😶🌫️说在最前面 + 实现功能
最近在埋头搞STM32 + 无刷直流电机控制,想实现用自己的STM32F407VGT6芯片板子,外加一块驱动板(目前选用到TI的DRV8302或者DRV8323驱动芯片),搞定电机驱动,最后实现比较好的控制效果。如果不是同一块芯片的同学也不用急着走,大体上都是可借鉴哒~
本文主要实现使用SPI通信,通过STM32F407控制芯片来对DRV8323S驱动芯片进行配置,为使用DRV8323做好准备。
目标操作: 不启动电机,仅使能DRV8323S芯片。使用SPI朝DRV8323S芯片写几个地址的配置,然后再读取这几个位置的状态,检查是否通信正常。调试过程借助Keil的Debug功能中 watch变量的值,或使用UASRT串口通信打印出信息,来检查。
如果文章中有什么错误和待改进的地方,欢迎在评论区指出交流,共同学习和进步!✊
首先是一系列用CubeMX的配置操作。
👀 1 CubeMX - RCC & Clock Configuration时钟配置
🥽 1.1 【System Core】 – 【RCC】
HSE – Crystal/Ceramic Resonator
高速时钟源 – 外部晶振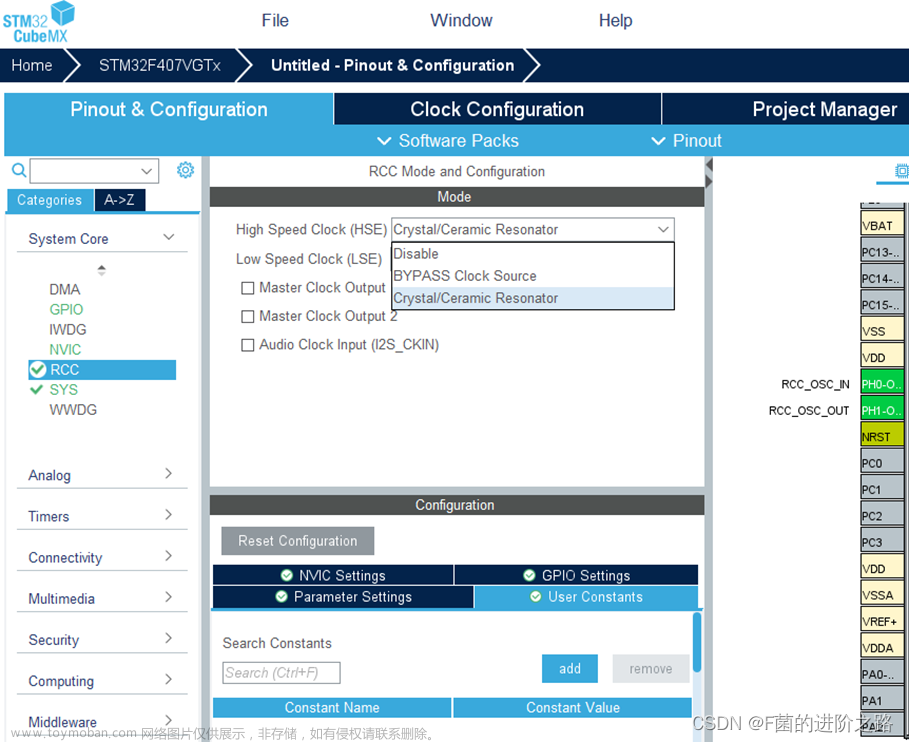
会自动分配好管脚RCC_OSC_IN & RCC_OSC_OUT:
PH0 – RCC_OSC_IN
PH1 – RCC_OSC_OUT.
🥽 1.2 【Clock Configuration】
系统定时器配置Cortex System timer – 168MHz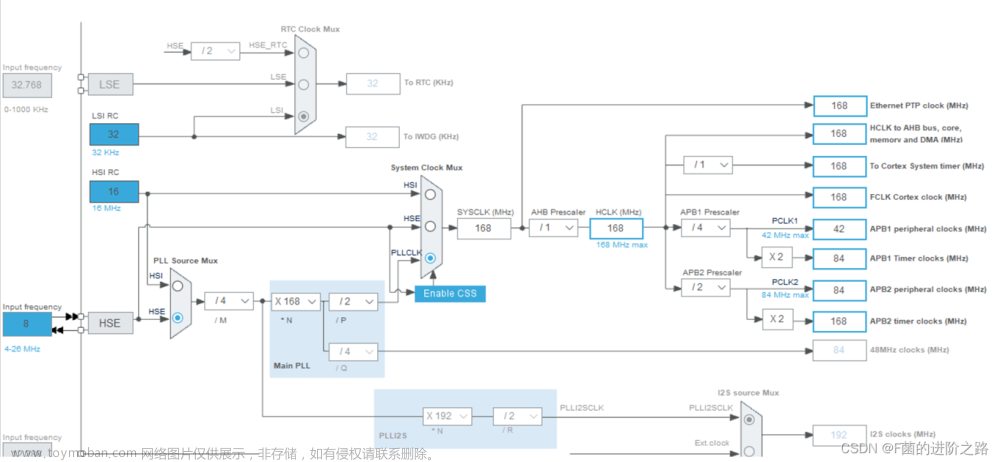
👀 2 CubeMX -SYS Debug设置
🌠>> SYS Mode and Configuration
Debug – Serial Wire
Timebase Source – SysTick(后续若使用到RTOS,则需改成如TIM7的没用到的定时器!)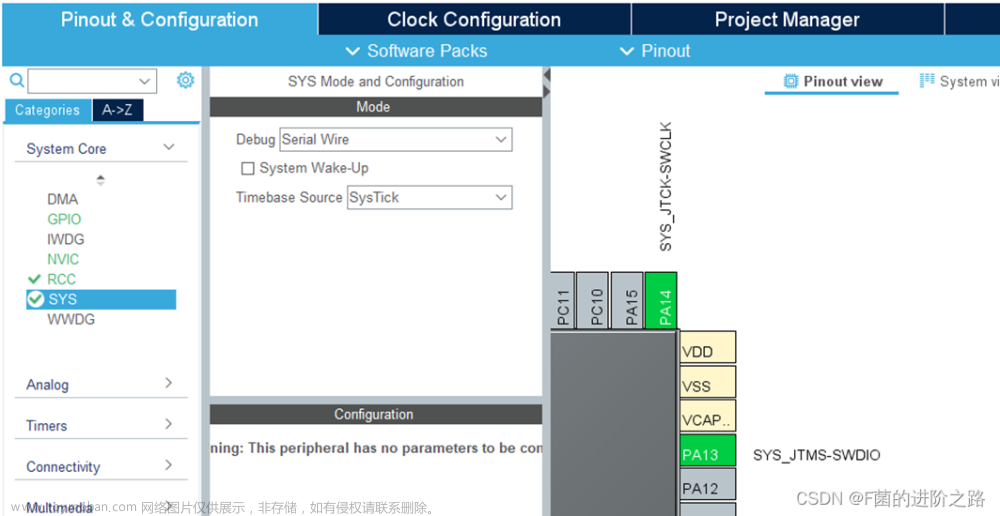
👀 3 CubeMX -UART通讯设置
USART3 —— 暂定用它接收(来自上位机的)控制电机指令
PD8-USART3_TX
PD9-USART3_RX
🌠>> USART3 – Mode
| Item | Setting |
|---|---|
| Mode | Asynchronous异步模式 |
| Hardware Flow Control (RS232) | Disable |
🌠>> Parameter Settings – Basic Parameters
| Item | Setting |
|---|---|
| Baud Rate | 115200 Bits/s |
| Word Length | 8 Bits (including Parity) |
| Parity | None |
| Stop Bits | 1 |
🌠>> Parameter Settings – Advanced Parameters
| Item | Setting |
|---|---|
| Data Direction | Receive and Transmit |
| Over Sampling | 16 Samples |
🌠>> NVIC Settings
中断使能,优先级(0,0)。
🌠>> GPIO Settings
| Item | Setting |
|---|---|
| GPIO mode | Alternate Function Push Pull |
| GPIO Pull-up/Pull-down | Pull-up 注意⭐ |
| Maximum output speed | Very high |
👀 4 CubeMX - TIM定时器设置
TIM8-PWM+TIM4-HALL+TIM6简单定时
本文暂时略
👀 5 CubeMX - GPIO设置
KEY+LED+PWM低桥臂
本文暂时略
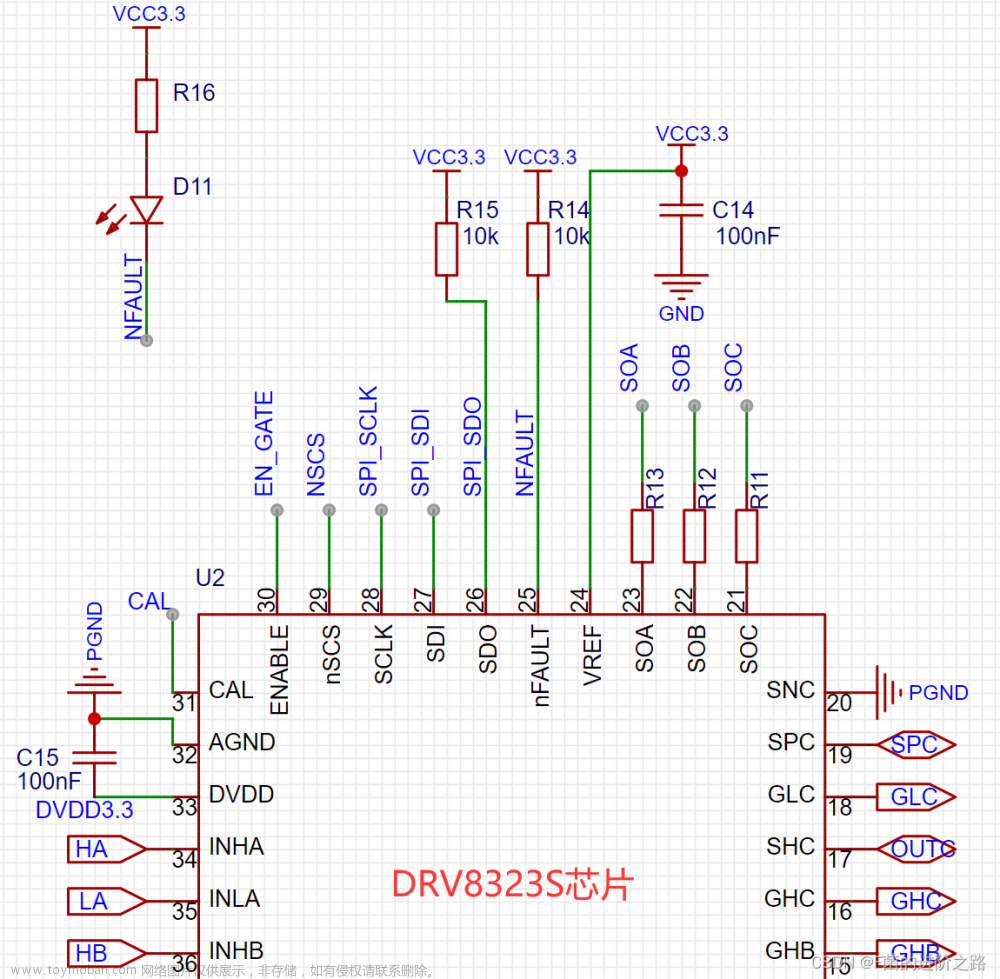
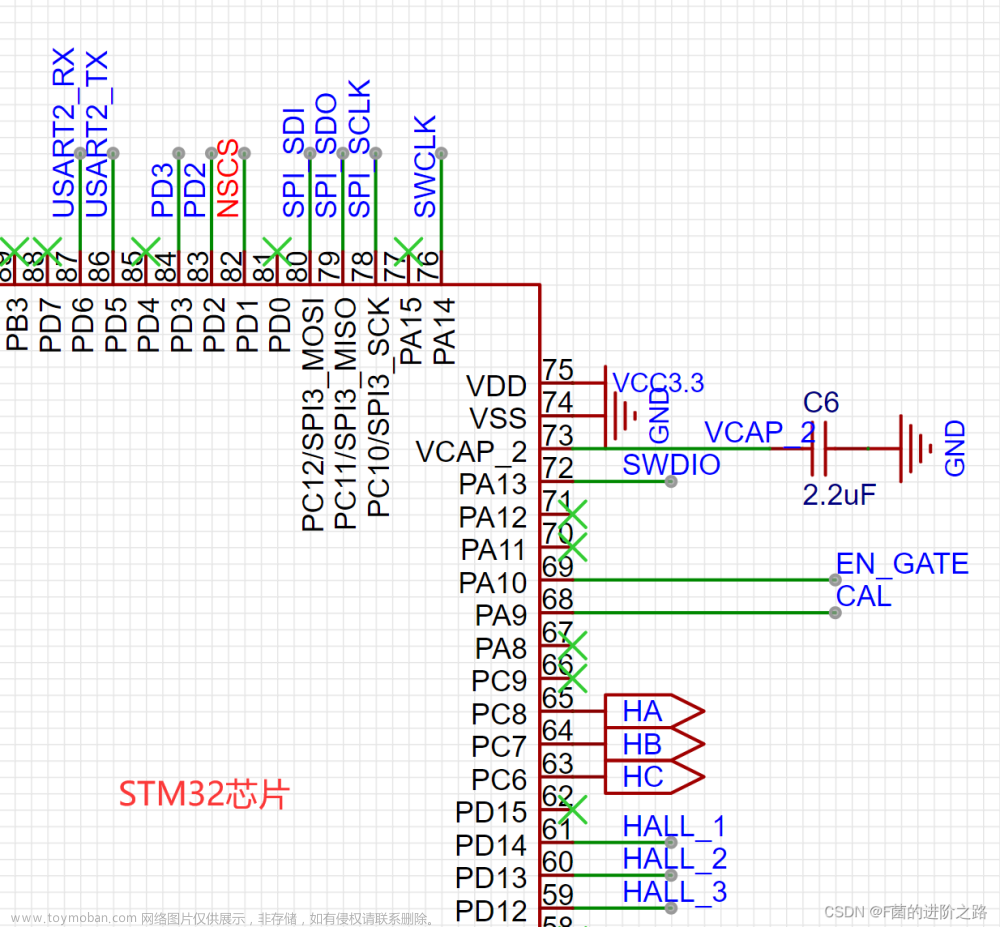
👀 6 CubeMX - GPIO设置:连接DRV8323S的一些端口⭐


🥽 6.1 (STM32 - out) PA9 👈–👉 CAL (DRV8323S - in)
放大器校准输入。设置逻辑高时,内部短接放大器输入,并执行自动偏移校准。完成校准后引脚还要恢复低位,才能正常执行后续测量操作。
🪜详见数据手册【8.3.4.3 Auto Offset Calibration – P44】
🌠>> GPIO Settings
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | Low(引脚低电平) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | High(引脚高速) |
暂时不用自动校准功能!因此初始就让PA9输出低电平。
🥽6.2 (STM32 - out) PA10 👈–👉 ENABLE (DRV8323S – in,EN_GATE)
栅极驱动器启用。当该引脚为逻辑低时,设备进入低功率睡眠模式。8至40µs的低脉冲可用于重置故障条件。
🪜详见数据手册【8.4.1.1 Sleep Mode – P50】

🌠>> GPIO Settings
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | Low(引脚低电平) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | High(引脚高速) |
初始让PA10输出低电平,要使能DRV8323S芯片时,把引脚输出改为高电平。
🥽6.3 (STM32 - X) 无 👈–👉 nFAULT (DRV8323S – open-drain output) – 单片机连D11发光二极管
暂时不额外连STM32引脚来读状态(应该也可以连?目前我的板子版本未连),如果发光二极管D11亮了,则说明出故障了。
🪜详见数据手册【8.3.6 Gate Driver Protective Circuits – P47】
外部硬件电路给他上拉了,出现故障时,nFAULT pin输出逻辑低,对应发光二极管D11亮。
👀 7 CubeMX - SPI通信设置:用来和DRV8323通讯,配置PWM+发送错误信息⭐
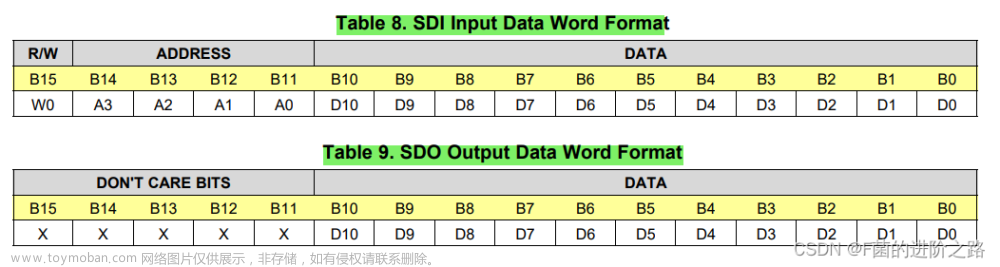
🪜相关寄存器的配置备忘详见我的另一篇Blog:【DRV8323】电机驱动芯片寄存器配置指南,通过STM32F407的SPI通信配置。
SPI - Serial Peripheral Interface串行外围设备接口
SPI3是APB1上的设备,APB1 peripheral clocks = 42MHz,最高通信速率为 21Mbits/s。
SPI3_nSCS需要用GPIO单独配置,另外三个是SPI3自动配置的。
| 引脚名 | STM32自命名 | 原理图中引脚命名 |
|---|---|---|
| PD1 | SPI3_nSCS | NSCS(片选)【❗这个是GPIO_Output单独设!】 |
| PC10 | SPI3_SCK | SPI_SCLK (时钟) |
| PC11 | SPI3_MISO | SPI_SDO (从机DRV8323输出数据,主机STM32输入。连DRV8323的SDO口) |
| PC12 | SPI3_MOSI | SPI_SDI (主机STM32输出数据,发给从机DRV8323。连DRV8323的SDI口) |
🥽7.1 Connectivity – SPI 3
🌠>> SPI3 – Mode
| Item项目 | Setting设定 |
|---|---|
| Mode | Full-Duplex Master (全双工主机模式) |
| Hardware NSS Signal | Disable(不是硬件控制) |
🌠>> Parameter Settings – Basic Parameters
| Item项目 | Setting设定 |
|---|---|
| Frame Format | Motorola |
| Data Size | 16 Bits |
| First Bit | MSB First |
🌠>> Parameter Settings – Clock Parameters
| Item项目 | Setting设定 |
|---|---|
| Prescaler (for Baud Rate) | 16 (❗一定要至少选16,稍微小一点都会因为太快了数据出错!) |
| Baud Rate | 2.625 MBits/s |
| Clock Polarity (CPOL) | Low (空闲态时,SCLK处于低电平) |
| Clock Phase (CPHA) | 2 Edge(CPHA=1) |
🌠>> Parameter Settings – Advanced Parameters
| Item项目 | Setting设定 |
|---|---|
| CRC Calculation | Disabled |
| NSS Signal Type | Software |

🥽7.2 System Core – GPIO

🌠>> GPIO - PD1 Configuration
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | High(初始状态引脚高电平,低电平有效) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | Very High |
| User Label | SPI3_nSCS |
🌠>> GPIO - SPI - PC10&PC11&PC12 Configuration
(?作者存疑点:PC11在CubeMX默认是输出状态?实现功能来说应该是输入)
| Item项目 | Setting设定 |
|---|---|
| GPIO mode | Alternate Function Push Pull |
| GPIO Pull-up/Pull-down | No Pull-up and no Pull-down |
| Maximum output speed | Very High |
👀 8 Keil - SPI通信相关代码摘录
【motor_drv8323.c】代码(含寄存器和HAL库函数对比的详细版本)👇
/**
******************************************************************************
* @file motor_drv8323.c
* @date 2023-05-08
* @brief 驱动芯片DRV8323相关 - STM32 F407
******************************************************************************
*/
#include "motor_drv8323.h"
uint16_t TIMP01, TIMP02, TIMP03, TIMP04, TIMP05;
uint16_t TIMP1, TIMP2, TIMP3, TIMP4, TIMP5;
/**
* @brief 【MOTOR-DRV8323 SPI通信】
* 配置 DRV8323工作状态
* @function 0 - SPI读&写一体化函数 16位 - HAL库函数版本
* @function 1 - SPI 读 & 写16bit函数 - 寄存器版本
* @function 2 - DRV8323写入函数 16位 - 寄存器版本
* @function 3 - DRV8323读取函数 16位 - 寄存器版本
* @function 4 - SPI功能异常提示函数
* @function 5 - 用SPI配置DRV8323的函数 (操作封装)
*/
// 0 - SPI读&写一体化函数 16位 - HAL库函数版本 【要么用后三个,要么就用这个】
uint16_t SPI_ReadWrite_DRV8323(uint16_t ReadAddr)
{
uint16_t value;
SPI3_nSCS_LOW(); // SPI3-nSCS 拉低使能 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_RESET);
//HAL_Delay(500); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
HAL_SPI_TransmitReceive(&hspi3, (uint8_t*)&ReadAddr, (uint8_t*)&value, 1, 1000); // 通过一个强制转换“骗过”库函数接口
//HAL_Delay(500); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
SPI3_nSCS_HIGH(); // SPI3-nSCS 拉高关断 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_SET);
HAL_Delay(500);
return value;
}
// 1 - SPI读&写16bit函数 - 寄存器版本
uint16_t SPI_ReadWrite16bit(uint16_t ReadAddr)
{
int SPITimeout = SPIT_FLAG_TIMEOUT; // 等待超时时间 设为0x1000
// Loop while DR register in not emplty 等待发送缓冲区为空,TXE 事件
while (__HAL_SPI_GET_FLAG( &hspi3, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0)
{ SPI_ERROR_UserCallback(); return 0; }
}
// Send Half Word through the SPIx peripheral 写入数据寄存器,把要写入的数据写入发送缓冲区
WRITE_REG(hspi3.Instance->DR, ReadAddr);
SPITimeout = SPIT_FLAG_TIMEOUT;
// Wait to receive a Half Word 等待接收缓冲区非空,RXNE 事件
while (__HAL_SPI_GET_FLAG( &hspi3, SPI_FLAG_RXNE ) == RESET)
{
if((SPITimeout--) == 0)
{ SPI_ERROR_UserCallback(); return 0; }
}
// Return the Half Word read from the SPI bus 读取数据寄存器,获取接收缓冲区数据
return READ_REG(hspi3.Instance->DR);
}
// 2 - DRV8323写入函数 16位 - 寄存器版本
uint16_t SPI_WRITE_DRV8323(uint16_t WriteData)
{
uint16_t RxData;
SPI3_nSCS_LOW(); // SPI3-nSCS 拉低使能
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
SPI_ReadWrite16bit(WriteData);
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
SPI3_nSCS_HIGH(); // SPI3-nSCS 拉高关断
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
return RxData; // 对于Write操作不用有返回值,这里有只是更方便调试观察,看看是否正确写入
}
// 3 - DRV8323读取函数 16位 - 寄存器版本
uint16_t SPI_Read_DRV8323(uint16_t ReadAddr)
{
uint16_t RxData;
SPI3_nSCS_LOW(); // SPI3-nSCS 拉低使能
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
RxData = SPI_ReadWrite16bit(ReadAddr);
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
SPI3_nSCS_HIGH(); // SPI3-nSCS引脚拉高,因为不用它了
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
return RxData;
}
// 4 - SPI功能异常提示函数
void SPI_ERROR_UserCallback(void)
{
/* 等待超时后的处理,输出错误信息 */
printf("SPI 通信异常! \r\n");
}
// 5 - 用SPI设置DRV8323的函数 (操作封装)
void Set_DRV8323(void)
{
//库函数版本测试代码
Drv8323_ENABLE();//使能Drv-Enable输入高电平,驱动芯片开始工作
HAL_Delay(1000);
//SPI_ReadWrite_DRV8323(Dummy_Byte);HAL_Delay(500);
// TIMP1 = SPI_ReadWrite_DRV8323(0x9000);//取地址0x02
// TIMP2 = SPI_ReadWrite_DRV8323(0x9800);//取地址0x03
// TIMP3 = SPI_ReadWrite_DRV8323(0xA000);//取地址0x04
// TIMP4 = SPI_ReadWrite_DRV8323(0xA800);//取地址0x05
// TIMP5 = SPI_ReadWrite_DRV8323(0xB000);//取地址0x06
TIMP01 = SPI_ReadWrite_DRV8323(0x1000); //address 02
TIMP02 = SPI_ReadWrite_DRV8323(0x1bff); //address 03
TIMP03 = SPI_ReadWrite_DRV8323(0x27ff); //address 04
TIMP04 = SPI_ReadWrite_DRV8323(0x2a59); //address 05
TIMP05 = SPI_ReadWrite_DRV8323(0x3283); //address 06
// SPI_ReadWrite_DRV8323(0x1000); //address 02
// SPI_ReadWrite_DRV8323(0x1B22); //address 03
// SPI_ReadWrite_DRV8323(0x2722); //address 04
// SPI_ReadWrite_DRV8323(0x2B66); //address 05
// SPI_ReadWrite_DRV8323(0x3280); //address 06
HAL_Delay(500);
TIMP1 = SPI_ReadWrite_DRV8323(0x9000);//取地址0x02
TIMP2 = SPI_ReadWrite_DRV8323(0x9800);//取地址0x03
TIMP3 = SPI_ReadWrite_DRV8323(0xA000);//取地址0x04
TIMP4 = SPI_ReadWrite_DRV8323(0xA800);//取地址0x05
TIMP5 = SPI_ReadWrite_DRV8323(0xB000);//取地址0x06
printf("add0x02 = %d \r\n", TIMP1);
printf("add0x03 = %d \r\n", TIMP2);
printf("add0x04 = %d \r\n", TIMP3);
printf("add0x05 = %d \r\n", TIMP4);
printf("add0x06 = %d \r\n", TIMP5);
Drv8323_DISABLE();//使能Drv-Enable输入低电平,驱动芯片停止工作
/* //寄存器版本测试代码
Drv8323_ENABLE();//使能Drv-Enable输入高电平,驱动芯片开始工作
HAL_Delay(1000);
// TIMP01 = SPI_WRITE_DRV8323(0x1000); //address 02
// TIMP02 = SPI_WRITE_DRV8323(0x1bff); //address 03
// TIMP03 = SPI_WRITE_DRV8323(0x27ff); //address 04
// TIMP04 = SPI_WRITE_DRV8323(0x2a59); //address 05
// TIMP05 = SPI_WRITE_DRV8323(0x3283); //address 06
// HAL_Delay(500);
TIMP1 = SPI_Read_DRV8323(0x9000);//取地址0x02
TIMP2 = SPI_Read_DRV8323(0x9800);//取地址0x03
TIMP3 = SPI_Read_DRV8323(0xA000);//取地址0x04
TIMP4 = SPI_Read_DRV8323(0xA800);//取地址0x05
TIMP5 = SPI_Read_DRV8323(0xB000);//取地址0x06
printf("add0x02 = %d \r\n", TIMP1);
printf("add0x03 = %d \r\n", TIMP2);
printf("add0x04 = %d \r\n", TIMP3);
printf("add0x05 = %d \r\n", TIMP4);
printf("add0x06 = %d \r\n", TIMP5);
Drv8323_DISABLE();//使能Drv-Enable输入低电平,驱动芯片停止工作
*/
}
/**
* @brief 【MOTOR-DRV8323 芯片使能】
* @function 1 - DRV8323的芯片使能
* @function 2 - DRV8323的芯片关闭
*/
// 1 - DRV8323的芯片使能
void Drv8323_ENABLE(void) //DRV8323 Enable
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_SET);
//printf("DRV8323S 芯片启用。\r\n");
}
// 2 - DRV8323的芯片关闭
void Drv8323_DISABLE(void) //DRV8323 Disable
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_RESET);
//printf("DRV8323S 芯片关闭。\r\n");
}
【motor_drv8323.c】代码(HAL库函数的简洁版本,可直接用)👇
/**
******************************************************************************
* @file motor_drv8323.c
* @date 2023-05-08
* @brief 驱动芯片DRV8323相关 - STM32 F407
******************************************************************************
*/
#include "motor_drv8323.h"
uint16_t TIMP01, TIMP02, TIMP03, TIMP04, TIMP05;
uint16_t TIMP1, TIMP2, TIMP3, TIMP4, TIMP5;
/**
* @brief 【MOTOR-DRV8323 SPI通信】
* 配置 DRV8323工作状态
* @function 1 - SPI读&写一体化函数 16位 - HAL库函数版本
* @function 2 - SPI功能异常提示函数
* @function 3 - 用SPI配置DRV8323的函数 (操作封装)
*/
// 1 - SPI读&写一体化函数 16位 - HAL库函数版本
uint16_t SPI_ReadWrite_DRV8323(uint16_t ReadAddr)
{
uint16_t value;
SPI3_nSCS_LOW(); // SPI3-nSCS 拉低使能 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时(大概500),否则速度太快可能会出错!
HAL_SPI_TransmitReceive(&hspi3, (uint8_t*)&ReadAddr, (uint8_t*)&value, 1, 1000); // 通过一个强制转换“骗过”库函数接口
HAL_Delay(100); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时(大概500),否则速度太快可能会出错!
SPI3_nSCS_HIGH(); // SPI3-nSCS 拉高关断 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_SET);
HAL_Delay(500);
return value;
}
// 2 - SPI功能异常提示函数
void SPI_ERROR_UserCallback(void)
{
/* 等待超时后的处理,输出错误信息 */
printf("SPI 通信异常! \r\n");
}
// 3 - 用SPI设置DRV8323的函数 (操作封装)
void Set_DRV8323(void)
{
Drv8323_ENABLE();//使能Drv-Enable输入高电平,驱动芯片开始工作
HAL_Delay(1000);
TIMP01 = SPI_ReadWrite_DRV8323(0x1000); //address 02
TIMP02 = SPI_ReadWrite_DRV8323(0x1bff); //address 03
TIMP03 = SPI_ReadWrite_DRV8323(0x27ff); //address 04
TIMP04 = SPI_ReadWrite_DRV8323(0x2a59); //address 05
TIMP05 = SPI_ReadWrite_DRV8323(0x3283); //address 06
HAL_Delay(200);
TIMP1 = SPI_ReadWrite_DRV8323(0x9000);//取地址0x02
TIMP2 = SPI_ReadWrite_DRV8323(0x9800);//取地址0x03
TIMP3 = SPI_ReadWrite_DRV8323(0xA000);//取地址0x04
TIMP4 = SPI_ReadWrite_DRV8323(0xA800);//取地址0x05
TIMP5 = SPI_ReadWrite_DRV8323(0xB000);//取地址0x06
printf("======DRV8323寄存器配置情况======\r\n");
printf("add0x02 = %x \r\n", TIMP1); // %d - 十进制
printf("add0x03 = %x \r\n", TIMP2); // %x - 十六进制
printf("add0x04 = %x \r\n", TIMP3);
printf("add0x05 = %x \r\n", TIMP4);
printf("add0x06 = %x \r\n", TIMP5);
printf("=================================\r\n");
//Drv8323_DISABLE();//使能Drv-Enable输入低电平,驱动芯片停止工作
//在这里就关的话就用不了啦!
}
/**
* @brief 【MOTOR-DRV8323 芯片使能】
* @function 1 - DRV8323的芯片使能
* @function 2 - DRV8323的芯片关闭
*/
// 1 - DRV8323的芯片使能
void Drv8323_ENABLE(void) //DRV8323 Enable
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_SET);
printf("DRV8323S 芯片启用。\r\n");
}
// 2 - DRV8323的芯片关闭
void Drv8323_DISABLE(void) //DRV8323 Disable
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_RESET);
printf("DRV8323S 芯片关闭。\r\n");
}
【motor_drv8323.h】代码👇
#ifndef __MOTOR_DRV8323_H
#define __MOTOR_DRV8323_H
#include "stm32f4xx.h"
#include "spi.h"
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
/********** MOTOR_CONTROL 宏定义 **********/
#define Dummy_Byte 0xFFFF
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000) // 等待超时时间
#define SPI3_CLK_ENABLE() __HAL_RCC_SPI3_CLK_ENABLE()
//SCK 引脚
#define SPI3_SCK_PIN GPIO_PIN_10
#define SPI3_SCK_ GPIO_PORT GPIOC
//MISO 引脚
#define SPI3_MISO_PIN GPIO_PIN_11
#define SPI3_MISO_GPIO_PORT GPIOC
//MOSI 引脚
#define SPI3_MOSI_PIN GPIO_PIN_12
#define SPI3_MOSI_GPIO_PORT GPIOC
//CS(nSCS) 引脚
#define SPI3_nSCS_PIN GPIO_PIN_1
#define SPI3_nSCS_GPIO_PORT GPIOD
// 以下是两种方法给SPI3_nSCS 高、低电平 ??据说操作寄存器比调用HAL库函数快
// 寄存器版本 给SPI3_nSCS 高、低电平,用寄存器版本可能需要多一点点延时,以免软件速度太快硬件跟不上。
BSRR寄存器:控制管脚的高、低电平。32位有效,低16位写1 高电平,高16位写1 低电平。
//#define digitalLow(p,i) {p->BSRR=(uint32_t)i << 16;} //输出低电平
//#define digitalHigh(p,i) {p->BSRR=i;} //设置为高电平
//#define SPI3_nSCS_LOW() digitalLow( SPI3_nSCS_GPIO_PORT, SPI3_nSCS_PIN )
//#define SPI3_nSCS_HIGH() digitalHigh(SPI3_nSCS_GPIO_PORT, SPI3_nSCS_PIN )
// 库函数版本 给SPI3_nSCS 高、低电平
#define SPI3_nSCS_LOW() HAL_GPIO_WritePin(SPI3_nSCS_GPIO_PORT, SPI3_nSCS_PIN, GPIO_PIN_RESET)
#define SPI3_nSCS_HIGH() HAL_GPIO_WritePin(SPI3_nSCS_GPIO_PORT, SPI3_nSCS_PIN, GPIO_PIN_SET)
/********************************************/
/********** MOTOR_CONTROL 相关变量 **********/
extern SPI_HandleTypeDef hspi3;
/********************************************/
/********** MOTOR_CONTROL 函数声明 **********/
// 【MOTOR-DRV8323 SPI通信】
uint16_t SPI_ReadWrite_DRV8323(uint16_t ReadAddr);// 0 - SPI读&写一体化函数 16位 - HAL库函数版本
uint16_t SPI_ReadWrite16bit(uint16_t ReadAddr);// 1 - SPI 读 & 写16bit函数 - 寄存器版本
uint16_t SPI_WRITE_DRV8323(uint16_t WriteData);// 2 - DRV8323写入函数 16位 - 寄存器版本
uint16_t SPI_Read_DRV8323(uint16_t ReadAddr); // 3 - DRV8323读取函数 16位 - 寄存器版本
void SPI_ERROR_UserCallback(void); // 4 - SPI功能异常提示函数
void Set_DRV8323(void); // 5 - 用SPI配置DRV8323的函数 (操作封装)
// 【MOTOR-DRV8323 芯片使能】
void Drv8323_ENABLE(void);
void Drv8323_DISABLE(void);
/********************************************/
/* USER CODE BEGIN Private defines */
#endif /* __MOTOR_DRV8323_H */
【main.c】代码👇文章来源:https://www.toymoban.com/news/detail-718944.html
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "LED/led.h"
#include "KEY/key.h"
#include "MOTOR/motor_tim.h"
#include "MOTOR/motor_control.h"
#include "MOTOR/motor_drv8323.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM4_Init();
MX_SPI3_Init();
MX_UART4_Init();
MX_USART2_UART_Init();
MX_USART3_UART_Init();
MX_TIM6_Init();
MX_TIM8_Init();
/* USER CODE BEGIN 2 */
Init_Motor(); // MX_TIMx_Init();也在里面
Init_LED();
Set_Motor_StartStop(0); //关闭电机 - stop PWM & Hall
Set_DRV8323(); // 通过SPI配置DRV8323寄存器,来配置驱动芯片工作模式
Set_Motor_StartStop(1); //开启电机 - enable PWM & Hall
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
😶🌫️说在最后
本文关于SPI通信的介绍到这里就结束啦,预祝大家调试顺利!
附上笔者学习过程中觉得对自己有帮助的博文:
🎫STM32G4系列通过SPI配置DRV8353S驱动芯片_超级馒头神的博客-CSDN博客(驱动芯片区别应该仅在于芯片的驱动电压范围不同);
🎫DRV8301的使用_【ql君】qlexcel的博客-CSDN博客;
🎫STM32F334 SPI编程里的坑_hy_wujun-CSDN博客;
🎫【STM32】HAL库开发教程(七)—SPI使用_怪怪王-CSDN博客
🎫关于STM32使用SPI接口实现自通信的一个详细示例(程序实现)_曾小庆-知乎
🎫stm32 GPIO模拟SPI接口实现双机通信_惆怅客~-CSDN博客
🎫DRV8301 SPI调试问题(接收一直为0x0000)_映月寒-CSDN博客
🎫DRV8323S关于SPI通信以及PWM输出不正常-TI官网论坛;
🎫DRV8323 PWM OUTPUT-TI官网论坛;
🎫[FAQ] SPI Configuration and Use-TI官网论坛;
🎫【正点原子-STM32F1开发指南(精英板-HAL库版)-CH28】
🎫【野火-STM32 HAL库开发实战指南——基于野火F4系列开发板-CH23】 比ZDYZ的这个部分讲解得更清晰,更推荐一点点。文章来源地址https://www.toymoban.com/news/detail-718944.html
到了这里,关于【STM32】BLDC驱动&控制开发笔记 | 07_SPI通信测试 - STM32F407用SPI配置DRV8323驱动芯片的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!