thread != RT_NULL )
/* rt_thread_startup() 的形参是一个线程控制块指针,动态创建线程时返回的就是线程控制块指针,所以直接传入即可 */
rt_thread_startup( rt_led2_thread );
else
return -1;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
rt_thread_mdelay(1000);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
2. task函数
#include "main.h"
#include "rtthread.h"
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#define THREAD1_PRIORITY 27
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
ALIGN(RT_ALIGN_SIZE)
rt_thread_t result = RT_NULL;
static void rt_led1_flash_entry(void *parameter)
{
while(1)
{
HAL_GPIO_WritePin(LED3_GPIO_Port,LED3_Pin,GPIO_PIN_SET);
rt_thread_mdelay(500);
HAL_GPIO_WritePin(LED3_GPIO_Port,LED3_Pin,GPIO_PIN_RESET);
rt_thread_mdelay(500);
}
}
int rt_user_thread_entry(void)
{
result = rt_thread_create("led3line", rt_led1_flash_entry,
NULL,
THREAD_STACK_SIZE,
THREAD1_PRIORITY,
THREAD_TIMESLICE);
if (result != RT_NULL)
{
rt_thread_startup(result);
}
else
{
LOG_D("can not create LED thread!");
return -1;
}
}
INIT_APP_EXPORT(rt_user_thread_entry);
总结
以上便是基于 CubeMX 移植 RT-Thread Nano,然后实现3个不同LED灯的闪烁的程序文章来源地址https://www.toymoban.com/news/detail-703132.html
到了这里,关于【STM32&RT-Thread零基础入门】8. 基于 CubeMX 移植 RT-Thread Nano的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!