目录
- 普冉PY32系列(一) PY32F0系列32位Cortex M0+ MCU简介
- 普冉PY32系列(二) Ubuntu GCC Toolchain和VSCode开发环境
- 普冉PY32系列(三) PY32F002A资源实测 - 这个型号不简单
- 普冉PY32系列(四) PY32F002A/003/030的时钟设置
- 普冉PY32系列(五) 使用JLink RTT代替串口输出日志
- 普冉PY32系列(六) 通过I2C接口驱动PCF8574扩展的1602LCD
- 普冉PY32系列(七) SOP8,SOP10,SOP16封装的PY32F002A/PY32F003管脚复用
- 普冉PY32系列(八) GPIO模拟和硬件SPI方式驱动无线收发芯片XN297LBW
- 普冉PY32系列(九) GPIO模拟和硬件SPI方式驱动无线收发芯片XL2400
- 普冉PY32系列(十) 基于PY32F002A的6+1通道遥控小车I - 综述篇
- 普冉PY32系列(十一) 基于PY32F002A的6+1通道遥控小车II - 控制篇
- 普冉PY32系列(十二) 基于PY32F002A的6+1通道遥控小车III - 驱动篇
XN297LBW
XN297LBW 是一个SOP8封装的2.4GHz频段无线收发芯片, 价格在1元左右, 适用于低成本应用. 虽然磐启已经发布了 XN297L 的下一代产品 PAN1026, 但是市面上基本上见不到后者的身影, 零售能买到的还是 XN297L.
生产商是上海磐启, 产品页地址: https://wiki.panchip.com/ble-lite/2-4g-t-rx/xn297l_series/
磐启对 XN297L 的产品介绍: "工作在 2.400~2.483GHz 世界通用 ISM 频段的单片无线收发芯片, XN297L采用嵌入式基带协议引擎, 适用于超低功耗无线应用. 采用 GFSK 调制, 可配置频率信道, 输出功率和接口数据速率等射频参数. XN297L 支持 2Mbps, 1Mbps 和 250Kbps 的数据速率. 对于长距离应用, 输出功率可以调节高达 11dBm, 对于短距离和超低功率应用, 输出功率可以低至-23dBm."
XN297LBW 主要特性
- 无线
- 通信频段:2.400GHz~2.483GHz
- 数据速率:2Mbps,1Mbps,250Kbps
- 调制方式:GFSK
- 发射器
- 输出功率:11, 9, 5, -1, -10 or -23dBm
- 18mA@2dBm
- 30mA@9dBm
- 接收器
- -83dBm@2Mbps
- -87dBm@1Mbps
- -91dBm@250Kbps
- 协议引擎
- 支持1到32字节或64字节数据长度
- 支持自动应答及自动重传
- 6个接收数据通道构成1:6的星状网络
- 电源管理
- 工作电压:2.3~3.3V
- 2uA断电模式
- 30uA待机-Ⅰ模式
- 主机接口
- 支持3引脚SPI, 4Mbps SPI接口速率
- 支持两个独立的32字节TX和RX FIFOs
- 支持一个64字节的TX和RX FIFOs
- 封装
- SOP8
这里要注意的几点:
- 工作电压是3.3V, 不要错接5V.
- SPI速率为4MHz, 实测上限不会比4MHz高多少, 在6MHz频率时大概率SPI通信错误导致不能工作.
- TX FIFO 与NRF24L01相比只有两个32字节, 而NRF24L01是3个32字节. 性能相对缩水.
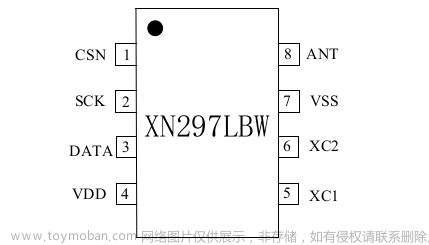
PIN脚定义和应用电路
PIN脚定义
- VDD 和 VSS 分别接 VCC 和 GND
- XC1 和 XC2 接晶振
- ANT 接天线
- 用于MCU接口通信的只有 CSN, SCK 和 DATA 这三个PIN
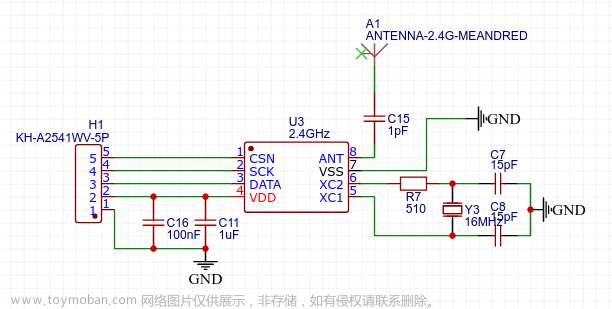
应用电路
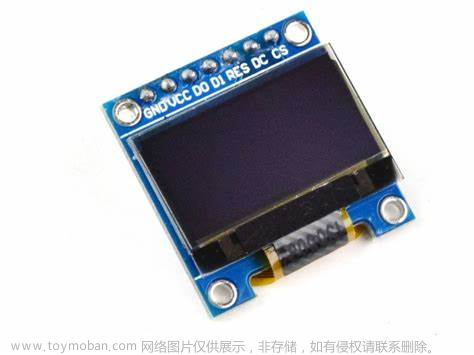
模块实物
嘉立创打样的测试模块 (项目地址 https://oshwhub.com/iosetting/xn297lbw-xl2400-evb)

使用PY32F0驱动XN297LBW
XN297L最新的SDK可以从磐启的论坛下载 论坛›BLE-Lite系列2.4GHz TRX›XN297L›XN297L_SDK. 因为面向的主要是低成本应用, 大多数搭配的MCU为廉价的8位8051, 不一定有硬件SPI, 为了保证兼容在SDK中使用的都是GPIO模拟SPI方式进行驱动. 但是实际上是可以通过硬件SPI方式进行驱动的.
以下分别对GPIO模拟和硬件SPI方式的驱动进行介绍.
硬件准备
- XN297LBW模块
- PY32F002A/PY32F003/PY32F030 系列MCU的开发板, 建议在验证阶段使用 20PIN 及以上封装的型号, 避免PIN脚复用引起的干扰. 跑通后再迁移到低PIN型号
- USB2TTL模块, 用于观察输出
- 以上硬件需要两套, 测试中分别用于接收和发送
下面以PY32F002A为例. 代码不需调整可以直接运行于 PY32F003x 和 PY32F030x 系列的其它型号.
GPIO模拟方式
接线
注意电源使用3.3V
PY32 XN297LBW SOP8
PA1 ------> CLK/SCK
PA6 ------> CSN/NSS
PA7 ------> DATA/MOSI
USB2TTL
PA2(TX) ----> RX
PA3(RX) ----> TX
代码说明
SDK代码中使用的MCU是STM8L, 需要迁移到 PY32F002A.
将 xn297l.h 中的 GPIO 设置换为PY32F002A的PIN脚
#define XN297L_DATA_OUT() LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_7, LL_GPIO_MODE_OUTPUT)
#define XN297L_DATA_IN() LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_7, LL_GPIO_MODE_INPUT)
#define XN297L_DATA_LOW() LL_GPIO_ResetOutputPin(GPIOA, LL_GPIO_PIN_7)
#define XN297L_DATA_HIGH() LL_GPIO_SetOutputPin(GPIOA, LL_GPIO_PIN_7)
#define XN297L_DATA_READ() LL_GPIO_IsInputPinSet(GPIOA, LL_GPIO_PIN_7)
#define XN297L_SCK_LOW() LL_GPIO_ResetOutputPin(GPIOA, LL_GPIO_PIN_1)
#define XN297L_SCK_HIGH() LL_GPIO_SetOutputPin(GPIOA, LL_GPIO_PIN_1)
#define XN297L_CSN_LOW() LL_GPIO_ResetOutputPin(GPIOA, LL_GPIO_PIN_6)
#define XN297L_CSN_HIGH() LL_GPIO_SetOutputPin(GPIOA, LL_GPIO_PIN_6)
#define XN297L_CE_LOW() XN297L_WriteReg(XN297L_CMD_CE_FSPI_OFF, 0)
#define XN297L_CE_HIGH() XN297L_WriteReg(XN297L_CMD_CE_FSPI_ON, 0)
在 main.c 中增加GPIO初始化
static void APP_GPIOConfig(void)
{
LL_GPIO_InitTypeDef GPIO_InitStruct;
/* PA1 CLK */
GPIO_InitStruct.Pin = LL_GPIO_PIN_1;
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* PA6 CSN */
GPIO_InitStruct.Pin = LL_GPIO_PIN_6;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* PA7 DATA */
GPIO_InitStruct.Pin = LL_GPIO_PIN_7;
GPIO_InitStruct.Mode = LL_GPIO_MODE_INPUT;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
使用GPIO模拟SPI的字节写
/**
* Emulate SPI Write on GPIO pins
*/
void XN297L_WriteByte(uint8_t value)
{
uint8_t i = 0;
XN297L_SCK_LOW();
XN297L_DATA_OUT();
for (i = 0; i < 8; i++)
{
XN297L_SCK_LOW();
if (value & 0x80)
{
XN297L_DATA_HIGH();
}
else
{
XN297L_DATA_LOW();
}
XN297L_SCK_HIGH();
value = value << 1;
}
XN297L_SCK_LOW();
}
模拟字节读. 这里有个细节, 在XN297L_SCK_HIGH();之后加一个__NOP();, 如果没有这个NOP(), PY32F0在低频率(8MHz和24MHz)的时候容易产生读取错误.
/**
* Emulate SPI Read on GPIO pins
*/
uint8_t XN297L_ReadByte(void)
{
uint8_t i = 0, RxData = 0;
XN297L_DATA_IN();
for (i = 0; i < 8; i++)
{
RxData = RxData << 1;
XN297L_SCK_HIGH();
__NOP();
if (XN297L_DATA_READ())
{
RxData |= 0x01;
}
else
{
RxData &= 0xfe;
}
XN297L_SCK_LOW();
}
return RxData;
}
XN297L 的初始化. 这部分是相对固定的流程, 可以根据自己的需要进行调整, 但是在测试阶段务必保持接收端和发送端的配置一致. 这里在SDK的代码上做了一些修改, 开启了发送的重试和ACK.
// 这部分来自于手册 "XN297L 软件设计和调试参考"
const uint8_t
BB_cal_data[] = {0x12,0xED,0x67,0x9C,0x46},
RF_cal_data[] = {0xF6,0x3F,0x5D},
RF_cal2_data[] = {0x45,0x21,0xEF,0x2C,0x5A,0x42},
Dem_cal_data[] = {0x01},
Dem_cal2_data[] = {0x0B,0xDF,0x02};
void XN297L_Init(void)
{
XN297L_WriteReg(XN297L_CMD_RST_FSPI, 0x5A); // Soft reset
XN297L_WriteReg(XN297L_CMD_RST_FSPI, 0XA5);
XN297L_WriteReg(XN297L_CMD_FLUSH_TX, 0);
XN297L_WriteReg(XN297L_CMD_FLUSH_RX, 0);
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_STATUS, 0x70); // Clear status flags
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_EN_AA, 0x3F); // AutoAck on all pipes
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_EN_RXADDR, 0x3F); // Enable all pipes (P0 ~ P5, bit0 ~ bit5)
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_SETUP_AW, XN297L_SETUP_AW_5BYTE); // Address width
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RF_CH, 78); // Channel 78, 2478M HZ
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P0, XN297L_PLOAD_WIDTH ); // Payload width of P0
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P1, XN297L_PLOAD_WIDTH ); // Payload width of P1
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P2, XN297L_PLOAD_WIDTH ); // Payload width of P2
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P3, XN297L_PLOAD_WIDTH ); // Payload width of P3
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P4, XN297L_PLOAD_WIDTH ); // Payload width of P4
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RX_PW_P5, XN297L_PLOAD_WIDTH ); // Payload width of P5
XN297L_WriteFromBuf(XN297L_CMD_W_REGISTER | XN297L_REG_BB_CAL, BB_cal_data, sizeof(BB_cal_data));
XN297L_WriteFromBuf(XN297L_CMD_W_REGISTER | XN297L_REG_RF_CAL2, RF_cal2_data, sizeof(RF_cal2_data));
XN297L_WriteFromBuf(XN297L_CMD_W_REGISTER | XN297L_REG_DEM_CAL, Dem_cal_data, sizeof(Dem_cal_data));
XN297L_WriteFromBuf(XN297L_CMD_W_REGISTER | XN297L_REG_RF_CAL, RF_cal_data, sizeof(RF_cal_data));
XN297L_WriteFromBuf(XN297L_CMD_W_REGISTER | XN297L_REG_DEM_CAL2, Dem_cal2_data,sizeof(Dem_cal2_data));
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_DYNPD, 0x00); // Dynamic payload width: off
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_RF_SETUP, XN297L_RF_POWER_P_9|XN297L_RF_DR_1M); // 9dbm 1Mbps
XN297L_WriteReg(XN297L_CMD_ACTIVATE, 0x73);
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_SETUP_RETR, 0x10|0x05); // Retry interval 500µs, 5 times
if(XN297L_PLOAD_WIDTH >32)
{
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_FEATURE, XN297L_FEATURE_BIT5_CE_SOFT|XN297L_FEATURE_BIT43_DATA_64BYTE);
}
else
{
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_FEATURE, XN297L_FEATURE_BIT5_CE_SOFT);
}
}
数据发送函数. 因为前面开启了重试和ACK, 这里做了一个等待发送结果的轮询和超时判断
uint8_t XN297L_TxData(uint8_t *ucPayload, uint8_t length)
{
uint8_t y = 100, status = 0;
XN297L_CE_HIGH();
__NOP();
XN297L_WriteFromBuf(XN297L_CMD_W_TX_PAYLOAD, ucPayload, length);
// Retry until timeout
while (y--)
{
LL_mDelay(1);
status = XN297L_ReadStatus();
// If TX successful or retry timeout, exit
if ((status & (XN297L_FLAG_MAX_RT | XN297L_FLAG_TX_DS)) != 0)
{
//printf(" %d %02x\r\n", y, status);
break;
}
}
XN297L_WriteReg(XN297L_CMD_FLUSH_TX, 0);
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_STATUS, 0x70);
XN297L_CE_LOW();
return status;
}
数据接收. 因为接收使用的是轮询, 所以这里只是简单地判断了接收状态, 在收到数据时读取数据.
uint8_t XN297L_DumpRxData(void)
{
uint8_t status, rxplWidth;
status = XN297L_ReadStatus();
if (status & XN297L_FLAG_RX_DR)
{
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_STATUS, status);
rxplWidth = XN297L_ReadReg(XN297L_CMD_R_RX_PL_WID);
XN297L_ReadToBuf(XN297L_CMD_R_RX_PAYLOAD, xbuf, rxplWidth);
}
return status;
}
完整代码
XN297L 示例代码的 GitHub 仓库地址: https://github.com/IOsetting/py32f0-template/tree/main/Examples/PY32F0xx/LL/GPIO/XN297LBW_Wireless
运行测试
修改 main.c 中的模式设置, 0为接收, 1为发送, 分别写入至两个PY32F002A开发板, 观察UART的输出.
// 0:RX, 1:TX
#define XN297L_MODE 0
接收端在每次接收到数据时, 输出第1,2,31个字节的值; 发送端每发送255组数据(每组32字节)后, 会显示发送成功的个数(十六进制), 这个输出可以用于计算发送成功率, 以及发送速度.
硬件SPI方式
接线
接线方式使用4线制全双工, PY32的MOSI和MISO都接到XN297LBW的DATA, 但是在MOSI(PA7)上串一个1K的电阻. 对于使用SPI协议的三线连接, 如果半双工SPI有问题, 都可以用这种接线试试全双工方式通信. 从实际测试看, XN297LBW 支持这种接线方式.
PY32 XN297LBW SOP8
PA0 ------------> DATA/MOSI
PA7 ---> 1KR ---> DATA/MOSI
PA1 ------------> CLK/SCK
PA6 ------------> CSN/NSS
USB2TTL
PA2(TX) ----------> RX
PA3(RX) ----------> TX
代码说明
SPI接口的初始化. 注意SPI的时钟频率不要超过4MHz
/**
* SPI1 Alternative Function Pins
* SPI1_SCK: PA1_AF0, PA2_AF10, PA5_AF0, PA9_AF10, PB3_AF0
* SPI1_MISO: PA0_AF10, PA6_AF0, PA7_AF10, PA11_AF0, PA13_AF10, PB4_AF0
* SPI1_MOSI: PA1_AF10, PA2_AF0, PA3_AF10, PA7_AF0, PA8_AF10, PA12_AF0, PB5_AF0
* SPI1_NSS: PA4_AF0, PA10_AF10, PA15_AF0, PB0_AF0, PF1_AF10, PF3_AF10
*/
static void APP_SPI_Config(void)
{
LL_SPI_InitTypeDef SPI_InitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
LL_APB1_GRP2_EnableClock(LL_APB1_GRP2_PERIPH_SPI1);
// PA1 SCK
GPIO_InitStruct.Pin = LL_GPIO_PIN_1;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_UP;
GPIO_InitStruct.Alternate = LL_GPIO_AF_0;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA0 MISO
GPIO_InitStruct.Pin = LL_GPIO_PIN_0;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_10;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA7 MOSI
GPIO_InitStruct.Pin = LL_GPIO_PIN_7;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_0;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*
* Full duplex mode, MOSI and MISO both connect to DATA,
* Add one 1KR between MOSI and DATA
*/
SPI_InitStruct.TransferDirection = LL_SPI_FULL_DUPLEX;
SPI_InitStruct.Mode = LL_SPI_MODE_MASTER;
SPI_InitStruct.DataWidth = LL_SPI_DATAWIDTH_8BIT;
SPI_InitStruct.ClockPolarity = LL_SPI_POLARITY_LOW;
SPI_InitStruct.ClockPhase = LL_SPI_PHASE_1EDGE;
SPI_InitStruct.NSS = LL_SPI_NSS_SOFT;
// SPI的时钟频率不要超过4MHz
SPI_InitStruct.BaudRate = LL_SPI_BAUDRATEPRESCALER_DIV16;
SPI_InitStruct.BitOrder = LL_SPI_MSB_FIRST;
LL_SPI_Init(SPI1, &SPI_InitStruct);
LL_SPI_Enable(SPI1);
}
硬件SPI方式的字节读写
uint8_t SPI_TxRxByte(uint8_t data)
{
uint8_t SPITimeout = 0xFF;
/* Check the status of Transmit buffer Empty flag */
while (READ_BIT(SPI1->SR, SPI_SR_TXE) == RESET)
{
if (SPITimeout-- == 0)
return 0;
}
LL_SPI_TransmitData8(SPI1, data);
SPITimeout = 0xFF;
while (READ_BIT(SPI1->SR, SPI_SR_RXNE) == RESET)
{
if (SPITimeout-- == 0)
return 0;
}
// Read from RX buffer
return LL_SPI_ReceiveData8(SPI1);
}
对应XN297L的命令读写改造为调用硬件SPI读写函数
uint8_t XN297L_WriteReg(uint8_t reg, uint8_t value)
{
uint8_t reg_val;
XN297L_CSN_LOW();
SPI_TxRxByte(reg);
reg_val = SPI_TxRxByte(value);
XN297L_CSN_HIGH();
return reg_val;
}
uint8_t XN297L_ReadReg(uint8_t reg)
{
uint8_t reg_val;
XN297L_CSN_LOW();
SPI_TxRxByte(reg);
reg_val = SPI_TxRxByte(XN297L_CMD_NOP);
XN297L_CSN_HIGH();
return reg_val;
}
完整代码
XN297L 示例代码的 GitHub 仓库地址: https://github.com/IOsetting/py32f0-template/tree/main/Examples/PY32F0xx/LL/SPI/XN297L_Wireless
运行测试
和GPIO模拟方式的一样, 修改 main.c 中的模式设置, 0为接收, 1为发送, 分别写入至两个PY32F002A开发板, 观察UART的输出.
// 0:RX, 1:TX
#define XN297L_MODE 0
利用FIFO队列提升发送速度
在 NRF24L01 的使用中, 可以通过 "直接写入TX FIFO -> 通过 FLAG 观察 TX FIFO 是否写满判断是继续写入还是阻塞等待" 的方式提升发送速度. XN297L 的 TX FIFO 队列包含两组 32 个字节, 也可以通过这种方式进行加速.
相关的函数
ErrorStatus XN297L_TxFast(const uint8_t *ucPayload, uint8_t length)
{
//Blocking only if FIFO is full. This will loop and block until TX is successful or fail
while ((XN297L_ReadStatus() & XN297L_FLAG_TX_FULL)) {
if (xn297l_state & XN297L_FLAG_MAX_RT) {
return ERROR;
}
}
XN297L_WriteFromBuf(XN297L_CMD_W_TX_PAYLOAD, ucPayload, length);
XN297L_CE_HIGH();
return SUCCESS;
}
// 用于 MAX_RT 状态清除标志位
void XN297L_ReuseTX(void)
{
XN297L_WriteReg(XN297L_CMD_W_REGISTER | XN297L_REG_STATUS, XN297L_FLAG_MAX_RT); //Clear max retry flag
XN297L_CE_LOW();
XN297L_CE_HIGH();
}
使用方式: 在发送循环中调用 XN297L_TxFast() 进行发送, 在遇到错误时, 用 XN297L_ReuseTX() 重置状态文章来源:https://www.toymoban.com/news/detail-710704.html
if (XN297L_TxFast(tmp, XN297L_PLOAD_WIDTH) == SUCCESS)
{
j++;
}
else
{
XN297L_ReuseTX();
}
从实际测试结果看, 用 XN297L_TxFast() 发送相比普通发送方式有10%的性能提升.文章来源地址https://www.toymoban.com/news/detail-710704.html
到了这里,关于普冉PY32系列(八) GPIO模拟和硬件SPI方式驱动无线收发芯片XN297LBW的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!