💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、Simulink及文章
💥1 概述
摘要。建立了蒸汽冷凝器的动态模型。该模型基于总凝结和恒定的液体和蒸汽体积的假设。运行工况取自电厂的静态平衡。
1 .能量平衡
这里描述的凝汽器动态模型是基于能量平衡和冷却水质量平衡。
能量平衡是基于总凝结假设的,即入口蒸汽和出口凝结水都是饱和的。因此,从蒸汽传递到冷却水的热量等于蒸汽的潜热:

式中:Q为凝汽器热负荷[ k W ],Fc凝结水质量流量,[ kg / s ],λ为饱和蒸汽比潜热。
传热速率方程近似为:
 式中,UA为总传热系数乘以传热面积,∆Tm为对数平均温差,定义为:
式中,UA为总传热系数乘以传热面积,∆Tm为对数平均温差,定义为:

其中,Tc为冷凝水温度,Tcw为冷却水进口温度, T为冷却水出口温度。
详细讲解见第4部分。
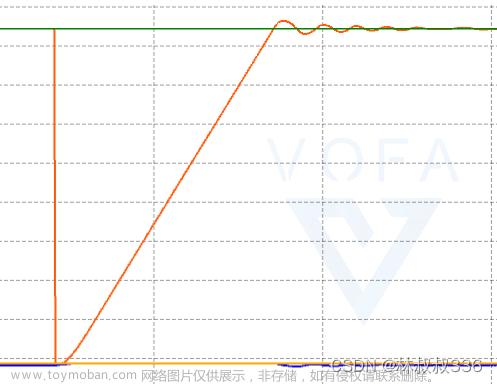
📚2 运行结果






部分代码:
%%
K=10.8; % PID controller gain
TI=2.56; % PID controller integral time constant
TD=0; % PID controller derivative time constant
u=0; % zero for closed loop simulation
sim('SteamCondenser') % run the model
for k=1:4 % plot results
subplot(4,1,k);
plot(y.time,y.signals(k).values,'linewidth',2)
title(y.signals(k).title)
grid
end
xlabel('time, s')
%%
%Example 2
% To tune the PID controller through the process reaction curve approach
K=0;TI=1;TD=0; % make the system open loop
u=1; % size od step input test
sim('SteamCondenser') % run open loop test
[Kp,tau,td]=ReactionCurve(y.time,y.signals(4).values); % Reaction curve
td=td-10; % adjust time delay from the step test starting time
K=-(0.9/Kp)*(tau/td); % PID tuning based on reaction curve
TI=3.3*td;
u=0; % closed-loop without test input
sim('SteamCondenser') % run closed-loop test
for k=1:4 % plot results
subplot(4,1,k);
plot(y.time,y.signals(k).values,'linewidth',2)
title(y.signals(k).title)
grid
end
xlabel('time, s')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]曹毅 (2023).蒸汽冷凝器模型和PI控制.
[2]孔夏明,王苇,孟海波,等.蒸汽排放系统蒸汽冷凝器动态特性仿真研究[J].原子能科学技术, 2013, 47(012):2272-2276.DOI:10.7538/yzk.2013.47.12.2272.文章来源:https://www.toymoban.com/news/detail-706079.html
[3]李书霞.改进群智能算法及其在PID控制器参数整定中的应用[D].辽宁科技大学[2023-08-31].DOI:CNKI:CDMD:2.1016.144508.文章来源地址https://www.toymoban.com/news/detail-706079.html
🌈4 Matlab代码、Simulink及文章
到了这里,关于【蒸汽冷凝器型号和PI控制】具有PID控制的蒸汽冷凝器的动力学模型(Matlab&Simulink)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!