一、功能介绍
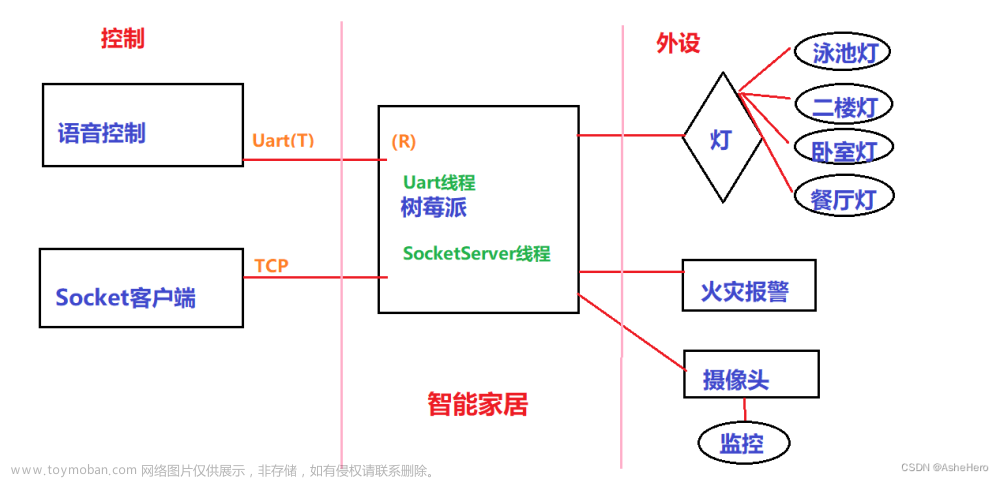
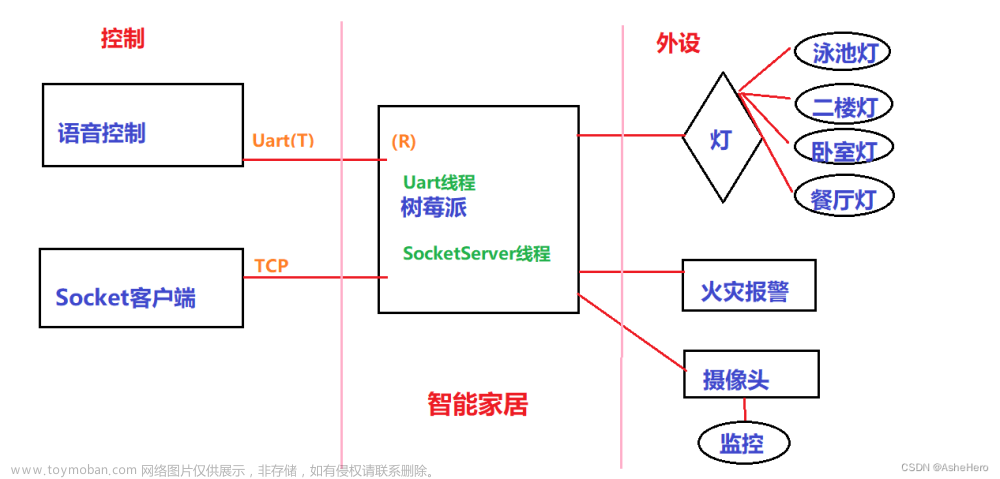
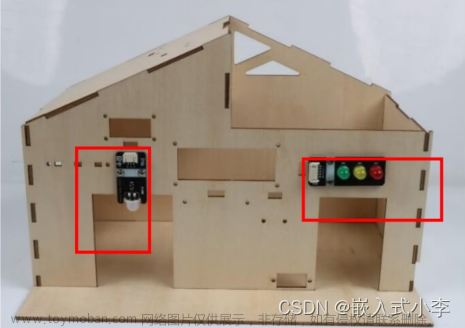
基于树莓派的智能家居。智能家居用到的硬件有:树莓派3B+、SU-03语音识别模块、pi 摄像头、继电器组、小灯、火焰传感器、蜂鸣器、电磁锁、超声波测距模块、DHT11温湿度检测模块,433M射频编解码模块或者红外模块,面包板等。
采用了简单工厂模式的一个设计方式。稳定,拓展性更强。通过工厂创建一个通用的接口,集中管理设备和指令。
创建了两个工厂:设备工厂和指令工厂。
设备工厂:用于管理卧室灯,餐厅灯,楼梯灯,浴室灯,火焰传感器,蜂鸣器,电磁锁,超声波,摄像头等设备。初始化的时候,通过链表将各个模块连接起来(头插法)。在要使用某个模块时,只需要使用链表遍历,找到所需模块去调用功能。
指令工厂:管理串口输入输出和socket客户端的指令输入和输出。
具体功能如下:
1、可通过SU-03语音模块的口令模式,口令+具体控制,通过串口把控制指令传给树莓派,来控制客厅、餐厅、二楼、浴室的灯
2、可通过SU-03语音模块的口令模式,通过串口把控制指令传给树莓派,树莓派再传递给射频模块(或者红外模块)控制窗帘,泳池灯,空调等。
3、可以通过socket客户端来发指令来控制客厅、餐厅、二楼、浴室的灯,可以在socket客户端看到摄像头实时监控画面,并且可以在客户端实时看到温度,湿度,火灾检测等数据。
4、火灾报警,当火焰传感器检测到火焰的时候,蜂鸣器会报警。
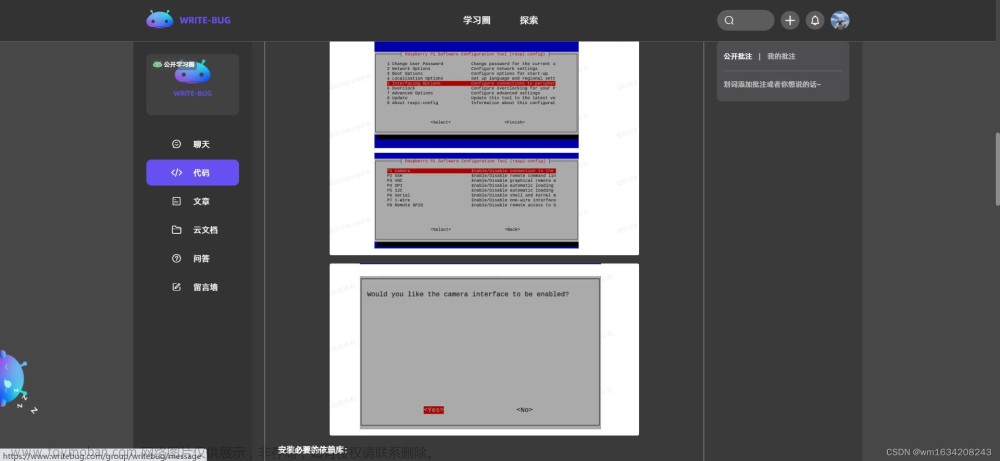
5、视频监控采用开源mjpg-Streamer来实现的,设置摄像头开机自启动,监控画面可在http://192.168.1.3:8080/?action=stream去看到
6、人脸识别开锁和监控,人脸识别功能是使用的翔云平台的人脸识别解决方案,需要安装libcurl 和 openSSl库来支持https协议,通过系统调用wget http://192.168.1.3:8080/?action=snapshot获取;
二、设计框图

三、程序实现
InputCommand.h:指令工厂
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <wiringPi.h>
struct InputCommander
{
char commandName[128];
char deviceName[128];//打开的设备名称
char command[32];//获取指令
char log[1024];
int baud;//波特率
int fd;
int s_fd;
char port[12];//端口号
char ipAddress[32];//ip地址
char temp[12];
char hum[12];
char fireIfOrNot[32];
int (*Init)(struct InputCommander *pInputCommand);
int (*getCommand)(struct InputCommander *pInputCommand);
int (*sendCommand)(struct InputCommander *pInputCommand);
struct InputCommander *next;
};
struct InputCommander * addSocketContrlToInputCommand(struct InputCommander * phead);
struct InputCommander * addVoiceContrlToInputCommand(struct InputCommander * phead);
contrlDevices.h(设备工厂):
#include <wiringPi.h>
struct Devices
{
char deviceName[128];
int status;
int pinNum;
int (*open)(int pinNum);
int (*close)(int pinNum);
int (*deviceInit)(int pinNum);
int (*readStatus)(int pinNum);
int (*changeStatus)(int pinNum);
struct Devices *next;
};
struct Devices * addBathroomLightToDeviceLink(struct Devices *phead);
struct Devices * addLivingroomLightToDeviceLink(struct Devices *phead);
struct Devices * addUpstairLightToDeviceLink(struct Devices *phead);
struct Devices * addRestaurantLightToDeviceLink(struct Devices *phead);
struct Devices * addFireIfOrNotToDeviceLink(struct Devices *phead);
struct Devices * addAlertToDeviceLink(struct Devices *phead);
struct Devices * addLockToDeviceLink(struct Devices *phead);
struct Devices * addCameraToDeviceLink(struct Devices *phead);
struct Devices * addCsbToDeviceLink(struct Devices *phead);
struct Devices * addDht11ToDeviceLink(struct Devices *phead);socketContrl.c
#include "InputCommand.h"
#include <wiringSerial.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <stdlib.h>
#include <string.h>
int socketInit(struct InputCommander *socketMes)
{
int s_fd;
struct sockaddr_in s_addr;
memset(&s_addr,0,sizeof(struct sockaddr_in));
//1. socket
s_fd = socket(AF_INET, SOCK_STREAM, 0);
if(s_fd == -1){
perror("socket");
exit(-1);
}
s_addr.sin_family = AF_INET;
s_addr.sin_port = htons(atoi(socketMes->port));
inet_aton(socketMes->ipAddress,&s_addr.sin_addr);
//2. bind
bind(s_fd,(struct sockaddr *)&s_addr,sizeof(struct sockaddr_in));
//3. listen
listen(s_fd,20);
printf("socket server listening...\n");
socketMes->s_fd = s_fd;
return s_fd;
}
struct InputCommander socketContrl={
.commandName = "socketServer",
.command={'\0'},
.port="8888",
.ipAddress="192.168.1.3",
.log={'\0',},
.Init =socketInit,
.temp={'\0'},
.hum={'\0'},
.fireIfOrNot={'\0'}
};
struct InputCommander * addSocketContrlToInputCommand(struct InputCommander * phead)
{
if(phead ==NULL){
return &socketContrl;
}else{
socketContrl.next = phead;
return &socketContrl;
}
}voiceContrl.c
#include "InputCommand.h"
#include <wiringSerial.h>
#include <unistd.h>
#include <string.h>
#include <stdlib.h>
#include <stdio.h>
#define SIZE 7
char Light_ON[7]={0xFD,0x03,0x55,0x55,0xC0,0x73,0xDF};
char Light_OFF[7]={0xFD,0x03,0x55,0x55,0x30,0x73,0xDF};
char CUR_ON[7]={0xFD,0x03,0x55,0x55,0x0C,0x73,0xDF};
char CUR_OFF[7]={0xFD,0x03,0x55,0x55,0x03,0x73,0xDF};
int voiceGetCommand(struct InputCommander *voicer)
{
int nread=0;
memset(voicer->command,'\0',sizeof(voicer->command));
nread=read(voicer->fd,voicer->command,sizeof(voicer->command));
return nread;
}
int voiceInit(struct InputCommander *voicer)
{
int fd;
if((fd =serialOpen(voicer->deviceName,voicer->baud))==-1){
perror("serial open error\n");
exit(-1);
}
voicer->fd = fd;
return fd;
}
int voiceSendCommand(struct InputCommander *voicer)
{
int n_write=0;
if(!strcmp(voicer->command,"s o")){
n_write=write(voicer->fd,Light_ON,7);
}else if(!strcmp(voicer->command,"s c")){
n_write=write(voicer->fd,Light_OFF,7);
}else if(!strcmp(voicer->command,"c o")){
n_write=write(voicer->fd,CUR_ON,7);
}else if(!strcmp(voicer->command,"c c")){
n_write=write(voicer->fd,CUR_OFF,7);
}
return n_write;
}
struct InputCommander voiceContrl={
.commandName = "voice",
.deviceName="/dev/ttyAMA0",
.baud=9600,
.command={'\0'},//指令清零
.log={'\0'},
.Init =voiceInit,
.getCommand = voiceGetCommand,
.sendCommand= voiceSendCommand,
.next =NULL
};
struct InputCommander * addVoiceContrlToInputCommand(struct InputCommander * phead)
{
if(phead ==NULL){
return &voiceContrl;
}else{
voiceContrl.next = phead;
return &voiceContrl;
}
}bathroomLight.c: livingroomLight.c,restaurantLight.c,upstairLight.c同
#include "contrlDevices.h"
#include <stdlib.h>
int bathroomLightOpen(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int bathroomLightClose(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int bathroomLightInitCloseInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,HIGH);
}
struct Devices bathroomLight=
{
.deviceName="bathroomLight",
.pinNum=21,
.open = bathroomLightOpen,
.close =bathroomLightClose,
.deviceInit=bathroomLightInitCloseInit,
};
struct Devices * addBathroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &bathroomLight;
}else{
bathroomLight.next=phead;
return &bathroomLight;
}
}
lock.c
#include "contrlDevices.h"
#include <stdlib.h>
int lockOpen(int pinNum)
{
pinMode(pinNum,OUTPUT);
//通电开锁,断电关锁;
digitalWrite(pinNum,HIGH);
digitalWrite(pinNum,LOW);
}
int lockClose(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int lockInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int lockReadStatus(int pinNum)
{
//高电平开,低电平为关
return digitalRead(pinNum);
}
struct Devices lock=
{
.deviceName="lock",
.pinNum=29,
.open = lockOpen,
.close =lockClose,
.deviceInit=lockInit,
.readStatus=lockReadStatus
};
struct Devices * addLockToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &lock;
}else{
lock.next=phead;
return &lock;
}
}
fire.c
#include "contrlDevices.h"
#include <stdlib.h>
#include <unistd.h>
int fireIfOrNotInit(int pinNum)
{
pinMode(pinNum,INPUT);
digitalWrite(pinNum,HIGH);
}
int fireStatusRead(int pinNum)
{
return digitalRead(pinNum);
//低电平为有火灾,高电平为无火灾
}
struct Devices fireIfOrNot=
{
.deviceName="fireIfOrNot",
.pinNum=25,
.deviceInit=fireIfOrNotInit,
.readStatus=fireStatusRead,
};
struct Devices * addFireIfOrNotToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &fireIfOrNot;
}else{
fireIfOrNot.next=phead;
return &fireIfOrNot;
}
}
csb.c
#include "contrlDevices.h"
#include <stdlib.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 27
#define Echo 28
int csbInit(int pinNum)
{
pinMode(Trig,OUTPUT);
pinMode(Echo,INPUT);
}
int getDistance(int pinNum)
{
//测量距离:2-400cm;
struct timeval tv1; //timeval是time.h中的预定义结构体 其中包含两个一个是秒,一个是微秒
struct timeval tv2;
long start, stop;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10); //发出超声波脉冲
digitalWrite(Trig, LOW);
while(digitalRead(Echo) != 1);
gettimeofday(&tv1, NULL); //获取当前时间 开始接收到返回信号的时候
while(digitalRead(Echo) != 0);
gettimeofday(&tv2, NULL); //获取当前时间 最后接收到返回信号的时候
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(stop - start) / 1000000 * 34000 / 2; //计算时间差求出距离
printf("dis=%.2f cm\n",dis);
if(dis>100){
return 1;
}else{
return 0;
}
}
struct Devices csb=
{
.deviceName="csb",
.deviceInit=csbInit,
.readStatus=getDistance//大于1米,返回1,小于1米 返回0;
};
struct Devices * addCsbToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &csb;
}else{
csb.next=phead;
return &csb;
}
}dht11.c
#include "contrlDevices.h"
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
unsigned long int databuf;
int DHT11_start(int pinNum)
{
pinMode(pinNum, OUTPUT); // set mode to output
digitalWrite(pinNum, HIGH); // output a high level
sleep(1);
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, LOW);
delay(25);
digitalWrite(pinNum, HIGH);
pinMode(pinNum, INPUT);
pullUpDnControl(pinNum, PUD_UP); //当引脚被配置为输入(INPUT)模式,使用函数pullUpDnControl来激活其内部的上拉电阻或下拉电阻
delayMicroseconds(27);
return 1;
}
/*
//主机接受数据
1.主机接受到从机回复的响应信号
2.格式0——54us的低电平+23到27us的高电平
格式1——54us的低电平+68到74us的高电平
3.思路:从识别到低电平开始,然后去除掉掉前面54秒的低电平还有
*/
int DHT11_read(int pinNum)
{
int crc, i;
if (0 == digitalRead(pinNum)) //主机接收到从机发送的响应信号(低电平)
{
while(!digitalRead(pinNum)); //主机接收到从机发送的响应信号(高电平)
for (i = 0; i < 32; i++)
{
while(digitalRead(pinNum)); //数据位开始的54us低电平
while(!digitalRead(pinNum)); //数据位开始的高电平就开始
delayMicroseconds(32); //跳过位数据,32us已经是数据0和数据1的差距点
databuf *= 2;
if (digitalRead(pinNum) == 1)
{
databuf++;
}
}
for (i = 0; i < 8; i++)
{
while (digitalRead(pinNum));
while (!digitalRead(pinNum));
delayMicroseconds(32);
crc *= 2;
if (digitalRead(pinNum) == 1)
{
crc++;
}
}
return 1;
}
else
{
return 0;
}
}
struct Devices dht11=
{
.deviceName="dht11",
.pinNum=0,
.deviceInit=DHT11_start,
.readStatus=DHT11_read
};
struct Devices * addDht11ToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &dht11;
}else{
dht11.next=phead;
return &dht11;
}
}
camera.c
#include "contrlDevices.h"
#include <stdlib.h>
#include <unistd.h>
#include <stdio.h>
#include <curl/curl.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
char buf[10240]={'\0'};
size_t readData( void *ptr, size_t size, size_t nmemb, void *stream)
{
strncpy(buf,ptr,1024);
}
char * base64Img(char *filename)
{
char cmd[128];
char *bufPic;
sprintf(cmd,"base64 %s >tmpFile",filename);
system(cmd);
int fd = open("./tmpFile",O_RDWR);
int filesize = lseek(fd,0,SEEK_END);
lseek(fd,0,SEEK_SET);
bufPic=(char *)malloc(sizeof(char)*filesize+2);
memset(bufPic,'\0',filesize+2);
read(fd,bufPic,filesize);
close(fd);
system("rm -f tmpFile");
return bufPic;
}
int postUrl(int pinNum)
{
CURL *curl;
CURLcode res;
int status;
char *postString;
char *key="PkRgwW5TLdU2kqLDpncZvz";
char *secret="2977c55e431f487194e5eea44a804328";
int typeId = 21;
char *format="xml";
char *img1=base64Img("./person1.jpg");
char *img2 = base64Img("./person2.jpg");
int len = strlen(key)+strlen(secret)+strlen(img1)+strlen(img2)+strlen(format);
postString =(char *)malloc(sizeof(char)*(len+124));
memset(postString,'\0',len+124);
sprintf(postString,"&img1=%s&img2=%s&key=%s&secret=%s&typeId=%d&format=%s",img1,img2,key,secret,typeId,format);
curl = curl_easy_init();
if (curl)
{
curl_easy_setopt(curl, CURLOPT_COOKIEFILE, "/tmp/cookie.txt"); // 指>定cookie文件
curl_easy_setopt(curl, CURLOPT_POSTFIELDS, postString); // 指定post内容
curl_easy_setopt(curl, CURLOPT_URL, "https://netocr.com/api/faceliu.do"); // 指定url
curl_easy_setopt(curl,CURLOPT_WRITEFUNCTION,readData);
res = curl_easy_perform(curl);
if(strstr(buf,"是")!=NULL){
printf("camera:same person\n");
status=1;
}else{
printf("camera:diff person\n");
status =0;
}
curl_easy_cleanup(curl);
}
return status;
}
int camera_readStatus(int pinNum)
{
int status;
system(" wget -O ./person1.jpg http://192.168.1.3:8080/?action=snapshot");
printf("take ptoto success\n");
status = postUrl(pinNum);
return status;
}
struct Devices camera=
{
.deviceName="camera",
.readStatus=camera_readStatus//1是同一个人,开锁,0不是同一个人,关锁;
};
struct Devices * addCameraToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &camera;
}else{
camera.next=phead;
return &camera;
}
}
主程序MainPro.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include "contrlDevices.h"
#include "InputCommand.h"
#include <wiringSerial.h>
extern unsigned long int databuf;
struct Devices *pdeviceHead = NULL;
struct InputCommander *pCommandHead=NULL;
struct InputCommander *socketHandler;
struct InputCommander *voiceHandler;
struct Devices *fireHandler;
int c_fd;
struct Devices * findDevicesByName(char *str,struct Devices * phead)
{
struct Devices *tmp = phead;
if(tmp == NULL){
printf("find devices error\n");
return NULL;
}else{
while(tmp!=NULL){
if(!strcmp(tmp->deviceName,str)){
return tmp;
}
tmp=tmp->next;
}
}
}
struct InputCommander * findInputCommanderByName(char *str,struct InputCommander * phead)
{
struct InputCommander *tmp = phead;
if(tmp == NULL){
printf("find InputCommander error\n");
return NULL;
}else{
while(tmp!=NULL){
if(!strcmp(tmp->commandName,str)){
return tmp;
}
tmp=tmp->next;
}
}
}
void openDevices(char *deviceName)
{
struct Devices *deviceHandler;
deviceHandler=findDevicesByName(deviceName,pdeviceHead);
deviceHandler->deviceInit(deviceHandler->pinNum);
deviceHandler->open(deviceHandler->pinNum);
}
void closeDevices(char *deviceName)
{
struct Devices *deviceHandler;
deviceHandler=findDevicesByName(deviceName,pdeviceHead);
deviceHandler->deviceInit(deviceHandler->pinNum);
deviceHandler->close(deviceHandler->pinNum);
}
void cmdContrlLight(char cmd[12])
{
if(!strcmp(cmd,"b o")){
openDevices("bathroomLight");
}else if(!strcmp(cmd,"b c")){
closeDevices("bathroomLight");
}else if(!strcmp(cmd,"l o")){
openDevices("livingroomLight");
}else if(!strcmp(cmd,"l c")){
closeDevices("livingroomLight");
}else if(!strcmp(cmd,"r o")){
openDevices("restaurantLight");
}else if(!strcmp(cmd,"r c")){
closeDevices("restaurantLight");
}else if(!strcmp(cmd,"u o")){
openDevices("upstairLight");
}else if(!strcmp(cmd,"u c")){
closeDevices("upstairLight");
}
}
void *read_thread(void *datas)
{
int n_read;
while(1){
memset(socketHandler->command,0,sizeof(socketHandler->command));
n_read = read(c_fd,socketHandler->command, sizeof(socketHandler->command));
if(n_read == -1){
perror("read");
}else if(n_read>0){
printf("socket get cmd: %s\n",socketHandler->command);
cmdContrlLight(socketHandler->command);
}else{
printf("client quit\n");
break;
}
}
}
void *write_thread(void *datas)
{
struct Devices *dht11Handler;
int n_write;
char message[128]={'\0'};
dht11Handler = findDevicesByName("dht11",pdeviceHead);
while(1){
dht11Handler->deviceInit(dht11Handler->pinNum);
dht11Handler->readStatus(dht11Handler->pinNum);
memset(socketHandler->hum,'\0',12);
memset(socketHandler->temp,'\0',12);
memset(socketHandler->fireIfOrNot,'\0',32);
//低电平为有火灾,高电平为无火灾
if(fireHandler->readStatus(fireHandler->pinNum)){
strcpy(socketHandler->fireIfOrNot,"fire watching...");
}else{
strcpy(socketHandler->fireIfOrNot,"fire warning!!!Attention!");
}
sprintf(socketHandler->temp,"%d.%d°C", (databuf >> 8) & 0xff, databuf & 0xff);
sprintf(socketHandler->hum,"%d.%d%rh",(databuf >> 24) & 0xff, (databuf >> 16) & 0xff);
sprintf(message,"%s,%s,%s",socketHandler->temp,socketHandler->hum,socketHandler->fireIfOrNot);
printf("message:%s\n",message);
write(c_fd,message,strlen(message));
sleep(10);
}
}
void *socket_thread(void *datas)
{
pthread_t readThread;
pthread_t writeThread;
struct sockaddr_in c_addr;
int n_read = 0;
int clen = sizeof(struct sockaddr_in);
memset(&c_addr,0,clen);
socketHandler=findInputCommanderByName("socketServer",pCommandHead);
if(socketHandler==NULL){
printf("find socketHandler error\n");
pthread_exit(NULL);
}else{
socketHandler->Init(socketHandler);
printf("%s init success\n",socketHandler->commandName);
while(1){
//不断接收新的客户端的接入,接入新的客户端后创建新的读线程和写线程:
c_fd = accept(socketHandler->s_fd,(struct sockaddr *)&c_addr,&clen);
if(c_fd == -1){
perror("accept");
}
pthread_create(&readThread,NULL,read_thread,NULL);
pthread_create(&writeThread,NULL,write_thread,NULL);
}
}
}
void *voice_thread(void *datas)
{
int nread;
voiceHandler=findInputCommanderByName("voice",pCommandHead);
if(voiceHandler==NULL){
printf("find voiceHandler error\n");
pthread_exit(NULL);
}else{
if(voiceHandler->Init(voiceHandler)<0){
printf("voice init error\n");
pthread_exit(NULL);
}else{
printf("%s init success\n",voiceHandler->commandName);
}
while(1){
nread=voiceHandler->getCommand(voiceHandler);
if(nread==0){
//printf("no data from voice\n");
}else{
printf("voice get cmd: %s\n",voiceHandler->command);
voiceHandler->sendCommand(voiceHandler);
cmdContrlLight(voiceHandler->command);
}
}
}
}
void *fire_thread(void *datas)
{
struct Devices *alertHandler;
fireHandler=findDevicesByName("fireIfOrNot",pdeviceHead);
alertHandler=findDevicesByName("alert", pdeviceHead);
fireHandler->deviceInit(fireHandler->pinNum);
alertHandler->deviceInit(alertHandler->pinNum);
while(1)
{
int status;
status = fireHandler->readStatus(fireHandler->pinNum);
if(!status){
//有火灾,打开报警器:
alertHandler->open(alertHandler->pinNum);
}else{
//无火灾:关闭报警器:
alertHandler->close(alertHandler->pinNum);
}
}
}
void *camera_thread(void * datas)
{
struct Devices *cameraHandler;
struct Devices *lockHandler;
struct Devices *csbHandler;
cameraHandler=findDevicesByName("camera",pdeviceHead );
lockHandler=findDevicesByName("lock",pdeviceHead);
csbHandler=findDevicesByName("csb",pdeviceHead);
lockHandler->deviceInit(lockHandler->pinNum);
csbHandler->deviceInit(csbHandler->pinNum);
while(1){
//距离大于1米,返回1;
while(! csbHandler->readStatus( csbHandler->pinNum)){
printf("dis<1m,taking photo...\n");
lockHandler->status=lockHandler->readStatus(lockHandler->pinNum);//检测锁的状态
cameraHandler->status=cameraHandler->readStatus(cameraHandler->pinNum);//对比人脸;
//1:是同一个人,开 锁,0:不是同一个人,关锁;
//1:锁是开状态,0:锁是关闭状态;
if( cameraHandler->status && !lockHandler->status){
lockHandler->open(lockHandler->pinNum);
printf("open lock\n");
}
}
sleep(10);//每10秒检测一次距离,距离小于1米就拍照对比
}
}
int main()
{
pthread_t voiceThread;
pthread_t socketThread;
pthread_t fireIfOrNotThread;
pthread_t cameraThread;
if(wiringPiSetup()==-1){
printf("wiringPi init error\n");
exit(-1);
}
//1.指令工厂初始化
pCommandHead= addSocketContrlToInputCommand(pCommandHead);
pCommandHead=addVoiceContrlToInputCommand(pCommandHead);
//2.设备控制工厂初始化
pdeviceHead=addBathroomLightToDeviceLink(pdeviceHead);
pdeviceHead=addLivingroomLightToDeviceLink(pdeviceHead);
pdeviceHead=addUpstairLightToDeviceLink(pdeviceHead);
pdeviceHead=addRestaurantLightToDeviceLink(pdeviceHead);
pdeviceHead=addFireIfOrNotToDeviceLink(pdeviceHead);
pdeviceHead=addAlertToDeviceLink(pdeviceHead);
pdeviceHead=addLockToDeviceLink(pdeviceHead);
pdeviceHead=addCameraToDeviceLink(pdeviceHead);
pdeviceHead=addCsbToDeviceLink(pdeviceHead);
pdeviceHead=addDht11ToDeviceLink(pdeviceHead);
//3.线程池建立
//3.1语音线程
pthread_create(&voiceThread,NULL, voice_thread,NULL);
//3.2socket 线程
pthread_create(&socketThread,NULL, socket_thread,NULL);
//3.3摄像头线程
pthread_create(&cameraThread,NULL,camera_thread,NULL);
//3.4火灾线程
pthread_create(&fireIfOrNotThread,NULL,fire_thread,NULL);
//等待线程退出:
pthread_join(voiceThread,NULL);
pthread_join(socketThread,NULL);
pthread_join(fireIfOrNotThread,NULL);
pthread_join(cameraThread,NULL);
return 0;
}四、客户端
(37条消息) 智能家居Android设计_lelebanaba的博客-CSDN博客w文章来源:https://www.toymoban.com/news/detail-717042.html
五、项目演示
智能家居文章来源地址https://www.toymoban.com/news/detail-717042.html
到了这里,关于基于树莓派的智能家居项目及代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!