作者:禅与计算机程序设计艺术
一、简介
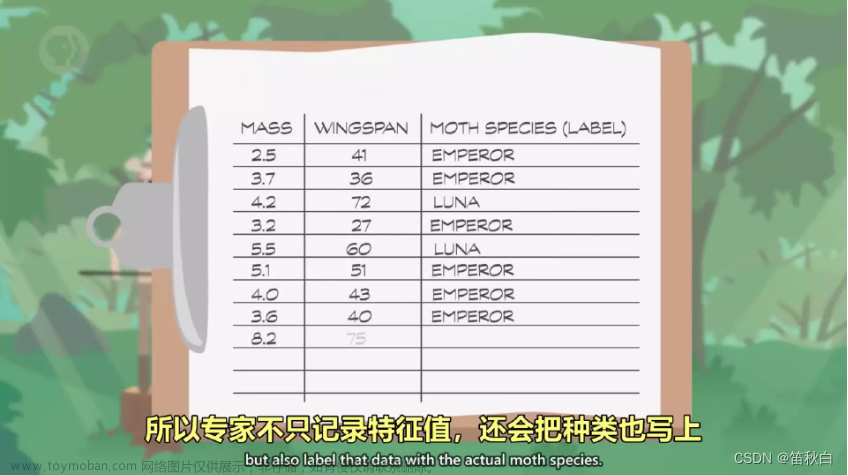
目前,人类在收集和处理图像数据方面已经取得了非常大的进步。随着技术的不断迭代升级,机器视觉系统也在迅速发展。人工智能领域的研究者们正在将这些技术应用到工业领域,其中就包括机器人的视觉处理方面。由于机器人本身是个动态多变的物体,因此它的视觉输入也会随着环境的变化而不断更新。如何使得机器人能够准确识别、跟踪和理解其周遭世界中的各种信息,成为十分重要的问题。
二、相关研究
人类在日常生活中都可以感知到大量的视觉信息,例如我们用双眼看到的物体、听到的声音、以及用肢体做出的动作。而对于机械工业生产型机器人来说,它只能通过传感器获取的信息来进行运动控制,不能完整地模拟人类的视觉系统。所以,如何让机器人像人一样具备视觉感知能力,进而让它具有自主决策能力和执行任务的能力,仍然是一个重要课题。
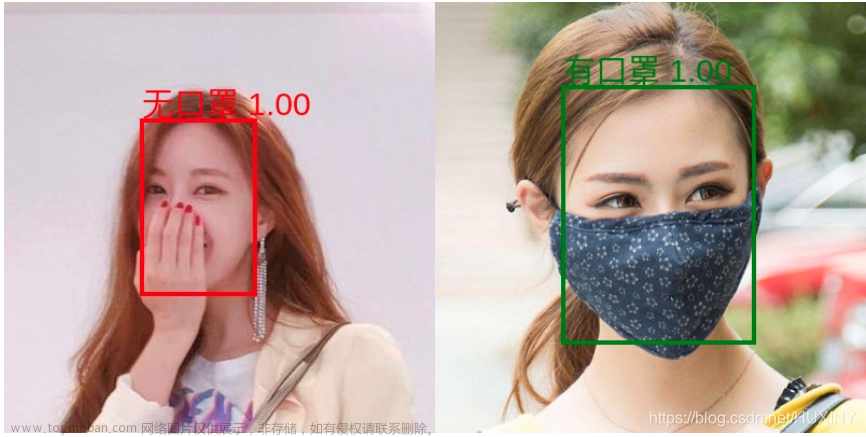
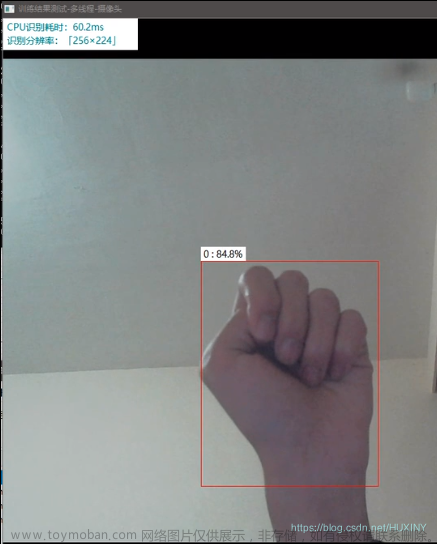
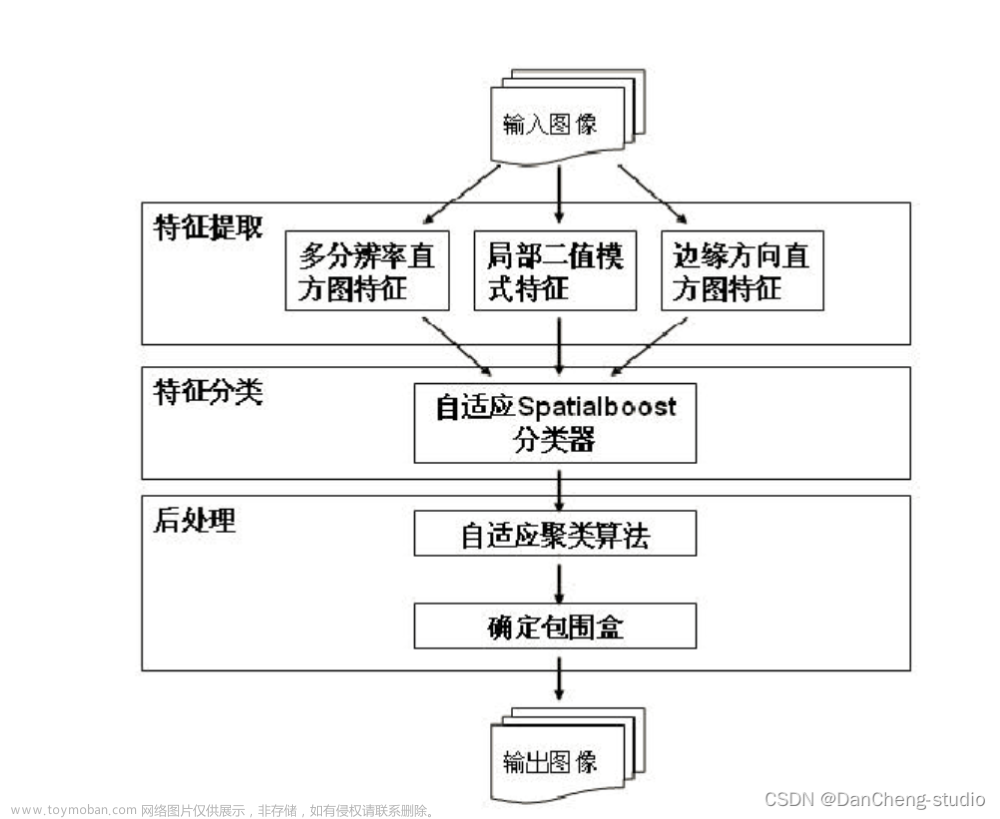
目前,主流的方法论主要集中在基于深度学习的目标检测、跟踪、分类等方法上。然而,这些方法仍存在一些局限性。首先,需要大量的训练数据,手动标注复杂、耗时且容易出错;其次,检测速度慢,尤其是在高分辨率图像下;最后,由于没有模型之间的一致性,不同算法之间的结果差距过大。因此,如何设计一个统一的、高效、准确且适应未来的机器视觉系统,这是当前研究的一个关键难点。文章来源:https://www.toymoban.com/news/detail-718746.html
近年来,人工智能领域的多个学者提出了不同的视觉方法。例如,2017 年发表于 CVPR 的 YOLOv3 使用卷积神经网络 (CNN) 来检测目标并回归目标的边界框和类别概率分布。后来,Facebook 提出的用于对象检测的 DSOD 方法通过堆叠多个深层网络来提升性能。2019 年发表于 ICCV 的 Mask R-CNN 用 Faster RCNN 作为基础文章来源地址https://www.toymoban.com/news/detail-718746.html
到了这里,关于基于计算机视觉的机器人视觉:实现对机器人视觉的理解和应用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!