重力补偿原理
1.力传感器数据分析

将六维力传感器三个力分量与力矩分量的零点值分别记为 ( F x 0 , F y 0 , F z 0 ) (F_{x0},F_{y0},F_{z0}) (Fx0,Fy0,Fz0), ( M x 0 , M y 0 , M z 0 ) (M_{x0},M_{y0},M_{z0}) (Mx0,My0,Mz0),
传感器与末端工装重力为 G G G,质心在六维力传感器坐标系中的坐标为 ( x , y , z ) (x,y,z) (x,y,z),
重力 G G G在三个坐标轴方向上的分力与作用力矩分别为 ( G x , G y , G z ) (G_x,G_y,G_z) (Gx,Gy,Gz), ( M g x , M g y , M g z ) (M_{gx},M_{gy},M_{gz}) (Mgx,Mgy,Mgz)。
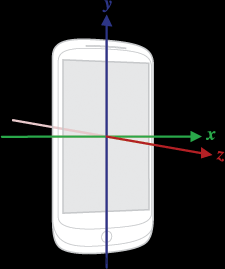
根据力与力矩的关系可以得到(正方向由右手定则确定):
{ M g x = G z × y − G y × z M g y = G x × z − G z × x M g z = G y × x − G x × y \left\{ \begin{array}{c} M_{gx}=G_z \times y-G_y \times z\\ M_{gy}=G_x \times z-G_z \times x\\ M_{gz}=G_y \times x-G_x \times y \end{array} \right. ⎩
⎨
⎧Mgx=Gz×y−Gy×zMgy=Gx×z−Gz×xMgz=Gy×x−Gx×y
将六维力传感器直接测量得到的三个方向的力分量与力矩分量分别记为 ( F x , F y , F z ) (F_x,F_y,F_z) (Fx,Fy,Fz), ( M x , M y , M z ) (M_x,M_y,M_z) (Mx,My,Mz),
假设标定的时候没有外部作用力在末端夹持器上,则力传感器所测得的力和力矩由负载重力及零点组成,则有
{ F x = G x + F x 0 F y = G y + F y 0 F z = G z + F z 0 \left\{ \begin{array}{c} F_x=G_x+F_{x0}\\ F_y=G_y+F_{y0}\\ F_z=G_z+F_{z0} \end{array} \right. ⎩
⎨
⎧Fx=Gx+Fx0Fy=Gy+Fy0Fz=Gz+Fz0
{ M x = M g x + M x 0 M y = M g y + M y 0 M z = M g z + M z 0 \left\{ \begin{array}{c} M_x=M_{gx}+M_{x0}\\ M_y=M_{gy}+M_{y0}\\ M_z=M_{gz}+M_{z0} \end{array} \right. ⎩ ⎨ ⎧Mx=Mgx+Mx0My=Mgy+My0Mz=Mgz+Mz0
联立得:
{ M x = ( F z − F z 0 ) × y − ( F y − F y 0 ) × z + M x 0 M y = ( F x − F x 0 ) × z − ( F z − F z 0 ) × x + M y 0 M z = ( F y − F y 0 ) × x − ( F x − F x 0 ) × y + M z 0 \left\{ \begin{array}{c} M_x=(F_z-F_{z0}) \times y-(F_y-F_{y0}) \times z+M_{x0}\\ M_y=(F_x-F_{x0}) \times z-(F_z-F_{z0}) \times x+M_{y0}\\ M_z=(F_y-F_{y0}) \times x-(F_x-F_{x0}) \times y+M_{z0} \end{array} \right. ⎩
⎨
⎧Mx=(Fz−Fz0)×y−(Fy−Fy0)×z+Mx0My=(Fx−Fx0)×z−(Fz−Fz0)×x+My0Mz=(Fy−Fy0)×x−(Fx−Fx0)×y+Mz0文章来源:https://www.toymoban.com/news/detail-705972.html
{ M x = F z × y − F y × z + M x 0 + F y 0 × z − F z 0 × y M y = F x × z − F z × x + M y 0 + F z 0 × x − F x 0 × z M z = F y × x − F x × y + M z 0 + F x 0 × y − F y 0 × x \left\{ \begin{array}{c} M_x=F_z \times y - F_y \times z + M_{x0} + F_{y0} \times z -F_{z0} \times y \\ M_y=F_x \times z - F_z \times x + M_{y0} + F_{z0} \times x -F_{x0} \times z \\ M_z=F_y \times x - F_x \times y + M_{z0} + F_{x0} \times y -F_{y0} \times x \end{array} \right. ⎩ ⎨ ⎧Mx=Fz×y−Fy×z+Mx0+Fy0×z−Fz0×yMy=Fx×z−Fz×x+My0+Fz0×x−Fx0×zMz=Fy×文章来源地址https://www.toymoban.com/news/detail-705972.html
到了这里,关于机械臂六维力传感器重力补偿原理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!