- 调度表触发的任务在编译时就被静态定义,任务的触发时间和执行顺序是固定的。这种方式适用于已知的、固定的任务触发模式,例如周期性任务或事件驱动任务。
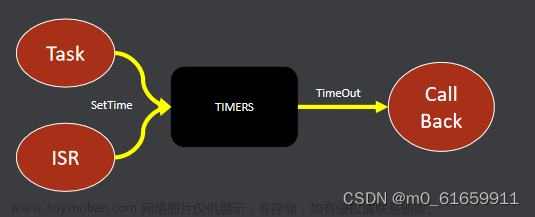
- 而使用 Alarm 机制触发的任务具有更大的灵活性。Alarm 允许在运行时动态地设置和修改任务的触发时间和间隔。这种方式适用于需要根据实时系统的动态变化来触发任务的场景,可以根据实际情况动态调整任务的触发时间,以满足实时性要求。
- 如果调度表的任务和 Alarm 的任务同时触发,通常会采用优先级规则来确定哪个任务先执行。具体的处理方式取决于操作系统的调度策略和任务的优先级设置。
- 调度表中任务是通过调度器触发的,而alarm的任务是通过计时器触发的。alarm的任务如何在运行时动态设置和修改触发时间和间隔,可能涉及到时间同步的东西。

- 由多alarm触发的多任务周期晃动很大,是由于高优先级任务抢占低优先级任务,导致低优先级任务要等高优先级任务执行完才能执行。首先,出现这种情况,肯定是对于任务的优先级和触发周期没有合理安排导致的。解决方法就是调整优先级和触发周期或改用调度表。
调度表的周期性任务与alarm周期性任务可以理解为,如果到了触发时间,如果有高优先级的任务抢占了低优先级的任务,调度表触发的任务会将任务挂起,之后等到下一个周期在重新执行,而alarm触发的任务是等高优先级任务执行完,就立即执行低优先级任务,alarm是基于全抢占调度机制实现的。如果调度表的周期任务与alarm的周期任务撞上了,调度表中的任务优先级高,那就是调度表的任务执行完后立即执行alarm的任务。
 文章来源:https://www.toymoban.com/news/detail-714799.html
文章来源:https://www.toymoban.com/news/detail-714799.html
 文章来源地址https://www.toymoban.com/news/detail-714799.html
文章来源地址https://www.toymoban.com/news/detail-714799.html
到了这里,关于OS的Alarm定时器调度机制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!