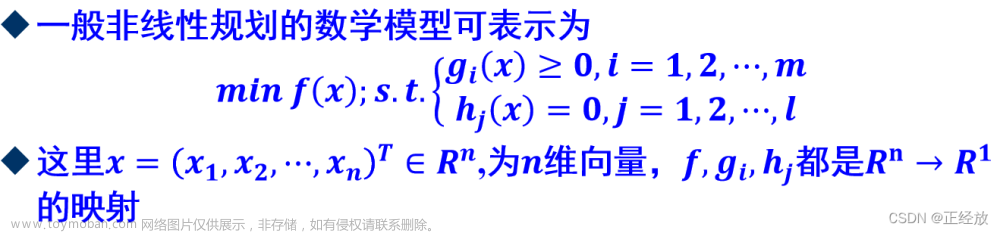
引言
本节将介绍凸优化问题,主要介绍凸优化问题的基本定义、凸优化与非凸优化问题的区分。
凸优化问题的基本定义
关于最优化问题
P
\mathcal P
P描述如下:
P
⇒
{
min
f
(
x
1
,
x
2
,
⋯
,
x
n
)
s.t.
{
G
i
(
x
1
,
x
2
,
⋯
,
x
n
)
≤
0
i
=
1
,
2
,
⋯
,
m
H
j
(
x
1
,
x
2
,
⋯
,
x
n
)
=
0
j
=
1
,
2
,
⋯
,
l
\mathcal P \Rightarrow \begin{cases} \min f(x_1,x_2,\cdots,x_n) \\ \text{s.t. } \begin{cases} \mathcal G_i(x_1,x_2,\cdots,x_n) \leq 0 \quad i=1,2,\cdots,m \\ \mathcal H_j(x_1,x_2,\cdots,x_n) = 0 \quad j=1,2,\cdots,l \end{cases} \end{cases}
P⇒⎩
⎨
⎧minf(x1,x2,⋯,xn)s.t. {Gi(x1,x2,⋯,xn)≤0i=1,2,⋯,mHj(x1,x2,⋯,xn)=0j=1,2,⋯,l
同时记最优化问题的可行域
S
\mathcal S
S为:从可行域中采样出的
x
∈
S
x \in \mathcal S
x∈S也被称作可行解。
S
=
{
x
∈
R
n
∣
G
i
(
x
)
≤
0
,
i
=
1
,
2
,
⋯
,
m
;
H
j
(
x
)
=
0
,
j
=
1
,
2
,
⋯
,
l
}
\mathcal S = \{x \in \mathbb R^n \mid \mathcal G_i(x) \leq 0,i=1,2,\cdots,m;\mathcal H_j(x) = 0,j=1,2,\cdots,l\}
S={x∈Rn∣Gi(x)≤0,i=1,2,⋯,m;Hj(x)=0,j=1,2,⋯,l}
什么情况下,最优化问题
P
\mathcal P
P被称作凸优化问题
?
?
?针对上述描述,需要满足如下三个条件:
- 目标函数 f ( x ) f(x) f(x)是关于决策变量 x x x的凸函数;
- m m m个不等式约束函数 G i ( x ) , i = 1 , 2 , ⋯ , m \mathcal G_i(x),i=1,2,\cdots,m Gi(x),i=1,2,⋯,m均是关于决策变量 x x x的凸函数;
- l l l个等式约束函数 H j ( x ) , j = 1 , 2 , ⋯ , l \mathcal H_j(x),j=1,2,\cdots,l Hj(x),j=1,2,⋯,l均是关于决策变量 x x x的线性函数。
观察不等式约束函数
G
i
(
x
)
\mathcal G_i(x)
Gi(x),为什么要强调它们是凸函数
?
?
?,首先,观察不等式约束的描述:
G
i
(
x
)
≤
0
i
=
1
,
2
,
⋯
,
m
\mathcal G_i(x) \leq 0 \quad i=1,2,\cdots,m
Gi(x)≤0i=1,2,⋯,m
这种描述明显是:关于函数
G
i
(
x
)
\mathcal G_i(x)
Gi(x)在水平值
a
=
0
a=0
a=0处的水平集
L
i
;
0
\mathcal L_{i;0}
Li;0:关于水平集的概念,详见凸函数:定义与基本性质。
L
i
;
0
=
{
x
∣
G
i
(
x
)
≤
0
,
x
∈
R
n
;
i
=
1
,
2
,
⋯
,
m
}
\mathcal L_{i;0} = \{x \mid \mathcal G_i(x) \leq 0,x \in \mathbb R^n;i=1,2,\cdots,m\}
Li;0={x∣Gi(x)≤0,x∈Rn;i=1,2,⋯,m}
根据水平集的定义:如果
G
i
(
x
)
,
i
=
1
,
2
,
⋯
,
m
\mathcal G_i(x),i=1,2,\cdots,m
Gi(x),i=1,2,⋯,m是凸函数,那么其对应的水平集
L
i
;
0
,
i
=
1
,
2
,
⋯
,
m
\mathcal L_{i;0},i=1,2,\cdots,m
Li;0,i=1,2,⋯,m必然是凸集。而
m
m
m个不等式约束对应的结果是
m
m
m个水平集的交集,而该交集必然也是凸集。关于凸集的交集也是凸集同样见上述链接几种保持函数凸性的运算。
同样,观察等式约束函数
H
j
(
x
)
,
j
=
1
,
2
,
⋯
,
l
\mathcal H_j(x),j=1,2,\cdots,l
Hj(x),j=1,2,⋯,l,如果它们是线性函数:
H
j
(
x
)
:
A
j
T
x
+
b
j
=
0
j
=
1
,
2
,
⋯
,
l
\mathcal H_j(x):\mathcal A_j^T x + b_j = 0 \quad j=1,2,\cdots,l
Hj(x):AjTx+bj=0j=1,2,⋯,l
而线性函数同样是凸函数,因而等式约束函数描述的集合同样也是凸集。从而在上述两类约束条件下的可行域
S
\mathcal S
S也必然是凸集。根据凸集的简单认识中介绍的:凸优化问题与凸集合凸函数的关系中的两个条件:
- 目标函数 f ( x ) f(x) f(x)是一个凸函数;
- x x x的可行域 S ⇒ x ∈ S \mathcal S \Rightarrow x \in \mathcal S S⇒x∈S是一个凸集;
满足条件的最优化问题才属于凸优化问题。
相反,如果目标函数
f
ˉ
(
x
)
\bar{f}(x)
fˉ(x)描述为:
max
f
ˉ
(
x
)
\max \bar{f}(x)
maxfˉ(x),想要将其转化为凸优化问题,我们需要判定:
f
ˉ
(
x
)
\bar{f}(x)
fˉ(x)是否为凹函数。如果
f
ˉ
(
x
)
\bar{f}(x)
fˉ(x)是凹函数,可以将其转化为相应凸函数的优化问题:关于凹函数,同样见凸函数:定义与基本性质。
max
f
ˉ
(
x
)
⇔
min
−
f
ˉ
(
x
)
\max \bar{f}(x) \Leftrightarrow \min - \bar{f}(x)
maxfˉ(x)⇔min−fˉ(x)
凸优化定义:示例
观察:下面的最优化问题是否为凸优化问题
?
?
?
{
min
f
(
x
)
=
x
1
2
+
x
2
2
s.t.
{
G
(
x
)
=
x
1
1
+
x
2
2
≤
0
H
(
x
)
=
(
x
1
+
x
2
)
2
=
0
\begin{cases} \min f(x) = x_1^2 + x_2^2 \\ \text{s.t. } \begin{cases} \begin{aligned} \mathcal G(x) & = \frac{x_1}{1 + x_2^2} \leq 0 \\ \mathcal H(x) & = (x_1 + x_2)^2 = 0 \end{aligned} \end{cases} \end{cases}
⎩
⎨
⎧minf(x)=x12+x22s.t. ⎩
⎨
⎧G(x)H(x)=1+x22x1≤0=(x1+x2)2=0
- 首先,观察到该最优化问题是最小化问题,并且目标函数
f
(
x
)
=
x
1
2
+
x
2
2
f(x) = x_1^2 + x_2^2
f(x)=x12+x22是凸函数;
该函数对应决策变量 x x x的 Hessian Matrix ⇒ ∇ 2 f ( x ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(x) Hessian Matrix⇒∇2f(x)是固定结果:( 2 0 0 2 ) \begin{pmatrix}2 \quad 0 \\ 0 \quad 2\end{pmatrix} (2002),它是一个正定矩阵(凸函数的二阶条件)。 - 观察不等式约束
G
(
x
)
=
x
1
1
+
x
2
2
\begin{aligned}\mathcal G(x) = \frac{x_1}{1 + x_2^2}\end{aligned}
G(x)=1+x22x1,从表面上看:它并不是一个凸函数。但我们可以推出如下表达:
由于分母1 + x 2 2 > 0 1 +x_2^2 > 0 1+x22>0恒成立,因此只需要观察分子的符号即可。
G ( x ) = x 1 1 + x 2 2 ≤ 0 ⇔ x 1 ≤ 0 ⇒ G ˉ ( x ) = x 1 \mathcal G(x) = \frac{x_1}{1 + x_2^2} \leq 0 \Leftrightarrow x_1 \leq 0 \Rightarrow \bar{\mathcal G}(x) = x_1 G(x)=1+x22x1≤0⇔x1≤0⇒Gˉ(x)=x1
而 G ˉ ( x ) = x 1 \bar{\mathcal G}(x) = x_1 Gˉ(x)=x1是线性函数,自然也是凸函数; - 观察等式约束
H
(
x
)
=
(
x
1
+
x
2
)
2
=
0
\mathcal H(x) = (x_1 + x_2)^2 = 0
H(x)=(x1+x2)2=0,很明显它不是线性函数。但我们同样可以推出如下表达:
H = ( x 1 + x 2 ) 2 = 0 ⇔ x 1 + x 2 = 0 ⇒ H ˉ ( x ) = x 1 + x 2 \mathcal H = (x_1 + x_2)^2 =0 \Leftrightarrow x_1 + x_2 = 0 \Rightarrow \bar{\mathcal H}(x) = x_1 + x_2 H=(x1+x2)2=0⇔x1+x2=0⇒Hˉ(x)=x1+x2
而 H ˉ ( x ) \bar{\mathcal H}(x) Hˉ(x)是线性函数。综上,该示例描述的最优化问题是凸优化问题。关于约束条件,可能并不是上来直接用,能够化简的部分需要进行化简。
凸优化与非凸优化问题的区分
在凸集的简单认识中,介绍了凸优化相关的两个优秀性质:
局部最优解即全局最优解
关于局部最优解
x
ˉ
\bar{x}
xˉ的定义表示为:
f
(
x
ˉ
)
≤
f
(
x
)
∀
∈
S
∩
N
ϵ
(
x
ˉ
)
f(\bar{x}) \leq f(x) \quad \forall \in \mathcal S \cap \mathcal N_{\epsilon}(\bar {x})
f(xˉ)≤f(x)∀∈S∩Nϵ(xˉ)
其中
N
ϵ
(
x
ˉ
)
\mathcal N_{\epsilon}(\bar{x})
Nϵ(xˉ)表示包含
x
ˉ
\bar{x}
xˉ的小的邻域范围。也就是说:仅在较小的邻域范围
S
∩
N
ϵ
(
x
ˉ
)
\mathcal S \cap \mathcal N_{\epsilon}(\bar{x})
S∩Nϵ(xˉ)内,某可行解
x
ˉ
\bar{x}
xˉ的目标函数值
≤
\leq
≤所有目标函数值,称可行解
x
ˉ
\bar{x}
xˉ为局部最优解;
相反,关于全局最优解
x
∗
x^*
x∗的定义表示为:
f
(
x
∗
)
≤
f
(
x
)
∀
x
∈
S
f(x^*) \leq f(x) \quad \forall x \in \mathcal S
f(x∗)≤f(x)∀x∈S
也就是说:在整个可行域
S
\mathcal S
S范围内,某可行解
x
∗
x^*
x∗的目标函数值
≤
\leq
≤所有目标函数值。称可行解
x
∗
x^*
x∗为全局最优解。
回到凸优化问题上:如果在 S \mathcal S S中找到某一个局部最优解,那么该解一定也是全局最优解。
(反证法)证明:
-
假设找到某个解
x
ˉ
\bar{x}
xˉ是局部最优解,但不是全局最优解,可以推出:必然存在某个解
x
∗
∈
S
x^* \in \mathcal S
x∗∈S,有:
如果不存在,这个局部解就是全局解~
f ( x ∗ ) < f ( x ˉ ) f(x^*) < f(\bar{x}) f(x∗)<f(xˉ) - 从
x
ˉ
\bar{x}
xˉ开始,沿着
x
∗
−
x
ˉ
x^* - \bar{x}
x∗−xˉ方向前进一个小的步长,得到一个新的点:
x
ˉ
+
λ
⋅
(
x
∗
−
x
ˉ
)
,
λ
∈
(
0
,
1
)
\bar {x} + \lambda \cdot (x^* - \bar{x}),\lambda \in (0,1)
xˉ+λ⋅(x∗−xˉ),λ∈(0,1),它的目标函数结果:
f
[
x
ˉ
+
λ
⋅
(
x
∗
−
x
ˉ
)
]
f[\bar{x} + \lambda \cdot (x^* - \bar{x})]
f[xˉ+λ⋅(x∗−xˉ)]可表示为:
可以将x ˉ + λ ⋅ ( x ∗ − x ˉ ) = ( 1 − λ ) ⋅ x ˉ + λ ⋅ x ∗ \bar{x} + \lambda \cdot (x^* - \bar{x}) = (1 - \lambda) \cdot \bar{x} + \lambda \cdot x^* xˉ+λ⋅(x∗−xˉ)=(1−λ)⋅xˉ+λ⋅x∗重新组合,可看作点x ˉ , x ∗ \bar{x},x^* xˉ,x∗的凸组合。将上面的f ( x ∗ ) < f ( x ˉ ) f(x^*) <f(\bar{x}) f(x∗)<f(xˉ)代入。
f [ λ ⋅ x ∗ + ( 1 − λ ) ⋅ x ˉ ] ≤ λ ⋅ f ( x ∗ ) + ( 1 − λ ) ⋅ f ( x ˉ ) < λ ⋅ f ( x ˉ ) + ( 1 − λ ) ⋅ f ( x ˉ ) = f ( x ˉ ) \begin{aligned} f[\lambda \cdot x^* + (1 - \lambda) \cdot \bar{x}] & \leq \lambda \cdot f(x^*) + (1 - \lambda) \cdot f(\bar{x}) \\ & < \lambda \cdot f(\bar{x}) + (1 - \lambda) \cdot f(\bar{x}) \\ & = f(\bar{x}) \end{aligned} f[λ⋅x∗+(1−λ)⋅xˉ]≤λ⋅f(x∗)+(1−λ)⋅f(xˉ)<λ⋅f(xˉ)+(1−λ)⋅f(xˉ)=f(xˉ) - 可以发现:无论 λ \lambda λ如何取值, f [ x ˉ + λ ⋅ ( x ∗ − x ˉ ) ] < f ( x ˉ ) f[\bar{x} + \lambda \cdot (x^* - \bar{x})] < f(\bar{x}) f[xˉ+λ⋅(x∗−xˉ)]<f(xˉ)恒成立。如果 λ ⇒ 0 \lambda \Rightarrow 0 λ⇒0,小到 x ˉ + λ ⋅ ( x ∗ − x ˉ ) \bar{x} + \lambda \cdot (x^* - \bar{x}) xˉ+λ⋅(x∗−xˉ)位于局部最优解邻域 N ϵ ( x ˉ ) \mathcal N_{\epsilon}(\bar{x}) Nϵ(xˉ)内,会出现矛盾: x ˉ \bar{x} xˉ是该邻域内的最优解,但存在另一个解 x ˉ + λ ⋅ ( x ∗ − x ˉ ) \bar{x} +\lambda \cdot (x^* - \bar{x}) xˉ+λ⋅(x∗−xˉ),其函数值小于 f ( x ˉ ) f(\bar{x}) f(xˉ),这意味着: x ˉ \bar{x} xˉ不是该邻域内的最优解。至此,得证:如过 x ˉ \bar{x} xˉ是局部最优解,那么它一定是全局最优解。
凸优化问题的最优性条件
什么样的解是凸优化问题的最优解
?
?
?关于最优解有如下充要条件:
x
∗
∈
S
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
∀
x
∈
S
x^* \in \mathcal S \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T (x - x^*) \geq 0 \quad \forall x \in \mathcal S
x∗∈S is Optimal ⇔[∇f(x∗)]T(x−x∗)≥0∀x∈S
为什么满足该充要条件就一定是最优解
?
?
?证明如下:
充分性:已知某解
x
∗
x^*
x∗满足
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
,
∀
x
∈
S
[\nabla f(x^*)]^T(x - x^*) \geq 0,\forall x \in \mathcal S
[∇f(x∗)]T(x−x∗)≥0,∀x∈S。
-
观察 f ( x ) f(x) f(x)与 f ( x ∗ ) + [ ∇ f ( x ∗ ) ] T ( x − x ∗ ) , ∀ x ∈ S f(x^*) + [\nabla f(x^*)]^T(x - x^*),\forall x \in \mathcal S f(x∗)+[∇f(x∗)]T(x−x∗),∀x∈S两者之间的大小关系。必然有:
-
其中不等式右侧描述:过[ x ∗ , f ( x ∗ ) ] [x^*,f(x^*)] [x∗,f(x∗)]点并与凸函数 f ( ⋅ ) f(\cdot) f(⋅)相切的直线。根据凸函数的定义,函数图像必然全部在切线上方。 -
又根据上述条件,必然有:f ( x ∗ ) + [ ∇ f ( x ∗ ) ] T ( x − x ∗ ) ≥ f ( x ∗ ) f(x^*) + [\nabla f(x^*)]^T(x - x^*) \geq f(x^*) f(x∗)+[∇f(x∗)]T(x−x∗)≥f(x∗)。
f ( x ) ≥ f ( x ∗ ) + [ ∇ f ( x ∗ ) ] T ( x − x ∗ ) ≥ f ( x ∗ ) f(x) \geq f(x^*) + [\nabla f(x^*)]^T (x - x^*) \geq f(x^*) f(x)≥f(x∗)+[∇f(x∗)]T(x−x∗)≥f(x∗)
-
-
总上,对于 x ∈ S x \in \mathcal S x∈S,都有上述式子 f ( x ) ≥ f ( x ∗ ) f(x) \geq f(x^*) f(x)≥f(x∗)成立,因而 x ∗ x^* x∗是全局最优解。
必要性:已知某解 x ∗ x^* x∗是全局最优解。(反证法)证明:
- 假设 ∃ x ˉ ∈ S \exist \bar{x} \in \mathcal S ∃xˉ∈S,使得: [ ∇ f ( x ∗ ) ] T ( x ˉ − x ∗ ) < 0 [\nabla f(x^*)]^T(\bar{x} - x^*) < 0 [∇f(x∗)]T(xˉ−x∗)<0;
- 基于上述假设,以
x
∗
x^*
x∗为起始,向
x
ˉ
\bar{x}
xˉ方向移动一个较小距离
λ
⋅
(
x
ˉ
−
x
∗
)
,
λ
∈
(
0
,
1
)
\lambda \cdot (\bar{x} - x^*),\lambda \in (0,1)
λ⋅(xˉ−x∗),λ∈(0,1),观察函数值从
f
(
x
∗
)
f(x^*)
f(x∗)到
f
[
x
∗
+
λ
⋅
(
x
ˉ
−
x
∗
)
]
f[x^* + \lambda \cdot (\bar{x} - x^*)]
f[x∗+λ⋅(xˉ−x∗)]的变化情况。这里使用泰勒公式对
f
[
x
∗
+
λ
⋅
(
x
ˉ
−
x
∗
)
]
f[x^* + \lambda \cdot (\bar{x} - x^*)]
f[x∗+λ⋅(xˉ−x∗)]在
x
∗
x^*
x∗处进行展开:
其中O ( ⋅ ) \mathcal O(\cdot) O(⋅)表示高阶无穷小。
f [ x ∗ + λ ⋅ ( x ˉ − x ∗ ) ] = f ( x ∗ ) + 1 1 ! ⋅ λ [ ∇ f ( x ∗ ) ] T ( x ˉ − x ∗ ) + O ( λ ∣ ∣ x ˉ − x ∗ ∣ ∣ ) λ ∈ ( 0 , 1 ) f[x^* + \lambda \cdot(\bar{x} - x^*)] = f(x^*) + \frac{1}{1 !} \cdot \lambda [\nabla f(x^*)]^T(\bar{x} - x^*) +\mathcal O(\lambda ||\bar{x} - x^*||) \quad \lambda \in (0,1) f[x∗+λ⋅(xˉ−x∗)]=f(x∗)+1!1⋅λ[∇f(x∗)]T(xˉ−x∗)+O(λ∣∣xˉ−x∗∣∣)λ∈(0,1)
整理得:
f [ x ∗ + λ ⋅ ( x ˉ − x ∗ ) ] − f ( x ∗ ) λ = [ ∇ f ( x ∗ ) ] T ( x ˉ − x ∗ ) + O ( λ ⋅ ∣ ∣ x ˉ − x ∗ ∣ ∣ ) λ \frac{f[x^* + \lambda \cdot (\bar{x} - x^*)] - f(x^*)}{\lambda} = [\nabla f(x^*)]^T(\bar{x} - x^*) + \frac{\mathcal O(\lambda \cdot ||\bar{x} - x^*||)}{\lambda} λf[x∗+λ⋅(xˉ−x∗)]−f(x∗)=[∇f(x∗)]T(xˉ−x∗)+λO(λ⋅∣∣xˉ−x∗∣∣)
当 λ ⇒ 0 \lambda \Rightarrow 0 λ⇒0时,等式右侧的符号由 [ ∇ f ( x ∗ ) ] T ( x ˉ − x ∗ ) [\nabla f(x^*)]^T(\bar{x} - x^*) [∇f(x∗)]T(xˉ−x∗)控制: < 0 <0 <0;等式左侧自然也 < 0 <0 <0:关于高阶无穷小:O ( λ ⋅ ∣ ∣ x ˉ − x ∗ ∣ ∣ ) λ \begin{aligned}\frac{\mathcal O(\lambda \cdot ||\bar{x} - x^*||)}{\lambda}\end{aligned} λO(λ⋅∣∣xˉ−x∗∣∣)在λ ⇒ 0 \lambda \Rightarrow 0 λ⇒0时,分子趋于0 0 0的速度更快。因而lim λ ⇒ 0 O ( λ ⋅ ∣ ∣ x ˉ − x ∗ ∣ ∣ ) λ = 0 \begin{aligned}\mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{\mathcal O(\lambda \cdot ||\bar{x} - x^*||)}{\lambda} = 0\end{aligned} λ⇒0limλO(λ⋅∣∣xˉ−x∗∣∣)=0。
lim λ ⇒ 0 f [ x ∗ + λ ⋅ ( x ˉ − x ∗ ) ] − f ( x ∗ ) λ < 0 ⇒ lim λ ⇒ 0 f [ x ∗ + λ ⋅ ( x ˉ − x ∗ ) ] − f ( x ∗ ) < 0 \mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{f[x^* + \lambda \cdot (\bar{x} - x^*)] - f(x^*)}{\lambda} <0 \Rightarrow \mathop{\lim}\limits_{\lambda \Rightarrow 0} f[x^* + \lambda \cdot(\bar{x} - x^*)] - f(x^*) <0 λ⇒0limλf[x∗+λ⋅(xˉ−x∗)]−f(x∗)<0⇒λ⇒0limf[x∗+λ⋅(xˉ−x∗)]−f(x∗)<0
这意味着:存在一点 x ∗ + λ ⋅ ( x ˉ − x ∗ ) x^* + \lambda \cdot(\bar{x} - x^*) x∗+λ⋅(xˉ−x∗),其函数值 f [ x ∗ + λ ⋅ ( x ˉ − x ∗ ) ] < f ( x ∗ ) f[x^* + \lambda \cdot(\bar{x} - x^*)] < f(x^*) f[x∗+λ⋅(xˉ−x∗)]<f(x∗)。也就是说: x ∗ x^* x∗不是全局最优解。这与条件相矛盾,证毕。
关于凸优化问题最优性条件的几何解释
对上述最优性条件变换成如下形式:
x
∗
∈
S
is Optimal
⇔
−
[
∇
f
(
x
∗
)
]
T
x
∗
≥
−
[
∇
f
(
x
∗
)
]
T
x
∀
x
∈
S
x^* \in \mathcal S \text{ is Optimal } \Leftrightarrow - [\nabla f(x^*)]^T x^* \geq - [\nabla f(x^*)]^T x \quad \forall x \in \mathcal S
x∗∈S is Optimal ⇔−[∇f(x∗)]Tx∗≥−[∇f(x∗)]Tx∀x∈S
根据凸集的支撑超平面定理,如果
−
[
∇
f
(
x
∗
)
]
≠
0
-[\nabla f(x^*)] \neq 0
−[∇f(x∗)]=0,则可以找到以
x
∗
x^*
x∗为边界点,并垂直于向量
−
[
∇
f
(
x
∗
)
]
-[\nabla f(x^*)]
−[∇f(x∗)]的超平面,使该超平面支撑凸集
S
\mathcal S
S。而
−
[
∇
f
(
x
∗
)
]
-[\nabla f(x^*)]
−[∇f(x∗)]作为负梯度方向,必然有:
∀
x
∈
S
,
s.t.
−
[
∇
f
(
x
∗
)
]
(
x
−
x
∗
)
≤
0
\forall x \in \mathcal S,\text{ s.t. }-[\nabla f(x^*)](x - x^*) \leq 0
∀x∈S, s.t. −[∇f(x∗)](x−x∗)≤0。对应图像表示如下:
-
其中支撑超平面定理是凸集的自身性质。 -
也就是说:向量− [ ∇ f ( x ∗ ) ] -[\nabla f(x^*)] −[∇f(x∗)]与向量x − x ∗ x -x^* x−x∗之间的夹角≥ 9 0 。 \geq 90^。 ≥90。恒成立。
个人深度思考:上述最优性条件成立建立在 − [ ∇ f ( x ∗ ) ] ≠ 0 -[\nabla f(x^*)] \neq 0 −[∇f(x∗)]=0的情况下,如果 − [ ∇ f ( x ∗ ) ] = 0 - [\nabla f(x^*)] =0 −[∇f(x∗)]=0时,有: ∀ x ∈ S , [ ∇ f ( x ∗ ) ] T ( x − x ∗ ) ≥ 0 \forall x \in \mathcal S,[\nabla f(x^*)]^T (x - x^*) \geq 0 ∀x∈S,[∇f(x∗)]T(x−x∗)≥0恒成立。也就是说:在凸集中的任意一点,都可以满足该条件。在迭代寻找最优解的过程中,如果 − [ ∇ f ( x ∗ ) ] = 0 -[\nabla f(x^*)] = 0 −[∇f(x∗)]=0,可能会选择错误的方向。
什么时候会出现这种情况:梯度消失的时候。也就是说:如果出现梯度消失的情况下,在迭代寻找最优解的过程中,可能会选择错误的方向。最终找到的最优解可能并不是凸集的某个边界点,而是某个内点。当然,如果选择的点是内点并且目标函数结果又返回至较大的情况,此时的梯度又存在了,会继续重新收敛至最优解。这里只是描述出现的这种反弹现象。
几种特殊凸问题的最优性条件
无约束凸优化
无约束凸优化问题:在目标函数
f
(
⋅
)
f(\cdot)
f(⋅)是凸函数的条件下,
x
∈
R
n
x \in \mathbb R^n
x∈Rn,关于
min
f
(
x
)
\min f(x)
minf(x)的最优性条件表示如下:
x
∗
is Optimal
⇔
∇
f
(
x
∗
)
=
0
x^* \text{ is Optimal } \Leftrightarrow \nabla f(x^*) = 0
x∗ is Optimal ⇔∇f(x∗)=0
如果将该问题带入凸优化问题最优性条件中,可以得到:
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
,
∀
x
∈
R
n
⇔
∇
f
(
x
∗
)
=
0
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T(x - x^*) \geq 0,\forall x \in \mathbb R^n \Leftrightarrow \nabla f(x^*) = 0
x∗ is Optimal ⇔[∇f(x∗)]T(x−x∗)≥0,∀x∈Rn⇔∇f(x∗)=0
可以理解为:
∀
x
∈
R
n
\forall x \in \mathbb R^n
∀x∈Rn构成的向量
x
−
x
∗
x - x^*
x−x∗均满足
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
[\nabla f(x^*)]^T(x - x^*) \geq 0
[∇f(x∗)]T(x−x∗)≥0,由于
x
−
x
∗
x - x^*
x−x∗结果可以是任意方向,因而只存在一种情况:
∇
f
(
x
)
\nabla f(x)
∇f(x)是零向量。这里需要与上面描述的梯度消失的情况区分一下。上述的最优性条件必须满足可行域
S
\mathcal S
S是凸集。如果在
S
\mathcal S
S是凸集情况下,
∇
f
(
x
∗
)
=
0
\nabla f(x^*) =0
∇f(x∗)=0会导致无法找到
x
∗
x^*
x∗位置下关于凸集
S
\mathcal S
S的支撑超平面;相反,在无约束凸优化问题中,对可行域
S
\mathcal S
S没有约束。
等式约束凸优化
等式约束的凸优化问题:在目标函数
f
(
⋅
)
f(\cdot)
f(⋅)是凸函数的条件下,关于
min
{
f
(
x
)
∣
A
x
=
b
}
\min \{f(x) \mid \mathcal A x = b\}
min{f(x)∣Ax=b}的最优性条件表示如下:关于凸优化问题的等式约束函数是线性函数。
x
∗
is Optimal
⇔
∃
μ
,
s.t.
∇
f
(
x
∗
)
+
A
T
μ
=
0
,
A
x
∗
=
0
x^* \text{ is Optimal } \Leftrightarrow \exist \mu, \text{ s.t. } \nabla f(x^*) + \mathcal A^T \mu = 0,\mathcal A x^* = 0
x∗ is Optimal ⇔∃μ, s.t. ∇f(x∗)+ATμ=0,Ax∗=0
证明:
如果
x
∗
x^*
x∗是全局最优解,必然有:
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
∀
x
:
A
x
=
b
,
A
x
∗
=
b
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T(x - x^*) \geq 0 \quad \forall x:\mathcal Ax = b,\mathcal Ax^* = b
x∗ is Optimal ⇔[∇f(x∗)]T(x−x∗)≥0∀x:Ax=b,Ax∗=b
根据
A
x
=
A
x
∗
=
b
\mathcal Ax = \mathcal Ax^* = b
Ax=Ax∗=b,因而有:
A
(
x
−
x
∗
)
=
b
−
b
=
0
\mathcal A(x - x^*) = b - b =0
A(x−x∗)=b−b=0。记向量
d
=
x
−
x
∗
d = x - x^*
d=x−x∗,从而有:
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
d
≥
0
∀
d
:
A
d
=
0
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T d \geq 0 \quad \forall d:\mathcal Ad = 0
x∗ is Optimal ⇔[∇f(x∗)]Td≥0∀d:Ad=0
很明显,
A
d
=
0
\mathcal Ad =0
Ad=0是一个齐次线性方程组,可以将
d
d
d描述为:
A
x
=
0
\mathcal Ax = 0
Ax=0解集中的一个解。即:
d
∈
N
(
A
)
d \in \mathcal N(\mathcal A)
d∈N(A):其中
N
(
A
)
\mathcal N(\mathcal A)
N(A)表示系数矩阵
A
\mathcal A
A的零空间。
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
d
≥
0
∀
d
∈
N
(
A
)
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T d \geq 0 \quad \forall d \in \mathcal N(\mathcal A)
x∗ is Optimal ⇔[∇f(x∗)]Td≥0∀d∈N(A)
发现这样一个现象:如果
d
∈
N
(
A
)
d \in \mathcal N(\mathcal A)
d∈N(A)那么
−
d
∈
N
(
A
)
⇒
−
A
d
=
0
-d \in \mathcal N(\mathcal A) \Rightarrow -\mathcal Ad = 0
−d∈N(A)⇒−Ad=0,将
d
,
−
d
d,-d
d,−d都带入上式中:
{
[
∇
f
(
x
∗
)
]
T
d
≥
0
[
∇
f
(
x
∗
)
]
T
(
−
d
)
≥
0
⇒
[
∇
f
(
x
∗
)
]
T
d
≤
0
\begin{cases} [\nabla f(x^*)]^Td \geq 0 \\ [\nabla f(x^*)]^T(-d) \geq 0 \Rightarrow [\nabla f(x^*)]^T d \leq 0 \end{cases}
{[∇f(x∗)]Td≥0[∇f(x∗)]T(−d)≥0⇒[∇f(x∗)]Td≤0
也就是说:关于
[
∇
f
(
x
∗
)
]
T
d
[\nabla f(x^*)]^T d
[∇f(x∗)]Td在可行域
d
∈
N
(
A
)
d \in \mathcal N(\mathcal A)
d∈N(A)中只能取等:
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
d
=
0
∀
d
∈
N
(
A
)
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T d = 0 \quad \forall d \in \mathcal N(\mathcal A)
x∗ is Optimal ⇔[∇f(x∗)]Td=0∀d∈N(A)
这意味着:向量
∇
f
(
x
∗
)
\nabla f(x^*)
∇f(x∗)与
N
(
A
)
\mathcal N(\mathcal A)
N(A)中的任意解向量
d
d
d均是垂直关系,即向量
∇
f
(
x
∗
)
\nabla f(x^*)
∇f(x∗)与
N
(
A
)
\mathcal N(\mathcal A)
N(A)垂直:
x
∗
is Optimal
⇔
∇
f
(
x
∗
)
∈
N
(
A
)
⊥
x^* \text{ is Optimal } \Leftrightarrow \nabla f(x^*) \in \mathcal N(\mathcal A)^{\bot}
x∗ is Optimal ⇔∇f(x∗)∈N(A)⊥
对应图像表示如下:其中
[
∇
f
(
x
∗
)
]
T
d
=
∥
∇
f
(
x
∗
)
∥
⋅
∥
d
∥
⋅
cos
θ
=
0
→
cos
θ
=
0
[\nabla f(x^*)]^Td = \|\nabla f(x^*)\| \cdot \|d\| \cdot \cos \theta = 0\rightarrow \cos \theta = 0
[∇f(x∗)]Td=∥∇f(x∗)∥⋅∥d∥⋅cosθ=0→cosθ=0
因而
∇
f
(
x
∗
)
\nabla f(x^*)
∇f(x∗)必然能够表达为系数矩阵
A
\mathcal A
A行向量的线性组合。对应数学符号表示为:这实际上就是
KKT
\text{KKT}
KKT条件在等式约束凸问题的具体化。后续有机会介绍~
x
∗
is Optimal
⇔
∇
f
(
x
∗
)
+
A
T
μ
=
0
x^* \text{ is Optimal } \Leftrightarrow \nabla f(x^*) + \mathcal A^T \mu = 0
x∗ is Optimal ⇔∇f(x∗)+ATμ=0
非负约束凸优化
基于非负约束的凸优化问题:在目标函数
f
(
⋅
)
f(\cdot)
f(⋅)是凸函数的条件下,关于
min
{
f
(
x
)
∣
x
≥
0
}
\min\{f(x) \mid x \geq 0\}
min{f(x)∣x≥0}的最优性条件表示如下:
x
∗
is Optimal
⇔
∇
f
(
x
∗
)
i
⋅
x
i
∗
=
0
x
∗
≥
0
;
∇
f
(
x
∗
)
≥
0
x^* \text{ is Optimal } \Leftrightarrow \nabla f(x^*)_i \cdot x_i^* = 0\quad x^* \geq 0;\nabla f(x^*) \geq 0
x∗ is Optimal ⇔∇f(x∗)i⋅xi∗=0x∗≥0;∇f(x∗)≥0
证明:依然根据凸优化问题的最优性条件,有:其中
x
∗
x^*
x∗作为可行域内的最优解,必然也满足:
x
∗
≥
0
x^* \geq 0
x∗≥0
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
(
x
−
x
∗
)
≥
0
∀
x
≥
0
;
x
∗
≥
0
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T (x - x^*) \geq 0 \quad \forall x \geq 0;x^* \geq 0
x∗ is Optimal ⇔[∇f(x∗)]T(x−x∗)≥0∀x≥0;x∗≥0
将上式展开,整理有:
x
∗
is Optimal
⇔
[
∇
f
(
x
∗
)
]
T
x
≥
[
∇
f
(
x
∗
)
]
T
x
∗
∀
x
≥
0
;
x
∗
≥
0
x^* \text{ is Optimal } \Leftrightarrow [\nabla f(x^*)]^T x \geq [\nabla f(x^*)]^T x^* \quad \forall x \geq 0;x^* \geq 0
x∗ is Optimal ⇔[∇f(x∗)]Tx≥[∇f(x∗)]Tx∗∀x≥0;x∗≥0
观察上式:
∀
x
≥
0
\forall x \geq 0
∀x≥0,并满足:
[
∇
f
(
x
∗
)
]
T
x
≥
[
∇
f
(
x
∗
)
]
T
x
∗
[\nabla f(x^*)]^T x \geq [\nabla f(x^*)]^T x^*
[∇f(x∗)]Tx≥[∇f(x∗)]Tx∗,必然有:
-
解释:如果∇ f ( x ∗ ) \nabla f(x^*) ∇f(x∗)中存在某一个/若干个分量< 0 <0 <0,在执行线性运算[ ∇ f ( x ∗ ) ] T x [\nabla f(x^*)]^Tx [∇f(x∗)]Tx时,由于x x x可在x ≥ 0 x\geq 0 x≥0范围内任意取值,假设x x x中对应上述∇ f ( x ∗ ) \nabla f(x^*) ∇f(x∗)分量< 0 <0 <0的分量位置是+ ∞ +\infty +∞,那么[ ∇ f ( x ∗ ) ] T x [\nabla f(x^*)]^Tx [∇f(x∗)]Tx的结果必然是− ∞ -\infty −∞。这是可能发生的结果。但该结果可能不满足[ ∇ f ( x ∗ ) ] T x ≥ [ ∇ f ( x ∗ ) ] T x ∗ [\nabla f(x^*)]^T x \geq [\nabla f(x^*)]^T x^* [∇f(x∗)]Tx≥[∇f(x∗)]Tx∗。因此:∇ f ( x ∗ ) ≥ 0 \nabla f(x^*) \geq 0 ∇f(x∗)≥0必须成立。 -
当x = 0 x = 0 x=0时,必然也满足:[ ∇ f ( x ∗ ) ] T x ∗ ≤ [ ∇ f ( x ∗ ) ] ⋅ 0 = 0 [\nabla f(x^*)]^Tx^* \leq [\nabla f(x^*)] \cdot 0 = 0 [∇f(x∗)]Tx∗≤[∇f(x∗)]⋅0=0
x ∗ is Optimal ⇔ { ∇ f ( x ∗ ) ≥ 0 ; x ∗ ≥ 0 [ ∇ f ( x ∗ ) ] T x ∗ ≤ 0 x^* \text{ is Optimal } \Leftrightarrow \begin{cases} \nabla f(x^*) \geq 0;x^* \geq 0 \\ [\nabla f(x^*)]^T x^* \leq 0 \end{cases} x∗ is Optimal ⇔{∇f(x∗)≥0;x∗≥0[∇f(x∗)]Tx∗≤0
继续观察上式:在
∇
f
(
x
∗
)
,
x
∗
≥
0
\nabla f(x^*),x^* \geq 0
∇f(x∗),x∗≥0情况下,
[
∇
f
(
x
∗
)
]
T
x
∗
≤
0
[\nabla f(x^*)]^T x^* \leq 0
[∇f(x∗)]Tx∗≤0。因此只有一种情况:
x
∗
is Optimal
⇔
{
∇
f
(
x
∗
)
≥
0
;
x
∗
≥
0
[
∇
f
(
x
∗
)
]
T
x
∗
=
0
x^* \text{ is Optimal } \Leftrightarrow \begin{cases} \nabla f(x^*) \geq 0;x^* \geq 0 \\ [\nabla f(x^*)]^T x^* = 0 \end{cases}
x∗ is Optimal ⇔{∇f(x∗)≥0;x∗≥0[∇f(x∗)]Tx∗=0
这意味着:线性运算
[
∇
f
(
x
∗
)
]
T
x
[\nabla f(x^*)]^T x
[∇f(x∗)]Tx过程执行加法运算的每一个分量
∇
f
(
x
∗
)
i
⋅
x
i
(
i
=
1
,
2
,
⋯
,
n
)
\nabla f(x^*)_i \cdot x_i(i=1,2,\cdots,n)
∇f(x∗)i⋅xi(i=1,2,⋯,n)均为
0
0
0。相反,如果存在某分量乘积结果
∇
f
(
x
∗
)
k
⋅
x
k
∗
>
0
(
k
∈
{
1
,
2
,
⋯
,
n
}
)
\nabla f(x^*)_k \cdot x_k^*> 0(k \in \{1,2,\cdots,n\})
∇f(x∗)k⋅xk∗>0(k∈{1,2,⋯,n})最终的
[
∇
f
(
x
∗
)
]
T
x
[\nabla f(x^*)]^T x
[∇f(x∗)]Tx结果必然
>
0
>0
>0,不满足上述条件。
证毕。文章来源:https://www.toymoban.com/news/detail-705159.html
Reference
\text{Reference}
Reference:
最优化理论与方法-第四讲-凸优化问题文章来源地址https://www.toymoban.com/news/detail-705159.html
到了这里,关于机器学习笔记之最优化理论与方法(五)凸优化问题(上)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!