1)实验平台:正点原子stm32f103战舰开发板V4
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html##
第四十三章 SPI实验
本章将介绍使用APM32F407驱动板载的NOR Flash进行读写操作。通过本章的学习,读者将学习到使用SPI驱动NOR Flash的使用。
本章分为如下几个小节:
43.1 硬件设计
43.2 程序设计
43.3 下载验证
43.1 硬件设计
43.1.1 例程功能
- 按下KEY_UP和KEY0按键,分别对25Q128进行数据的写入和读取操作,读取到的数据会显示至LCD
- 可通过USMART对25Q128进行读ID和芯片/扇区擦除的操作
- LED0闪烁,指示程序正在运行
43.1.2 硬件资源 - LED
LED0 - PF9 - 按键
KEY0 - PE4
KEY_UP - PA0 - USART1(PA9、PA10连接至板载USB转串口芯片上)
- 正点原子 2.8/3.5/4.3/7/10寸TFTLCD模块(仅限MCU屏,16位8080并口驱动)
- SPI1
SPI1_SCK - PB3
SPI1_MISO - PB4
SPI1_MOSI - PB5 - 25Q128
F_CS - PB14
43.1.3 原理图
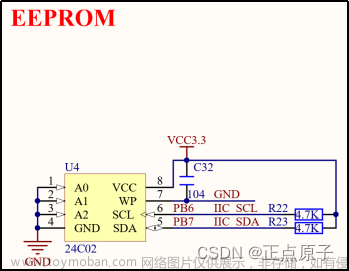
本章实验使用了板载的25Q128芯片,该芯片是一个NOR Flash,MCU是通过SPI与该NOR Flash进行连接与通信的,该NOR Flash与MCU的连接原理图,如下如图所示:
图43.1.3.1 NOR Flash与MCU的连接原理图
43.2 程序设计
43.2.1 Geehy标准库的SPI驱动
本章实验通过SPI1驱动NOR Flash,因此需要对SPI1进行相应的配置,并使用SPI1与NOR Flash进行通信,其具体的步骤如下所示:
①:配置SPI1
②:使能SPI1
③:使用SPI1发送数据(接收数据)前,等待SPI1发送缓冲区为空(接收缓冲区非空)
④:使用SPI1发送一字节数据
⑤:使用SPI1接收一字节数据
在Geehy标准库中对应的驱动函数如下:
①:配置SPI
该函数用于配置SPI,其函数原型如下所示:
void SPI_Config(SPI_T* spi, SPI_Config_T* spiConfig);
该函数的形参描述,如下表所示:
形参 描述
spi 指向SPI外设结构体的指针
例如:SPI1、SPI2等(在apm32f4xx.h文件中有定义)
spiConfig 指向SPI配置结构体的指针
需自行定义,并根据SPI的配置参数填充结构体中的成员变量
表43.2.1.1 函数SPI_Config()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表43.2.1.2 函数SPI_Config()返回值描述
该函数使用SPI_Config_T类型的结构体变量传入SPI的配置参数,该结构体的定义如下所示:
typedef enum
{
SPI_MODE_SLAVE, /* 从机模式 */
SPI_MODE_MASTER /* 主机模式 */
} SPI_MODE_T;
typedef enum
{
SPI_DATA_LENGTH_8B, /* 8位数据格式 */
SPI_DATA_LENGTH_16B /*16位数据格式 */
} SPI_DATA_LENGTH_T;
typedef enum
{
SPI_CLKPHA_1EDGE, /* 在第一个时钟边沿进行采样 */
SPI_CLKPHA_2EDGE /* 在第二个时钟边沿进行采样 */
} SPI_CLKPHA_T;
typedef enum
{
SPI_CLKPOL_LOW, /* 时钟信号空闲时为低电平 */
SPI_CLKPOL_HIGH /* 时钟信号空闲时为高电平 */
} SPI_CLKPOL_T;
typedef enum
{
SPI_NSS_HARD, /* 硬件片选 */
SPI_NSS_SOFT /* 软件片选 */
} SPI_NSS_T;
typedef enum
{
SPI_FIRSTBIT_MSB, /* MSB */
SPI_FIRSTBIT_LSB /* LSB */
} SPI_FIRSTBIT_T;
typedef enum
{
SPI_DIRECTION_2LINES_FULLDUPLEX = 0x0000, /* 双线全双工 */
SPI_DIRECTION_2LINES_RXONLY = 0x0100, /* 双线仅接收 */
SPI_DIRECTION_1LINE_RX = 0x0001, /* 单线仅接受 */
SPI_DIRECTION_1LINE_TX = 0x0011 /* 单线仅发送 */
} SPI_DIRECTION_T;
typedef enum
{
SPI_BAUDRATE_DIV_2, /*波特率2分频 */
SPI_BAUDRATE_DIV_4, /*波特率4分频 */
SPI_BAUDRATE_DIV_8, /*波特率8分频 */
SPI_BAUDRATE_DIV_16, /*波特率16分频 */
SPI_BAUDRATE_DIV_32, /*波特率32分频 */
SPI_BAUDRATE_DIV_64, /*波特率64分频 */
SPI_BAUDRATE_DIV_128, /*波特率128分频 */
SPI_BAUDRATE_DIV_256, /*波特率256分频 */
} SPI_BAUDRATE_DIV_T;
typedef struct
{
SPI_MODE_T mode; /* 模式 */
SPI_DATA_LENGTH_T length; /* 数据位长度 */
SPI_CLKPHA_T phase; /* 采样阶段 */
SPI_CLKPOL_T polarity; /* 时钟线空闲极性 */
SPI_NSS_T nss; /* 片选信号 */
SPI_FIRSTBIT_T firstBit; /* 数据第一比特 */
SPI_DIRECTION_T direction; /* 方向 */
SPI_BAUDRATE_DIV_T baudrateDiv; /* 波特率分频 */
uint16_t crcPolynomial; /* CRC校验值 */
} SPI_Config_T;
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_spi.h"
void example_fun(void)
{
SPI_Config_T spi_init_struct;
/* 配置SPI1 */
spi_init_struct.mode = SPI_MODE_MASTER;
spi_init_struct.length = SPI_DATA_LENGTH_8B;
spi_init_struct.phase = SPI_CLKPHA_2EDGE;
spi_init_struct.polarity = SPI_CLKPOL_HIGH;
spi_init_struct.nss = SPI_NSS_SOFT;
spi_init_struct.firstBit = SPI_FIRSTBIT_MSB;
spi_init_struct.direction = SPI_DIRECTION_2LINES_FULLDUPLEX;
spi_init_struct.baudrateDiv = SPI_BAUDRATE_DIV_256;
spi_init_struct.crcPolynomial = 7;
SPI_Config(SPI1_SPI, &spi_init_struct);
}
②:使能SPI
该函数用于使能SPI,其函数原型如下所示:
void SPI_Enable(SPI_T* spi);
该函数的形参描述,如下表所示:
形参 描述
spi 指向SPI外设结构体的指针
例如:SPI1、SPI2等(在apm32f4xx.h文件中有定义)
表43.2.1.3 函数SPI_Enable()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表43.2.1.4 函数SPI_Enable()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_spi.h"
void example_fun(void)
{
/* 使能SPI1 */
SPI_Enable(SPI1);
}
③:读取SPI的状态标志
该函数用于读取SPI的状态标志,其函数原型如下所示:
uint8_t SPI_I2S_ReadStatusFlag(SPI_T* spi, SPI_FLAG_T flag);
该函数的形参描述,如下表所示:
形参 描述
spi 指向SPI外设结构体的指针
例如:SPI1、SPI2等(在apm32f4xx.h文件中有定义)
flag 指定的SPI状态标志
例如:SPI_FLAG_RXBNE、SPI_FLAG_TXBE等(在apm32f4xx_spi.h文件中有定义)
表43.2.1.5 函数SPI_I2S_ReadStatusFlag()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
SET 事件标志发生
RESET 事件标志未发生
表43.2.1.6 函数SPI_I2S_ReadStatusFlag()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_spi.h"
void example_fun(void)
{
uint8_t flag;
/* 读取SPI1的接收缓冲区非空标志 */
flag = SPI_I2S_ReadStatusFlag(SPI1, SPI_FLAG_RXBNE);
if (flag == SET)
{
/* Do something. */
}
else
{
/* Do something. */
}
}
④:SPI发送数据
该函数用于使用SPI发送数据,其函数原型如下所示:
void SPI_I2S_TxData(SPI_T* spi, uint16_t data);
该函数的形参描述,如下表所示:
形参 描述
spi 指向SPI外设结构体的指针
例如:SPI1、SPI2等(在apm32f4xx.h文件中有定义)
data 待发送的数据
表43.2.1.7 函数SPI_I2S_TxData()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表43.2.1.8 函数SPI_I2S_TxData()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_spi.h"
void example_fun(void)
{
uint8_t data;
data = 0x55;
/* 使用SPI1发送1字节数据 */
SPI_I2S_TxData(SPI1, (uint16_t)data);
}
⑤:SPI接收数据
该函数用于接收SPI接收的数据,其函数原型如下所示:
uint16_t SPI_I2S_RxData(SPI_T* spi);
该函数的形参描述,如下表所示:
形参 描述
spi 指向SPI外设结构体的指针
例如:SPI1、SPI2等(在apm32f4xx.h文件中有定义)
表43.2.1.9 函数SPI_I2S_RxData()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
uint16_t类型数据 SPI接收的数据
表43.2.1.10 函数SPI_I2S_TxData()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_spi.h"
void example_fun(void)
{
uint8_t data;
/* 接收SPI1接收到的1字节数据 */
data = (uint8_t)SPI_I2S_RxData(SPI1);
/* Do something. */
}
43.2.2 SPI驱动
本章实验的SPI驱动主要负责向NOR Flash驱动提供SPI的各种操作函数,例如:SPI初始化、SPI读写等。本章实验中,SPI的驱动代码包括spi.c和spi.h两个文件。
SPI驱动中,对SPI、GPIO相关的宏定义,如下所示:
#define SPI1_SPI SPI1
#define SPI1_SPI_CLK_ENABLE() \
do { \
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_SPI1); \
} while (0)
#define SPI1_SCK_GPIO_PORT GPIOB
#define SPI1_SCK_GPIO_PIN GPIO_PIN_3
#define SPI1_SCK_GPIO_PIN_SOURCE GPIO_PIN_SOURCE_3
#define SPI1_SCK_GPIO_AF GPIO_AF_SPI1
#define SPI1_SCK_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOB); \
} while (0)
#define SPI1_MISO_GPIO_PORT GPIOB
#define SPI1_MISO_GPIO_PIN GPIO_PIN_4
#define SPI1_MISO_GPIO_PIN_SOURCE GPIO_PIN_SOURCE_4
#define SPI1_MISO_GPIO_AF GPIO_AF_SPI1
#define SPI1_MISO_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOB); \
} while (0)
#define SPI1_MOSI_GPIO_PORT GPIOB
#define SPI1_MOSI_GPIO_PIN GPIO_PIN_5
#define SPI1_MOSI_GPIO_PIN_SOURCE GPIO_PIN_SOURCE_5
#define SPI1_MOSI_GPIO_AF GPIO_AF_SPI1
#define SPI1_MOSI_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOB); \
} while (0)
SPI驱动中,SPI的初始化函数,如下所示:
/**
* @brief 初始化SPI1
* @param 无
* @retval 无
*/
void spi1_init(void)
{
GPIO_Config_T gpio_init_struct;
SPI_Config_T spi_init_struct;
/* 使能时钟 */
SPI1_SPI_CLK_ENABLE(); /* 使能SPI1时钟 */
SPI1_SCK_GPIO_CLK_ENABLE(); /* 使能SPI1 SCK引脚端口时钟 */
SPI1_MISO_GPIO_CLK_ENABLE(); /* 使能SPI1 MISO引脚端口时钟 */
SPI1_MOSI_GPIO_CLK_ENABLE(); /* 使能SPI1 MOSI引脚端口时钟 */
/* 配置SPI1 SCK引脚 */
GPIO_ConfigPinAF( SPI1_SCK_GPIO_PORT, /* 配置SPI1 SCK引脚复用功能 */
SPI1_SCK_GPIO_PIN_SOURCE,
SPI1_SCK_GPIO_AF);
gpio_init_struct.pin = SPI1_SCK_GPIO_PIN; /* SPI1 SCK引脚 */
gpio_init_struct.mode = GPIO_MODE_AF; /* 复用功能模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_NOPULL; /* 禁止上拉/下拉 */
GPIO_Config(SPI1_SCK_GPIO_PORT, &gpio_init_struct); /* 配置SPI1 SCK引脚 */
/* 配置SPI1 MISO引脚 */
GPIO_ConfigPinAF( SPI1_MISO_GPIO_PORT, /* 配置SPI1 MISO引脚复用功能 */
SPI1_MISO_GPIO_PIN_SOURCE,
SPI1_MISO_GPIO_AF);
gpio_init_struct.pin = SPI1_MISO_GPIO_PIN; /* SPI1 MISO引脚 */
gpio_init_struct.mode = GPIO_MODE_AF; /* 复用功能模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_NOPULL; /* 禁止上拉/下拉 */
GPIO_Config(SPI1_MISO_GPIO_PORT, &gpio_init_struct); /* 配置SPI1 MISO引脚 */
/* 配置SPI1 MOSI引脚 */
GPIO_ConfigPinAF( SPI1_MOSI_GPIO_PORT, /* 配置SPI1 MOSI引脚复用功能 */
SPI1_MOSI_GPIO_PIN_SOURCE,
SPI1_MOSI_GPIO_AF);
gpio_init_struct.pin = SPI1_MOSI_GPIO_PIN; /* SPI1 MOSI引脚 */
gpio_init_struct.mode = GPIO_MODE_AF; /* 复用功能模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_NOPULL; /* 禁止上拉/下拉 */
GPIO_Config(SPI1_MOSI_GPIO_PORT, &gpio_init_struct); /* 配置SPI1 MOSI引脚 */
/* 配置SPI1 */
spi_init_struct.mode = SPI_MODE_MASTER;
spi_init_struct.length = SPI_DATA_LENGTH_8B;
spi_init_struct.phase = SPI_CLKPHA_2EDGE;
spi_init_struct.polarity = SPI_CLKPOL_HIGH;
spi_init_struct.nss = SPI_NSS_SOFT;
spi_init_struct.firstBit = SPI_FIRSTBIT_MSB;
spi_init_struct.direction = SPI_DIRECTION_2LINES_FULLDUPLEX;
spi_init_struct.baudrateDiv = SPI_BAUDRATE_DIV_256;
spi_init_struct.crcPolynomial = 7;
SPI_Config(SPI1_SPI, &spi_init_struct); /* 配置SPI1 */
SPI_Enable(SPI1_SPI); /* 使能SPI1 */
}
可以看到,该函数会配置并使能SPI1,同时也配置SPI使用的GPIO引脚的复用功能。
SPI驱动中,使用SPI传输1字节数据的函数,如下所示:
/**
* @brief SPI1读写一个字节数据
* @param txdata: 待发送的一字节数据
* @retval 接收到的一字节数据
*/
uint8_t spi1_read_write_byte(uint8_t txdata)
{
uint8_t rxdata;
/* 等待发送缓冲器为空 */
while (SPI_I2S_ReadStatusFlag(SPI1_SPI, SPI_FLAG_TXBE) != SET);
/* 发送一字节数据 */
SPI_I2S_TxData(SPI1_SPI, txdata);
/* 等待接收缓冲非空 */
while (SPI_I2S_ReadStatusFlag(SPI1_SPI, SPI_FLAG_RXBNE) != SET);
/* 接收一字节数据 */
rxdata = SPI_I2S_RxData(SPI1_SPI);
return rxdata;
}
使用SPI传输1字节数据就是先后发送并接收1字节数据。
43.2.3 NOR Flash驱动
本章实验的NOR Flash驱动主要负责向应用层提供NOR Flash的初始化和读写操作等函数。本章实验中,NOR Flash的驱动代码包括norflash.c和norflash.h两个文件。
NOR Flash驱动中,对GPIO的相关宏定义,如下所示:
#define NORFLASH_CS_GPIO_PORT GPIOB
#define NORFLASH_CS_GPIO_PIN GPIO_PIN_14
#define NORFLASH_CS_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOB); \
} while (0)
#define NORFLASH_CS(x) do { x ? \
GPIO_SetBit(NORFLASH_CS_GPIO_PORT, NORFLASH_CS_GPIO_PIN) : \
GPIO_ResetBit(NORFLASH_CS_GPIO_PORT, NORFLASH_CS_GPIO_PIN); \
} while (0)
NOR Flash驱动中,初始化NOR Flash的函数,如下所示:
/**
* @brief 初始化NOR Flash
* @param 无
* @retval 无
*/
void norflash_init(void)
{
GPIO_Config_T gpio_init_struct;
uint8_t temp;
/* 使能时钟 */
NORFLASH_CS_GPIO_CLK_ENABLE(); /* 使能NOR Flash片选引脚端口时钟 */
/* 配置NOR Flash片选引脚 */
gpio_init_struct.pin = NORFLASH_CS_GPIO_PIN; /* NOR Flash片选引脚 */
gpio_init_struct.mode = GPIO_MODE_OUT; /* 通用输出模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_UP; /* 上拉 */
GPIO_Config(NORFLASH_CS_GPIO_PORT, &gpio_init_struct);
NORFLASH_CS(1); /* 失能NOR Flash片选 */
/* 配置SPI1接口 */
spi1_init(); /* 初始化SPI1 */
spi1_set_speed(SPI_SPEED_4); /* 设置SPI1速度,84MHz/4=21MHz */
g_norflash_type = norflash_read_id();/* 读取NOR Flash芯片ID */
if (g_norflash_type == W25Q256) /* W25Q256需使能4字节地址模式 */
{
temp = norflash_read_sr(3); /* 读状态寄存器3,判断地址模式 */
if ((temp & 0x01) == 0) /* 如果不是4字节地址模式,则需进行相应配置 */
{
norflash_write_enable(); /* NOR Flash写使能 */
temp |= (1 << 1); /* ADP=1,配置上电4字节地址模式 */
norflash_write_sr(3, temp); /* 写状态寄存器3 */
NORFLASH_CS(0); /* 使能NOR Flash片选 */
spi1_read_write_byte(NORFLASH_Enable4ByteAddr);/* 使能4字节地址模式 */
NORFLASH_CS(1); /* 失能NOR Flash片选 */
}
}
}
可以看到,在NOR Flash的初始化函数中,先初始化了控制NOR Flash片选的GPIO引脚,然后再是初始化与NOR Flash通讯的SPI并配置其通讯波特率,最后还会根据不同容量的NOR Flash做相应的配置操作。
NOR Flash驱动中其他对NOR Flash的操作函数,例如,NOR Flash的读写函数、擦除函数等,请读者结合25Q128 NOR Flash芯片的数据手册查看本实验的配套实验源码。
43.2.4 实验应用代码
本章实验的应用代码,如下所示:文章来源:https://www.toymoban.com/news/detail-719295.html
/* 待写入NOR Flash的数据 */
static const uint8_t g_text_buf[] = {"APM32 SPI TEST"};
/* 待写入NOR Flash数据的长度 */
#define TEXT_SIZE sizeof(g_text_buf)
int main(void)
{
uint16_t id;
uint8_t t = 0;
uint8_t key;
uint8_t data[TEXT_SIZE];
uint32_t flashsize;
NVIC_ConfigPriorityGroup(NVIC_PRIORITY_GROUP_3); /* 设置中断优先级分组为组3 */
sys_apm32_clock_init(336, 8, 2, 7); /* 配置系统时钟 */
delay_init(168); /* 初始化延时功能 */
usart_init(115200); /* 初始化串口 */
usmart_dev.init(84); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
norflash_init(); /* 初始化NOR Flash */
lcd_show_string(30, 50, 200, 16, 16, "APM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "SPI TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, "KEY_UP:Write KEY0:Read", RED);
id = norflash_read_id(); /* 读NOR Flash芯片ID */
while ((id == 0) || (id == 0xFFFF)) /* 检测不到NOR Flash芯片 */
{
lcd_show_string(30, 130, 200, 16, 16, "NOR Flash Check Failed!", RED);
delay_ms(500);
lcd_show_string(30, 130, 200, 16, 16, "Please Check! ", RED);
delay_ms(500);
LED0_TOGGLE();
}
/* NOR Flash检测正常 */
lcd_show_string(30, 130, 200, 16, 16, "NOR FLASH Ready!", BLUE);
flashsize = 16 * 1024 * 1204; /* NOR Flash容量为16MB */
while (1)
{
t++;
key = key_scan(0);
if (key == WKUP_PRES) /* 写入数据 */
{
lcd_fill(0, 150, 239, 319, WHITE);
lcd_show_string(30, 150, 200, 16, 16, "Start Write Flash....", BLUE);
sprintf((char *)data, "%s%d", (char *)g_text_buf, t);
/* 从倒数第100个地址处开始写入TEXT_SIZE个字节的数据 */
norflash_write((uint8_t *)data, flashsize - 100, TEXT_SIZE);
lcd_show_string(30, 150, 200, 16, 16, "Flash Write Finished!", BLUE);
}
else if (key == KEY0_PRES) /* 读取数据 */
{
lcd_show_string(30, 150, 200, 16, 16, "Start Read FLASH... . ",BLUE);
/* 从倒数第100个地址处开始读出TEXT_SIZE个字节的数据 */
norflash_read(data, flashsize - 100, TEXT_SIZE);
lcd_show_string(30, 150, 200, 16, 16, "The Data Readed Is: ",BLUE);
lcd_show_string(30, 170, 200, 16, 16, (char *)data, BLUE);
}
if (t == 20)
{
LED0_TOGGLE();
t = 0;
}
delay_ms(10);
}
}
从本章实验的应用代码中可以看到,在初始化完NOR Flash后,会检测与NOR Flash的连接是否正常,若与NOR Flash的连接正常,则会不断地等待按键输入,若检测到KEY_UP按键被按下,则会往NOR Flash的指定地址中写入指定的数据,若检测KEY0按键被按下,则会从NOR Flash的指定地址中读取数据,并在LCD上进行显示。
43.3 下载验证
在完成编译和烧录操作后,若MCU与NOR Flash的连接无误,则可以在LCD上看到“NOR Flash Ready!”的提示信息,此时可以按下KEY_UP按键往NOR Flash的指定地址写入指定的数据,然后再按下KEY_0按键从NOR Flash的指定地址将写入的数据读回来在LCD上进行显示,此时便可以看到LCD上显示“APM32 SPI TESTn”的提示信息,该提示信息就是从NOR Flash中读回的数据。文章来源地址https://www.toymoban.com/news/detail-719295.html
到了这里,关于【正点原子STM32连载】 第四十三章 SPI实验 摘自【正点原子】APM32F407最小系统板使用指南的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!