串口的回顾 & 硬件接线
关于串口也是之前学习过很多次了,详见:
认识串口 和 蓝牙模块HC08_hc08蓝牙模块_mjmmm的博客-CSDN博客
串口的再认识-CSDN博客
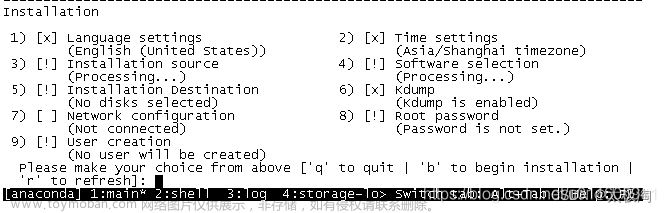
香橙派提供了两路串口,第一路就是在刷机时串口连接的引脚(对应驱动ttyS0),第二路就是物理引脚8和10(对应驱动ttyS5):

此处要请出老朋友CH340,这次连接物理引脚8和10的第二路串口:

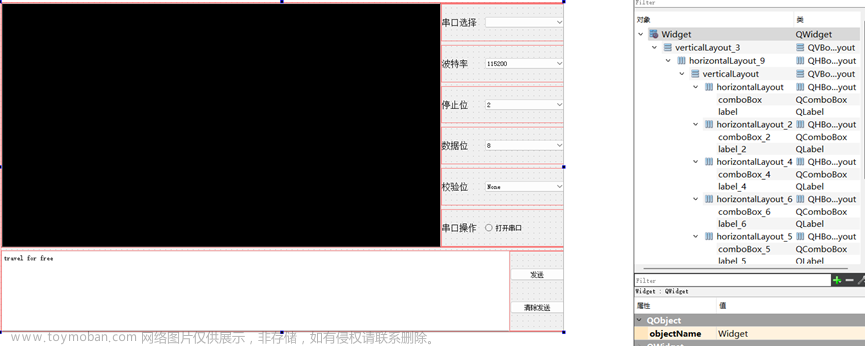
在使用串口连接香橙派的时候,使用的Mobaxterm就可以视为一个串口助手,但Moba更多的是提供一个基于指令交互的平台,所以串口助手的使用还是选择之前用过的AI Thinker:

在实际应用中,单片机作为比较简单的芯片,可以去负责数据的采集,然后通过串口接到相对高级的香橙派或其他芯片,香橙派读取数据并进行复杂的数据分析或开发,包括人工智能,UI,网络等在单片机中难以实现的功能,同时通过串口给单片机发送各种指令。
基于wiringPI库的串口开发
关于串口的代码,wiringPI库同样提供了demo代码:

cp一份过来:

(也可以使用SourceInsight来读代码!)
首先,发现打开默认的demo打开的是串口2的驱动,所以此处要改成串口5的驱动:

然后编译运行:(显示的就是串口助手中发来的字符的ASCII码形式)

串口助手中记得勾选HEX显示:(发送的就是16进制的0到256)

基于demo的优化
可以使用之前学习的线程相关概念来优化这个demo,关于线程的知识之前也学过,详见:
线程_mjmmm的博客-CSDN博客
Linux线程 --- 生产者消费者模型(C语言)-CSDN博客
serial_wiringPI_test.c:
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <wiringPi.h>
#include <wiringSerial.h>
#include <pthread.h>
#include <stdlib.h>
void *read_serial(void *arg)
{
char *sendbuf;
sendbuf = (char *)malloc(32*sizeof(char));
char *p = sendbuf;
while(1){
memset(sendbuf,'\0',32*sizeof(char));
fgets(sendbuf,sizeof(sendbuf),stdin);
//scanf("%s",sendbuf);
while(*sendbuf != '\0'){
serialPutchar (*((int *)arg), *sendbuf) ; //串口打印数据的函数 serialPutchar()
sendbuf++;
}
sendbuf = p;
}
pthread_exit(NULL);
}
void *write_serial(void *arg)
{
while(1){
while(serialDataAvail (*((int *)arg))){ //当串口有数据的时候进入while
printf ("%c", serialGetchar (*((int *)arg))) ; //串口接收数据的函数serialGetchar()
fflush (stdout) ;
}
}
pthread_exit(NULL);
}
int main ()
{
int fd ;
int ret;
pthread_t read_thread;
pthread_t write_thread;
if ((fd = serialOpen ("/dev/ttyS5", 115200)) < 0) //打开驱动文件,配置波特率
{
fprintf (stderr, "Unable to open serial device: %s\n", strerror (errno)) ;
return 1 ;
}
if (wiringPiSetup () == -1)
{
fprintf (stdout, "Unable to start wiringPi: %s\n", strerror (errno)) ;
return 1 ;
}
ret = pthread_create(&read_thread,NULL,read_serial,(void *)&fd);
if(ret != 0){
printf("read_serial create error\n");
return 1;
}
ret = pthread_create(&write_thread,NULL,write_serial,(void *)&fd);
if(ret != 0){
printf("write_serial create error\n");
return 1;
}
pthread_join(read_thread,NULL);
pthread_join(write_thread,NULL);
return 0 ;
}实现效果:
发送数据:

接收数据:

也可以一边发一边接,因为经过优化,接和发被封装在了不同的线程中!
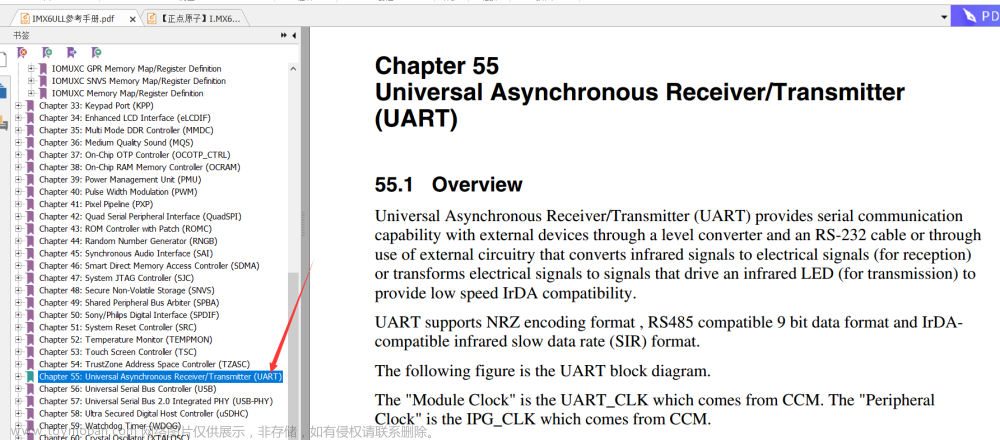
Linux原生串口开发
通过sourceinsight查看跳转wiringPI库实现的串口代码,就会发现函数的实现并不困难,所以可以尝试不使用wiringPI库,自己通过Linux封装函数实现串口的通讯。
首先观察wiringPi库,其对于串口最核心的就是三个函数,serialOpen();serialPutchar();serialGetchar(),所以我就自己写一个C文件来实现这三个函数(其实所谓的自己实现就是根据sourceinsight跳转这三个函数,然后删去一些我认为在使用中不必要的代码,与其说是自己实现,更不如说是对这三个函数进行一个删减,精简化),然后创建一个关于它的h文件,最后在串口通讯的函数里添加这个我写的h文件,使用我自己实现的这三个函数来完成串口的通讯。
步骤为:编写mjm_uart_tool.c -> 编写mjm_uart_tool.h -> 编写serial_mjm_test.c调用mjm_uart_tool.h来实现和刚刚使用wiringPI相同的效果。
mjm_uart_tool.c:
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "wiringSerial.h"
int myserialOpen (const char *device, const int baud)
{
struct termios options ;
speed_t myBaud ;
int status, fd ;
switch (baud){
case 9600: myBaud = B9600 ; break ;
case 115200: myBaud = B115200 ; break ;
}
if ((fd = open (device, O_RDWR | O_NOCTTY | O_NDELAY | O_NONBLOCK)) == -1)
return -1 ;
fcntl (fd, F_SETFL, O_RDWR) ;
// Get and modify current options:
tcgetattr (fd, &options) ;
cfmakeraw (&options) ;
cfsetispeed (&options, myBaud) ;
cfsetospeed (&options, myBaud) ;
options.c_cflag |= (CLOCAL | CREAD) ;
options.c_cflag &= ~PARENB ;
options.c_cflag &= ~CSTOPB ;
options.c_cflag &= ~CSIZE ;
options.c_cflag |= CS8 ;
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ;
options.c_oflag &= ~OPOST ;
options.c_cc [VMIN] = 0 ;
options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds)
tcsetattr (fd, TCSANOW, &options) ;
ioctl (fd, TIOCMGET, &status);
status |= TIOCM_DTR ;
status |= TIOCM_RTS ;
ioctl (fd, TIOCMSET, &status);
usleep (10000) ; // 10mS
return fd ;
}
void serialSendstring (const int fd, const char *s)
{
int ret;
ret = write (fd, s, strlen (s));
if (ret < 0)
printf("Serial Puts Error\n");
}
int serialGetstring (const int fd, char *buffer)
{
int n_read;
n_read = read(fd, buffer,32);
return n_read;
}
int serialDataAvail (const int fd) //用来判断串口有无数据的函数,直接复制黏贴过来的
{
int result ;
if (ioctl (fd, FIONREAD, &result) == -1)
return -1 ;
return result ;
}mjm_uart_tool.h:
int myserialOpen (const char *device, const int baud);
void serialSendstring (const int fd, const char *s);
int serialGetstring (const int fd, char *buffer);
int serialDataAvail (const int fd);serial_mjm_test.c:
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <pthread.h>
#include <errno.h>
#include "mjm_uart_tool.h"
void *read_serial(void *arg)
{
char *sendbuf;
sendbuf = (char *)malloc(32*sizeof(char));
while(1){
memset(sendbuf,'\0',32*sizeof(char));
fgets(sendbuf,sizeof(sendbuf),stdin);
serialSendstring (*((int *)arg), sendbuf) ;
}
pthread_exit(NULL);
}
void *write_serial(void *arg)
{
char readbuf[32] = {'\0'};
while(1){
while(serialDataAvail (*((int *)arg))){
serialGetstring (*((int *)arg),readbuf) ;
printf("-> %s\n",readbuf);
memset(readbuf,'\0',32);
}
}
pthread_exit(NULL);
}
int main ()
{
int fd ;
int ret;
pthread_t read_thread;
pthread_t write_thread;
if ((fd = myserialOpen ("/dev/ttyS5", 115200)) < 0) //打开驱动文件,配置波特率
{
fprintf (stderr, "Unable to open serial device: %s\n", strerror (errno)) ;
return 1 ;
}
/* if (wiringPiSetup () == -1)
{
fprintf (stdout, "Unable to start wiringPi: %s\n", strerror (errno)) ;
return 1 ;
}*/
ret = pthread_create(&read_thread,NULL,read_serial,(void *)&fd);
if(ret != 0){
printf("read_serial create error\n");
return 1;
}
ret = pthread_create(&write_thread,NULL,write_serial,(void *)&fd);
if(ret != 0){
printf("write_serial create error\n");
return 1;
}
pthread_join(read_thread,NULL);
pthread_join(write_thread,NULL);
return 0 ;
}注意,由于这里没有使用wiringPI库,所以编译不需要使用之前的build.sh脚本,直接使用gcc就可以,但是要记得链线程的库:
gcc serial_mjm_test.c mjm_uart_tool.c -lpthread
实现效果:
发送数据:

接收数据:
 文章来源:https://www.toymoban.com/news/detail-712445.html
文章来源:https://www.toymoban.com/news/detail-712445.html
可见,此时,我将serialOpen();serialPutchar();serialGetchar(),替换成了自己的myserialOpen();serialSendstring();serialGetstring();(还原封不动照搬了serialDataAvail函数),然后实现了和刚刚类似的效果,甚至还有所改进,因为我实现的接收函数可以直接介绍一整个字符串,所以可以在之前打印“->”用于区分,但是原来的serialgetchar是一个字符一个字符接收,很难实现这样的效果。文章来源地址https://www.toymoban.com/news/detail-712445.html
到了这里,关于使用香橙派 学习Linux的串口开发的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[香橙派开发系列]使用蓝牙和手机进行信息的交换](https://imgs.yssmx.com/Uploads/2024/02/834705-1.png)