1.关键点平移数据增强
# 关键点数据增强
from PIL import Image, ImageDraw
import random
import json
from pathlib import Path
# 创建一个黑色背景图像
width, height = 5000, 5000 # 图像宽度和高度
background_color = (0, 0, 0) # 黑色填充
# 随机分布图像
num_images = 1 # 要随机分布的图像数量
folder_path = Path("E:/2") # 测试图像目录
output_path = Path("E:/5") # 输出图像目录
for file in folder_path.rglob("*.jpg"):
# eg: file = "目录名/123.jpg",file_name = "123.jpg"
file_name = file.name
image_origin = Image.open(file)
width_origin,height_origin = image_origin.size
for _ in range(num_images):
#随机选择图像的位置
x = random.randint(0, width - width_origin)
y = random.randint(0, height - height_origin)
print(x,y)
canvas = Image.new("RGB", (width,height), background_color) #新建一个mask,全黑填充
canvas.paste(image_origin, (x,y)) #将原图从(x,y)处粘贴到mask上
Path.mkdir(output_path, exist_ok=True)
img_name = 'a' + '_' + file_name #改变增强后图片的名字
canvas.save(output_path / img_name)
jsonFile = file.with_suffix(".json")
print(jsonFile)
if Path.exists(jsonFile): #判断图片是否有对应的json文件
print(f"找到{file}的Json文件")
with open(jsonFile, "r", encoding="utf-8") as f:
objectDict = json.load(f)
objectDict["imageData"] = None # 清空json文件里加密的imgdata
objectDict["imageHeight"] = height
objectDict["imageWidth"] = width
json_name = 'a' + '_' + jsonFile.name #改变增强后json文件的名字
for i in range(len(objectDict["shapes"])):
if objectDict["shapes"][i]["shape_type"] in ["rectangle","line"]: #矩形框、线段
objectDict["shapes"][i]['points'][0][0]+=x
objectDict["shapes"][i]['points'][0][1]+=y
objectDict["shapes"][i]['points'][1][0]+=x
objectDict["shapes"][i]['points'][1][1]+=y
if objectDict["shapes"][i]["shape_type"] in ["polygon"]: #多段线
for polygonMat in objectDict["shapes"][i]['points']:
polygonMat[0]+=x
polygonMat[1]+=y
if objectDict["shapes"][i]["shape_type"] in ["point"]: #关键点
objectDict["shapes"][i]['points'][0][0]+=x
objectDict["shapes"][i]['points'][0][1]+=y
with open(output_path / json_name, 'w',encoding='utf-8') as f:
json.dump(objectDict, f)
else:
print("没有Json文件")
2.关键点旋转数据增强
from PIL import Image
import random
import json
from pathlib import Path
import numpy as np
def calc(center, radius):
print(center)
return [[center[0][0] - radius, center[0][1] - radius],
[center[0][0] + radius, center[0][1] + radius]]
folder_path = Path("E:/2") # 原图片和json文件夹目录
output_path = Path("E:\dataset1") # 输出目录(包含img和json)
centerAnno = '6' # 定义圆心标注点,只能有一个
radius = 1430 # 通过radius和圆心centerAnno生成矩形框
for file in folder_path.rglob("*.jpg"):
file_name = file.name
file_name1 = 'r9' + '_' + file_name #改变增强后图片的名字
image_origin = Image.open(file)
width_origin,height_origin = image_origin.size
angle = random.randint(-10, 10) #设置随机旋转范围
print(angle)
rotate_img = image_origin.rotate(angle)
Path.mkdir(output_path, exist_ok=True)
rotate_img.save(output_path / file_name1)
jsonFile = file.with_suffix(".json")
jsonFile1 = 'r9' + '_' + jsonFile.name #改变增强后json文件的名字
print(jsonFile)
if Path.exists(jsonFile):
print(f"找到{file}的Json文件")
with open(jsonFile, "r", encoding="utf-8") as f:
objectDict = json.load(f)
objectDict["imageData"] = None # 清空json文件里加密的imgdata
rad = np.pi / 180 * angle
print(rad)
rot_matrix = np.array([[np.cos(rad), -np.sin(rad)],
[np.sin(rad), np.cos(rad)]])
for shape in objectDict["shapes"]:
if shape["shape_type"] in ["line"]:
x1, y1 = np.dot([shape['points'][0][0] - width_origin /2, shape['points'][0][1] - height_origin /2], rot_matrix)
x2, y2 = np.dot([shape['points'][1][0] - width_origin /2, shape['points'][1][1] - height_origin /2], rot_matrix)
shape['points'][0][0] = x1 + width_origin /2
shape['points'][0][1] = y1 + height_origin /2
shape['points'][1][0] = x2 + width_origin /2
shape['points'][1][1] = y2 + height_origin /2
if shape["shape_type"] in ["polygon"]:
for polygonMat in shape['points']:
x1, y1 = np.dot([polygonMat[0] - width_origin /2, polygonMat[1] - height_origin /2], rot_matrix)
polygonMat[0] = x1 + width_origin /2
polygonMat[1] = y1 + height_origin /2
if shape["shape_type"] in ["point"]:
x1, y1 = np.dot([shape['points'][0][0] - width_origin /2, shape['points'][0][1] - height_origin /2], rot_matrix)
shape['points'][0][0] = x1 + width_origin /2
shape['points'][0][1] = y1 + height_origin /2
# 找到圆心标注框,只能有一个
for shape in objectDict["shapes"]:
if shape["label"] == centerAnno:
centerPoint = shape["points"]
for shape in objectDict["shapes"]:
if shape["shape_type"] == "rectangle":
[shape["points"][0], shape["points"][1]] = calc(centerPoint, radius)
print(centerPoint)
print(shape["points"][0], shape["points"][1])
with open(output_path / jsonFile1, 'w',encoding='utf-8') as f:
json.dump(objectDict, f)
else:
print("没有Json文件")
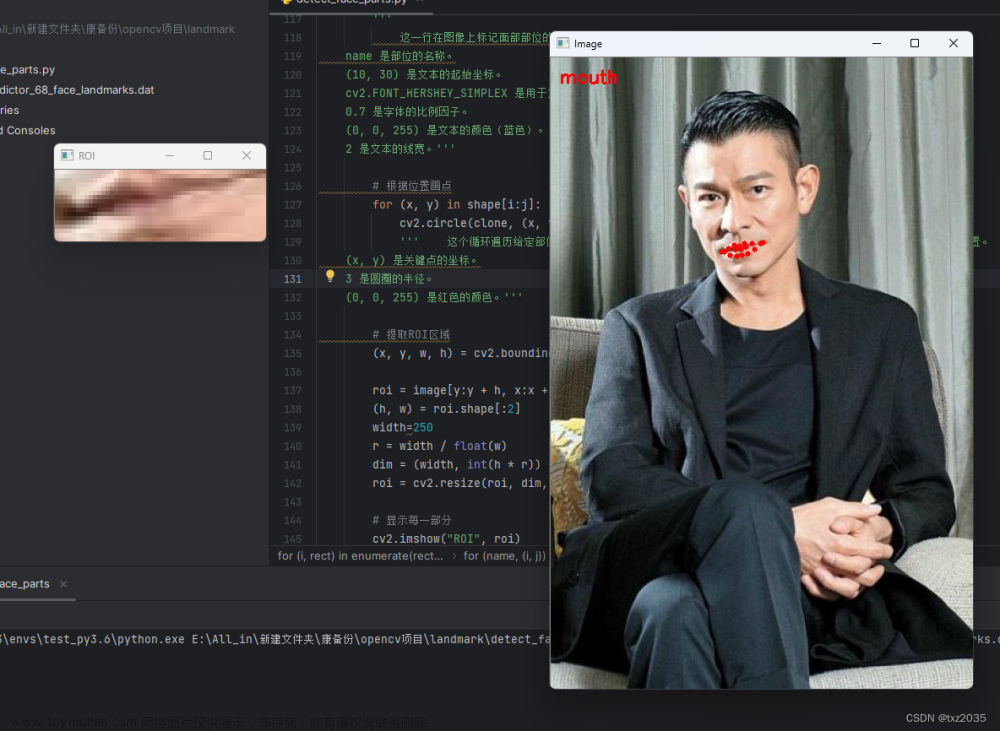
3.关键点可视化
# 可视化关键点位置
import cv2
from pathlib import Path
import json
import matplotlib.pyplot as plt
folder_path = Path("E:/2_1") # 原图及json文件夹
output_path = Path("E:/2_2") # 可视化图片输出文件夹
# 载入图像
for img_path in folder_path.rglob("*.jpg"):
print(img_path)
file_name = img_path.name
img_bgr = cv2.imread(str(img_path))
# 载入labelme格式的json标注文件
labelme_path = img_path.with_suffix(".json")
print(labelme_path)
# labelme_path = 'meter_6_25.json'
with open(labelme_path, 'r', encoding='utf-8') as f:
labelme = json.load(f)
# 查看标注信息 rectangle:矩形 point:点 polygon:多边形
# print(labelme.keys())
# dict_keys(['version', 'flags', 'shapes', 'imagePath', 'imageData', 'imageHeight', 'imageWidth'])
# print(labelme['shapes'])
# <<<<<<<<<<<<<<<<<<可视化框(rectangle)标注>>>>>>>>>>>>>>>>>>>>>
# 框可视化配置
bbox_color = (255, 129, 0) # 框的颜色
bbox_thickness = 5 # 框的线宽
# 框类别文字
bbox_labelstr = {
'font_size':6, # 字体大小
'font_thickness':14, # 字体粗细
'offset_x':0, # X 方向,文字偏移距离,向右为正
'offset_y':-80, # Y 方向,文字偏移距离,向下为正
}
# 画框
for each_ann in labelme['shapes']: # 遍历每一个标注
if each_ann['shape_type'] == 'rectangle': # 筛选出框标注
# 框的类别
bbox_label = each_ann['label']
# 框的两点坐标
bbox_keypoints = each_ann['points']
bbox_keypoint_A_xy = bbox_keypoints[0]
bbox_keypoint_B_xy = bbox_keypoints[1]
# 左上角坐标
bbox_top_left_x = int(min(bbox_keypoint_A_xy[0], bbox_keypoint_B_xy[0]))
bbox_top_left_y = int(min(bbox_keypoint_A_xy[1], bbox_keypoint_B_xy[1]))
# 右下角坐标
bbox_bottom_right_x = int(max(bbox_keypoint_A_xy[0], bbox_keypoint_B_xy[0]))
bbox_bottom_right_y = int(max(bbox_keypoint_A_xy[1], bbox_keypoint_B_xy[1]))
# 画矩形:画框
img_bgr = cv2.rectangle(img_bgr, (bbox_top_left_x, bbox_top_left_y), (bbox_bottom_right_x, bbox_bottom_right_y),
bbox_color, bbox_thickness)
# 写框类别文字:图片,文字字符串,文字左上角坐标,字体,字体大小,颜色,字体粗细
img_bgr = cv2.putText(img_bgr, bbox_label, (
bbox_top_left_x + bbox_labelstr['offset_x'],
bbox_top_left_y + bbox_labelstr['offset_y']),
cv2.FONT_HERSHEY_SIMPLEX, bbox_labelstr['font_size'], bbox_color,
bbox_labelstr['font_thickness'])
# <<<<<<<<<<<<<<<<<<可视化关键点(keypoint)标注>>>>>>>>>>>>>>>>>>>>>
# 关键点的可视化配置
# 关键点配色
kpt_color_map = {
'0': {'name': '0', 'color': [0, 0, 255], 'radius': 25, 'thickness':-1},
'1': {'name': '1', 'color': [255, 0, 0], 'radius': 25, 'thickness':-1},
'2': {'name': '2', 'color': [255, 0, 0], 'radius': 25, 'thickness':-1},
'3': {'name': '3', 'color': [0, 255, 0], 'radius': 25, 'thickness':-1},
'4': {'name': '4', 'color': [0, 255, 0], 'radius': 25, 'thickness':-1},
'5': {'name': '5', 'color': [193, 182, 255], 'radius': 25, 'thickness':-1},
'6': {'name': '6', 'color': [193, 182, 255], 'radius': 25, 'thickness':-1},
# '7': {'name': '7', 'color': [16, 144, 247], 'radius': 25},
# '8': {'name': '8', 'color': [16, 144, 247], 'radius': 25},
}
# 点类别文字
kpt_labelstr = {
'font_size':4, # 字体大小
'font_thickness':12, # 字体粗细
'offset_x':30, # X 方向,文字偏移距离,向右为正
'offset_y':100, # Y 方向,文字偏移距离,向下为正
}
# 画点
for each_ann in labelme['shapes']: # 遍历每一个标注
if each_ann['shape_type'] == 'point': # 筛选出关键点标注
kpt_label = each_ann['label'] # 该点的类别
# 该点的 XY 坐标
kpt_xy = each_ann['points'][0]
kpt_x, kpt_y = int(kpt_xy[0]), int(kpt_xy[1])
# 该点的可视化配置
kpt_color = kpt_color_map[kpt_label]['color'] # 颜色
kpt_radius = kpt_color_map[kpt_label]['radius'] # 半径
kpt_thickness = kpt_color_map[kpt_label]['thickness'] # 线宽(-1代表填充)
# 画圆:画该关键点
img_bgr = cv2.circle(img_bgr, (kpt_x, kpt_y), kpt_radius, kpt_color, kpt_thickness)
# 写该点类别文字:图片,文字字符串,文字左上角坐标,字体,字体大小,颜色,字体粗细
img_bgr = cv2.putText(img_bgr, kpt_label, (kpt_x + kpt_labelstr['offset_x'], kpt_y + kpt_labelstr['offset_y']),
cv2.FONT_HERSHEY_SIMPLEX, kpt_labelstr['font_size'], kpt_color,
kpt_labelstr['font_thickness'])
# # <<<<<<<<<<<<<<<<<<可视化多段线(polygon)标注>>>>>>>>>>>>>>>>>>>>>
# # 多段线的可视化配置
# poly_color = (151, 57, 224)
# poly_thickness = 3
#
# poly_labelstr = {
# 'font_size':4, # 字体大小
# 'font_thickness':12, # 字体粗细
# 'offset_x':-200, # X 方向,文字偏移距离,向右为正
# 'offset_y':0, # Y 方向,文字偏移距离,向下为正
# }
#
# # 画多段线
# img_mask = np.ones(img_bgr.shape, np.uint8) #创建一个和img_bgr一样大小的黑色mask
#
# for each_ann in labelme['shapes']: # 遍历每一个标注
#
# if each_ann['shape_type'] == 'polygon': # 筛选出多段线(polygon)标注
#
# poly_label = each_ann['label'] # 该多段线的类别
#
# poly_points = [np.array(each_ann['points'], np.int32).reshape((-1, 1, 2))] #reshape后增加一个维度
#
# # 该多段线平均 XY 坐标,用于放置多段线类别文字
# x_mean = int(np.mean(poly_points[0][:, 0, :][:, 0])) #取出所有点的x坐标并求平均值
# y_mean = int(np.mean(poly_points[0][:, 0, :][:, 1])) #取出所有点的y坐标并求平均值
#
# # 画该多段线轮廓
# img_bgr = cv2.polylines(img_bgr, poly_points, isClosed=True, color=poly_color, thickness=poly_thickness)
#
# # 画该多段线内部填充
# img_mask = cv2.fillPoly(img_mask, poly_points, color=poly_color) #填充的颜色为color=poly_color
#
# # 写该多段线类别文字:图片,文字字符串,文字左上角坐标,字体,字体大小,颜色,字体粗细
# img_bgr = cv2.putText(img_bgr, poly_label,
# (x_mean + poly_labelstr['offset_x'], y_mean + poly_labelstr['offset_y']),
# cv2.FONT_HERSHEY_SIMPLEX, poly_labelstr['font_size'], poly_color,
# poly_labelstr['font_thickness'])
# opacity = 0.8 # 透明度,越大越接近原图
# img_bgr = cv2.addWeighted(img_bgr, opacity, img_mask, 1-opacity, 0)
# 可视化
# plt.imshow(img_bgr[:,:,::-1]) # 将bgr通道转换成rgb通道
# plt.show()
# 可视化多段线填充效果
# plt.imshow(img_mask[:, :, ::-1]) # 将bgr通道转换成rgb通道
# plt.show()
# 当前目录下保存可视化结果
cv2.imwrite(str(output_path) + '/' + file_name, img_bgr)



4.json2txt(用YOLOV8进行关键点训练)
#将坐标框、关键点、线段的json标注转换为txt
import os
import json
import shutil
import numpy as np
from tqdm import tqdm
# 框的类别
bbox_class = {
'meter3':0
}
# 关键点的类别,注意按顺序写
keypoint_class = ['0','1','2','3','4','5','6','7','8']
path = 'E:/6' #json文件存放路径
save_folder='E:/7' #转换后的txt文件存放路径
# 定义单个json文件的转换
def process_single_json(labelme_path, save_folder):
with open(labelme_path, 'r', encoding='utf-8') as f:
labelme = json.load(f)
img_width = labelme['imageWidth'] # 图像宽度
img_height = labelme['imageHeight'] # 图像高度
# 生成 YOLO 格式的 txt 文件
suffix = labelme_path.split('.')[-2]
# print(suffix)
yolo_txt_path = suffix + '.txt'
# print(yolo_txt_path)
with open(yolo_txt_path, 'w', encoding='utf-8') as f:
for each_ann in labelme['shapes']: # 遍历每个标注
if each_ann['shape_type'] == 'rectangle': # 每个框,在 txt 里写一行
yolo_str = ''
# 框的信息
# 框的类别 ID
bbox_class_id = bbox_class[each_ann['label']]
yolo_str += '{} '.format(bbox_class_id)
# 左上角和右下角的 XY 像素坐标
bbox_top_left_x = int(min(each_ann['points'][0][0], each_ann['points'][1][0]))
bbox_bottom_right_x = int(max(each_ann['points'][0][0], each_ann['points'][1][0]))
bbox_top_left_y = int(min(each_ann['points'][0][1], each_ann['points'][1][1]))
bbox_bottom_right_y = int(max(each_ann['points'][0][1], each_ann['points'][1][1]))
# 框中心点的 XY 像素坐标
bbox_center_x = int((bbox_top_left_x + bbox_bottom_right_x) / 2)
bbox_center_y = int((bbox_top_left_y + bbox_bottom_right_y) / 2)
# 框宽度
bbox_width = bbox_bottom_right_x - bbox_top_left_x
# 框高度
bbox_height = bbox_bottom_right_y - bbox_top_left_y
# 框中心点归一化坐标
bbox_center_x_norm = bbox_center_x / img_width
bbox_center_y_norm = bbox_center_y / img_height
# 框归一化宽度
bbox_width_norm = bbox_width / img_width
# 框归一化高度
bbox_height_norm = bbox_height / img_height
yolo_str += '{:.5f} {:.5f} {:.5f} {:.5f} '.format(bbox_center_x_norm, bbox_center_y_norm,
bbox_width_norm, bbox_height_norm)
## 找到该框中所有关键点,存在字典 bbox_keypoints_dict 中
bbox_keypoints_dict = {}
for each_ann in labelme['shapes']: # 遍历所有标注
if each_ann['shape_type'] == 'point': # 筛选出关键点标注
# 关键点XY坐标、类别
x = int(each_ann['points'][0][0])
y = int(each_ann['points'][0][1])
label = each_ann['label']
if (x > bbox_top_left_x) & (x < bbox_bottom_right_x) & (y < bbox_bottom_right_y) & \
(y > bbox_top_left_y): # 筛选出在该个体框中的关键点
bbox_keypoints_dict[label] = [x, y]
if each_ann['shape_type'] == 'line': # 筛选出线段标注
# 起点XY坐标、类别
x0 = int(each_ann['points'][0][0])
y0 = int(each_ann['points'][0][1])
label = each_ann['label']
bbox_keypoints_dict[label] = [x0, y0]
# 终点XY坐标、类别
x1 = int(each_ann['points'][1][0])
y1 = int(each_ann['points'][1][1])
label = int(each_ann['label']) + 1 #将字符串转为整形,并+1,代表最后一个点
label = str(label) #将整型转为字符串
bbox_keypoints_dict[label] = [x1, y1]
# print(bbox_keypoints_dict)
# if (x > bbox_top_left_x) & (x < bbox_bottom_right_x) & (y < bbox_bottom_right_y) & \
# (y > bbox_top_left_y): # 筛选出在该个体框中的关键点
# bbox_keypoints_dict[label] = [x, y]
## 把关键点按顺序排好
for each_class in keypoint_class: # 遍历每一类关键点
if each_class in bbox_keypoints_dict:
keypoint_x_norm = bbox_keypoints_dict[each_class][0] / img_width
keypoint_y_norm = bbox_keypoints_dict[each_class][1] / img_height
yolo_str += '{:.5f} {:.5f} {} '.format(keypoint_x_norm, keypoint_y_norm, 2) # 2可见不遮挡 1遮挡 0没有点
else: # 不存在的点,一律为0
# yolo_str += '0 0 0 '.format(keypoint_x_norm, keypoint_y_norm, 0)
yolo_str += '0 0 0 '
# yolo_str += ' '
# 写入 txt 文件中
f.write(yolo_str + '\n')
shutil.move(yolo_txt_path, save_folder) #从yolo_txt_path文件夹中移动到save_folder文件夹中
# print('{} --> {} 转换完成'.format(labelme_path, yolo_txt_path))
# json2txt
for labelme_path0 in os.listdir(path):
labelme_path = path + '/' + labelme_path0
print(labelme_path)
process_single_json(labelme_path, save_folder)
print('YOLO格式的txt标注文件已保存至 ', save_folder)
5.划分训练集和验证集
import os
import random
import shutil
# 定义数据目录
data_directory = "E:\dataset_a" # 图片和标签数据目录
# dataset_a
# images
# labels
output_directory = "E:\dataset_b" # 输出数据目录
train_directory = output_directory + "/images/train"
val_directory = output_directory + "/images/val"
label_train_directory = output_directory + "/labels/train"
label_val_directory = output_directory + "/labels/val"
# 创建训练集和验证集目录(图片和标签)
os.makedirs(train_directory, exist_ok=True)
os.makedirs(val_directory, exist_ok=True)
os.makedirs(label_train_directory, exist_ok=True)
os.makedirs(label_val_directory, exist_ok=True)
# 定义划分比例(例如,80%训练集,20%验证集)
split_ratio = 0.8
# 获取数据文件列表
data_files = os.listdir(data_directory + "/images")
# 随机打乱数据文件列表
random.shuffle(data_files)
# 计算划分点
split_point = int(len(data_files) * split_ratio)
# 分配数据文件到训练集和验证集
train_files = data_files[:split_point]
val_files = data_files[split_point:]
# 复制图像文件到相应的目录
for file in train_files:
src_path = os.path.join(data_directory + "/images", file)
dest_path = os.path.join(train_directory, file)
shutil.copy(src_path, dest_path)
for file in val_files:
src_path = os.path.join(data_directory + "/images", file)
dest_path = os.path.join(val_directory, file)
shutil.copy(src_path, dest_path)
# 复制标签文件到相应的目录
for file in train_files:
name = file.split(".")[0]
label_name = name + '.txt'
src_path = os.path.join(data_directory + "/labels", label_name)
dest_path = os.path.join(label_train_directory, label_name)
shutil.copy(src_path, dest_path)
for file in val_files:
name = file.split(".")[0]
label_name = name + '.txt'
src_path = os.path.join(data_directory + "/labels", label_name)
dest_path = os.path.join(label_val_directory, label_name)
shutil.copy(src_path, dest_path)
print(f"划分完成!训练集包含 {len(train_files)} 张图像,验证集包含 {len(val_files)} 张图像。")
文章来源地址https://www.toymoban.com/news/detail-703431.html
文章来源:https://www.toymoban.com/news/detail-703431.html
到了这里,关于关键点数据增强的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!