基于Matlab的A*算法实现机器人在栅格地图上的三维路径规划
一、引言
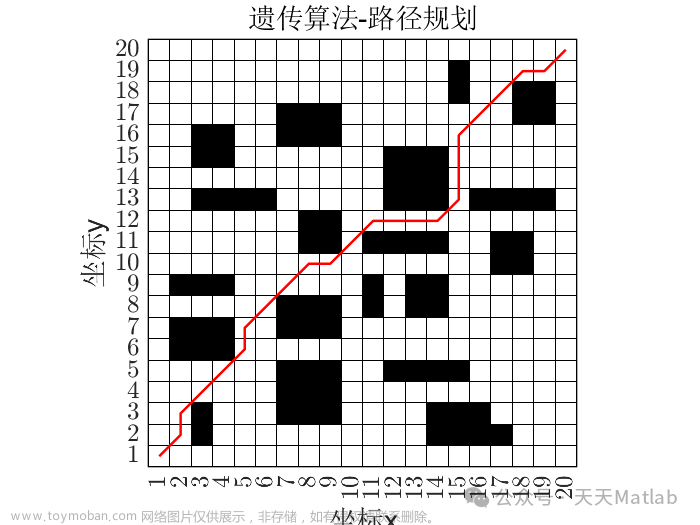
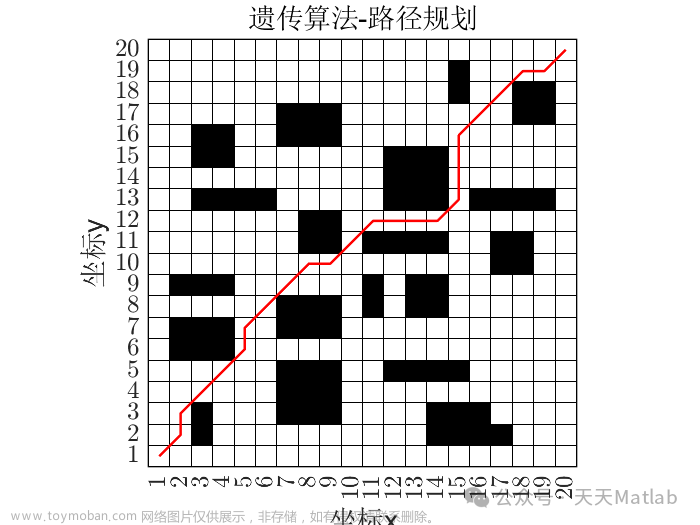
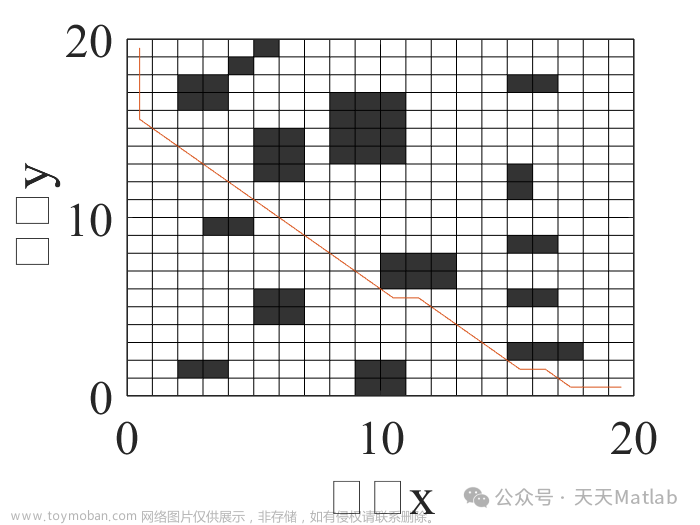
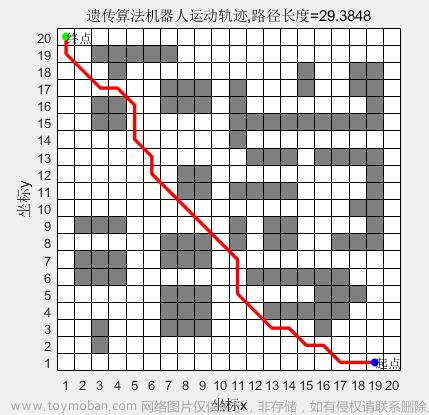
路径规划是机器人领域中的一个重要问题,尤其是在三维环境中。A*(A-star)算法是一种常用且高效的路径规划算法,可以帮助机器人在给定的栅格地图上找到最短路径。本文将介绍如何使用Matlab来实现A*算法,并在三维栅格地图上进行路径规划。
二、A算法原理
A算法是一种启发式搜索算法,它基于Dijkstra算法,但通过引入估计函数(启发函数)来优化搜索过程。该算法利用了两个函数:g(n)表示从起点到节点n的实际代价,h(n)表示从节点n到目标节点的估计代价。A*算法会选择具有最小的f(n) = g(n) + h(n)值的节点进行扩展。其中,h(n)是通过一些启发式方法(如曼哈顿距离、欧氏距离等)进行估计。算法会持续扩展节点,直到找到目标节点或者无可扩展的节点为止。
三、Matlab实现A*算法的关键步骤
-
创建栅格地图
首先,我们需要准备一个三维的栅格地图,其中包含了机器人运动的障碍物和目标点。可以使用Matlab提供的绘图函数来创建栅格地图。文章来源:https://www.toymoban.com/news/detail-717978.html -
实现A算法
在Matlab中,我们可以使用图像处理工具箱提供的函数来实现A算法。主要包括以下步骤:
(1)初始化起始节点和目标节点。
(2)创建一个开放列表openList和一个关闭列表closedList来保存待扩展的节点。
(3)将起始节点加入到openList中。
(4)循环执行以下步骤:文章来源地址https://www.toymoban.com/news/detail-717978.html- 从openList中选择具有最小f(n)值的节点作为当前节点,并将其
到了这里,关于基于Matlab的A*算法实现机器人在栅格地图上的三维路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!