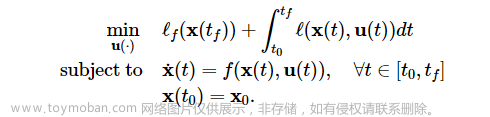
展会倒计时:7天
本次的中国国际工业博览会正运动技术将携高性能x86平台Windows实时视觉运动控制器VPLC711亮相。

•运动控制+机器视觉一站式开发,缩短开发周期,降低硬件成本;
•可替代传统的工控机+运动控制卡/PLC+视觉软件的自动化设备解决方案;
•运动控制实时内核MotionRT7,实现核间交互,指令调用速度比传统的PCl/PCle快10倍,整体设备产能可提升10%左右。

此次展会,正运动不仅会展示VPLC711产品本身,还将整合多个一体化的演示demo应用方案,为客户提供在展会现场亲身体验开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案的机会。我们将以创造高附加价值为着眼点,旨在构建更快、更精准、更智能的创新型智能装备,为用户提供更多可能性。
正运动技术将于2023年9月19日参加2023上海工博会,诚挚邀请您亲临6.1H-E261展位,与我们共同探讨如何利用VPLC711为多领域的智能装备赋能。

01 高性能x86平台Windows实时视觉运动控制器VPLC711

高性能x86平台Windows实时视觉运动控制器,开创全新智能制造!
●可选6-64轴运动控制(脉冲+EtherCAT总线);
●内置实时内核MotionRT7,支持第三方视觉软件;
●板载20路通用输入(其中10路为高速输入),20路高速输出;
●多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
●多维位置同步输出PSO,可在连续加工过程中精准控制点胶胶量和激光能量等参数;
●开放式IPC形态实时软控制器/软PLC,可灵活集成运动控制+视觉一体化解决方案。

02 高性能机器视觉运动控制一体机应用预览
1、高速异形插件机

方案使用产品
VPLC711
解决方案介绍
方案采用XY直线运动平台、传输装置、供料装置等,以及核心控制模块,同时搭载了我司的机器视觉运动控制一体机VPLC711。
VPLC711具备多核并行运算能力,能高效处理运动控制和机器视觉等自动化设备核心任务,确保了在插件工艺中的路径规划、数据交互、元器件插装、夹持控制、工件卸载等关键步骤能够以高速高精完成。
方案应用优势
-
EtherCAT同步周期250us,实现多轴高速高精运动控制;
-
力矩控制功能,精确控制夹爪的夹持力度,以防止工件损坏或松动;
-
可通过EtherCAT进行灵活扩展,实现多轴联动,多工位协同,提升生产效率;
-
路径规划功能,可以优化插件移动轨迹,提高插装效率和速度;
-
视觉飞拍功能,可快速对插装元器件进行瞬时触发相机拍摄和照明。
方案应用框图
2、五轴联动旋转视觉点胶机

方案使用产品
VPLC711
解决方案介绍
方案采用了双轴向旋转机构、压电喷射阀、直线导轨滑台、图像处理系统等组件构成,同时搭载了我司的x86平台Windows实时视觉运动控制器VPLC711。
配合正运动技术提供的专用视觉点胶准系统应用软件,只需简单参数设置,搭配图像采集硬件,不仅快速实现全自动五轴联动点胶的项目开发与调试,还可实现多轴联动自动点胶的操作和高速数据传输,可解决传统“运动控制卡+工控机+图像处理系统”数据交互不及时而导致的节拍根据不上生产需求、软硬集成度度不高等问题。
方案应用优势
- 支持EtherCAT总线,实现多轴联动高速点胶,提升效率;
- 支持PWM功能,直接触发胶阀开关,无需额外控制器,精准控制胶点大小;
- 丰富路径编辑功能,适用于曲面、复杂轨迹;
- 减少胶水浪费,精准喷涂,成本更低;
- 高准确性,视觉纠偏,适用于各种产品摆放位姿。

方案应用框图

3、SCARA机械手柔性上料应用

方案使用产品
VPLC711
解决方案介绍
方案采用了SCARA机械手、柔性供料系统、图像处理系统等核心控制部件,并搭载了我司的x86平台Windows实时视觉运动控制器VPLC711。
VPLC711具备多核并行运算能力,能高效处理运动控制和机器视觉等自动化设备核心任务,这确保了在上料站中,SCARA机械手能够高速高精确地完成姿态调整、视觉纠偏和精准上料等关键步骤。与传统的“PC+Windows+机器视觉+运动控制卡”方案相比,它解决了多套硬件配置所带来的高成本、接线繁琐和数据交互速率低等问题。
方案应用优势
- 支持高速高精轨迹逼近功能,确保了机械手的平滑位移控制;
- 支持多种路径规划功能:机械手轨迹插补,关节运动、直线运动、圆弧运动、拱形运动等;
- 整合了丰富的运动控制、通讯连接、IO管理、视觉等功能,可覆盖绝大部分机械手应用需求;
- 具有高度灵活和通用性:支持30+机械手模型的控制算法,如SCARA、Delta、六关节、协作等;
- 支持轴控扩展功能,同一台控制器硬件资源的其他轴,可以用来做其他辅助运动,节省硬件成本。

轨迹逼近对比示意图(①没有轨迹逼近;②有轨迹逼近)
方案应用框图
 文章来源:https://www.toymoban.com/news/detail-706373.html
文章来源:https://www.toymoban.com/news/detail-706373.html
在即将到来的2023工博会上,我们热诚邀请您届时莅临6.1H-E261展位,与我们的产品工程师团队进行现场交流,共同探讨如何运用高性能x86平台Windows实时视觉运动控制器VPLC711,为您的智能装备注入新活力,走向更快、更精准、更智能的前进之路!文章来源地址https://www.toymoban.com/news/detail-706373.html
到了这里,关于2023工博会,正运动机器视觉运动控制一体机应用预览(二)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!