STM32通过串口控制LED闪烁或者呼吸效果
目录
-
- STM32通过串口控制LED闪烁或者呼吸效果
- 1、准备工作
- 2、思路分析
- 3、实际操作
- 4、小结
1、准备工作
1.首先我们需要准备32的最小系统板或者开发板。
2.准备一个LED灯(如果使用板子上的灯来实现则不需要,下面我是使用最小系统板上的LED灯来实现)。
3.若干杜邦线。
4.软件方面的准备,我是直接使用开源PWM源码进行修改。
2、思路分析
一、使用串口调试助手向单片机发送数据(这个数据可以是一个字符,也可以是字符串,根据个人需求),我们发送的数据被单片机接收到后,会被保存在数据缓冲区USART_RX_BUF这个函数中。
二、我们的数据是存在USART_RX_BUF函数中,只要我们对USART_RX_BUF函数中的数据进行判断就可以让它实现不同的功能,这个判断可以按位操作,也可以使用数组的方式进行判断。
三、主函数中写入我们需要实现的功能函数,主要使用IF判断语句,来进行判断。
下面来看看实际操作。
3、实际操作
1)如果你也是使用开源的PWM模板的话,第一步就可以省略了,第一步主要做一些使能串口和定义串口,定时器等的工作,我这里我使用的是定时器3的通道2——PB5(部分重映射,因为最小系统板的LED灯是对应PC13口的,到时候看效果还要使用一根杜邦线把PB5和PC13连在一起。如果自己准备了LED的小伙伴也可以直接接自己的LED但是最好要接一个保护电阻,还有要与单片机共地哦)这些都是开源模板里面已经帮我们定义好的,我们直接使用就行。如果是想自己写的小伙伴开源参考下面的代码
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3 上面这串代码就是使能了定时器3的通道2 ,和配置了相关的GPIO口。这就完成了第一步。
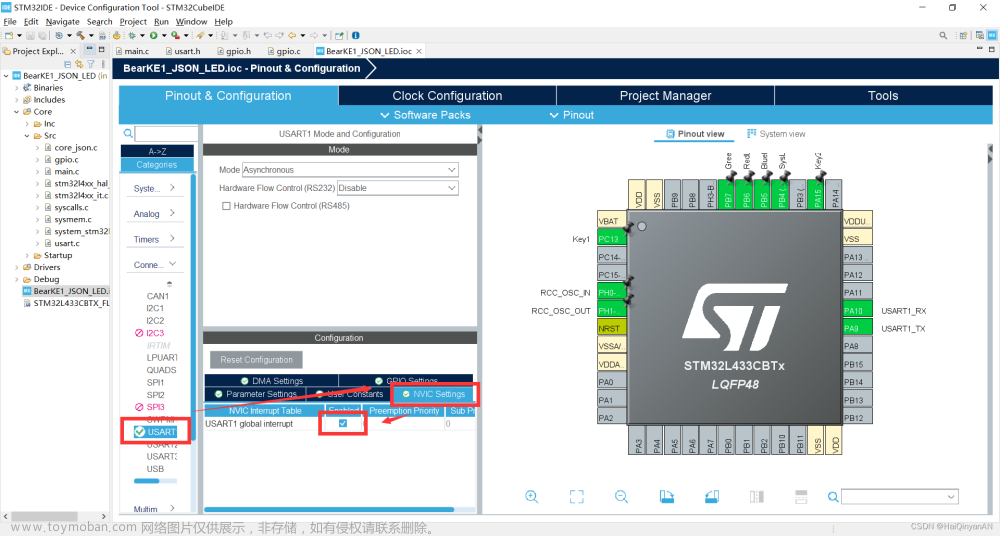
2)使能串口和配置串口,USART1_TX --GPIOA.9(发送);USART1_RX—GPIOA.10(接收),串口1的发生和接收分别对应着PA9和PA10,所以我们要使能和配置这两个口,把PA9配置成输出口,PA10配置成输入口。然后还要使能中断,其实在这个项目中,中断不是必要的 ,但是最好也要搞一下。还要写中断服务函数,根据自己需要写,我这里我只是把它用作了判断数据是否接收成功。如果对应串口这个不是很了解的,也可以看我上一篇文章,是介绍串口和串口中断的。分析到这些就OK了,下面上代码。
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1 上面这些是串口的基本配置,下面是中断服务函数
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
如果想要主函数中比较简洁的话,也可以把判断的代码放到中断服务函数里面来,每次我们从串口发送一个数据过来,如果你写了中断的话,它都会进行中断服务函数中的。
3)这个也是最重要的一步,前两步在源码中都有的,只要你根据你需要改就行。这步我们说如何控制LED的闪烁或者是呼吸的效果。我使用的是一个位一个位的判断,这样子比较的烧芯片,但是我当时想到的是这个办法,后面我又知道可以使用数组进行判断,这个数组函数是C语言中的,感兴趣的小伙伴可以去查查,我这里主要讲烧芯片的办法,首先我先判断串口调试助手发送进来的是不是“huxi”这个数据,如果是我就会令一个变量,这里是t,t=1,这样后面我们就可以直接判断t是否等于1来判断要不要实现呼吸这个效果了,后面需要清除接收标记 USART_RX_STA=0;这样之后串口才能重新接收数据。
if(USART_RX_BUF[0]=='h'&&USART_RX_BUF[1]=='u'&&USART_RX_BUF[2]=='x'
&&USART_RX_BUF[3]=='i')
{
t=1;
USART_RX_STA=0;
// printf("t2.txt=\"呼吸\"\xff\xff\xff");
}if(t==1)
{
delay_ms(10);//去抖动
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>200)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}上面这两个代码就是实现呼吸灯效果的,闪烁效果的做法跟呼吸灯是一样的,也是先进行判断,然后调用判断结果,我这里是判断接收是否等于“shanshuo”这个数据,如果等于t=0,后面调用t这个变量就可以了,话不多说,上代码。
if(t==0)
{
TIM_SetCompare2(TIM3,0);
delay_ms(300);
TIM_SetCompare2(TIM3,899);
delay_ms(300);
}这样使用两次判断就可以把这两个功能都实现了。不过有一个小问题是,我们这样子接收判断是把原来存在数据缓冲区USART_RX_BUF中的数据给覆盖掉的,如果前一个数据的长度比后一个要长,那就会覆盖不完,最好还有加一个清除函数,这里介绍一种办法使用运行库函数memset():memset(str, 0, sizeof(str));这样就可以把缓冲区的数据清除掉,当然还有其他办法,但是我就想到这个,可能不好用。但是我们这个项目里面覆盖完不完并不会影响结果,所以也可以用,不过在需要把数据打印到串口这样的项目中,就很有必要把之前数据给清除掉,不然容易出错。
为了代码的完整,下面我把整个主函数的代码给贴出来,给各位伙伴参考。
int main(void)
{
u16 t;
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
if(USART_RX_BUF[0]=='h'&&USART_RX_BUF[1]=='u'&&USART_RX_BUF[2]=='x'
&&USART_RX_BUF[3]=='i')
{
t=1;
USART_RX_STA=0;
}
else if(USART_RX_BUF[0]=='s'&&USART_RX_BUF[1]=='h'&&USART_RX_BUF[2]=='a'
&&USART_RX_BUF[3]=='n'&&USART_RX_BUF[4]=='s'&&USART_RX_BUF[5]=='h'&&USART_RX_BUF[6]=='u'&&USART_RX_BUF[7]=='o')
{
t=0;
USART_RX_STA=0;
}
if(t==1)
{
delay_ms(10);//去抖动
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>200)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}
if(t==0)
{
TIM_SetCompare2(TIM3,0);
delay_ms(300);
TIM_SetCompare2(TIM3,899);
delay_ms(300);
}
}
}4、小结
1.在这个项目中要注意把PB5和PC13用杜邦线连到一样哦,不然就看不到效果啦。
2.还有一个易错点就是,在闪烁这个功能代码中,很多人首先想到的肯定是让那个GPIO口的电平置高或者置低来控制灯的闪烁,但是这样子的话,你就不可以只用一个灯来实现呼吸和闪烁之间的转换了,你需要使用两个灯,一个呼吸一个闪烁,这样子是比较麻烦的。但是也根据个人需要吧,如果想要只用一个灯实现两个效果,就使用上面的方法,呼吸和闪烁都使用定时器3通道2来控制。这样就可以达到转换自如了。
3.就是数据覆盖的问题,这个也是根据你要做的项目要解决吧,可以清除,也可以不用。
4.上面的办法只是控制呼吸和闪烁的一种办法,或许复杂了,希望有更加简单办法的大佬指导一下,我也是刚刚学习,如有不懂的,可以私信交流,分享到此,谢谢。
学习总结:
首先,我们学习的课本是嵌入式系统应用教程。我学习的体会是这样的:开始时,由于是刚刚入门,对老师书的好多东西是好奇的,好多名词也是新鲜的,不过不太懂什么意思。但是慢慢的,了解的深入让我有了更深的感触和体会。 在嵌入式的学习过程中,让我了解了什么是嵌入式系统。它就是以应用为中心,以计算机技术为基础,软硬件可定制,适用于不同应用场合,对功能、可靠性、成本、体积、功耗有严格要求的计算机系统。他一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统、用户应用程序四个部分组成,用于实现对其他设备的控制、监视或管理功能。嵌入式系统已经应用于科学研究、工业控制、军事技术、交通通信、医疗卫生、消费娱乐等领域,人们日常使用的手机、PDA、汽车、智能家电、GPS等均是嵌入式系统的典型代表。 一开始我们就学习嵌入式的系统的基础部分,那很简单,就是一些定义或是介绍之类的。在进入第二章时,就开始学习了嵌入式开发过程中的主要操作系统——linux,在接下来的课程中,我发现嵌入式的学习过程还是蛮有趣的。在对linux的学习中,我们对它有了一点点的了解,接着就是学习一虚拟机的方式安装linux。对我来说有趣的就是安装的过程了,首先我们跟着老师的脚步走,学会了怎么安装,在自己动手进行对它的安装,这个过程是简单而有趣的。这样的开始让我对它充满了兴趣,也对以后的学习充满了信心。 其次就是安装好了之后,老师就更深一步的教我们应用了。在这是老师首先交给我们的是一些简单的命令应用,Linux具有很丰富的命令,绝大多数命令具有大量的参数。在学习命令的过程中,只要你认真的看着老师操作还有认真听着他讲,你就会发现有些命令的操作还是很简单的,不过在操作的过程中,我也有遇到有些困难,会出现你按照书上学习的例子,将命令输入终端时会出现你不想要的结果,也就是错误的结果。这是问问旁边的同学或是懂的同学就可以解决了。在对于这部分的学习中,让我知道了命令对于嵌入式的重要性。它是linux的重要内容,linux中所有的功能都是通过命令执行。在实际应用中,为了减少系统开销,经常不使用图形界面,此时,对系统的所有操作都需要以命令方式来执行。在嵌入式系统开发过程中,由于目标机的性能和配置比较低,因此,一般情况下目标机仅具有命令窗口而没有图形界面,对目标机的所有操作都通过命令来实现。 还有的那就是进一步学习与嵌入式系统开发相关的linux的服务,他们的启动、设置等的操作和应用。而在学习之中,我们主要介绍的是嵌入式系统中开发工程使用的TFTP、Telent和NFS服务。第一个实现的事上机位与下机位之间文件的传输、无磁盘网络的设备的启动等功能;第二个实现的事远程登录功能;第三个实现的是网络文件系统功能。 从以上的内容之中,并不难感受到我们的学习过程是由浅入深的,这对于我们的学习也有了较好的帮助。 当然,我们学习的不仅仅是这么几个内容,其中还有相关的实验内容。在我们基础的学习的过程之中,我有了这么一点的感受,总的来说就是概念加专业名词还有介绍加实验。不过你绝对不能小看那些概念和介绍,它对我们有着很重要的指导作用哦!实验那就更不用说了,它提高我们的动手能力,在实验的过程中还能让你更加理解书中的理念,这就是我学习嵌入式的感受。文章来源:https://www.toymoban.com/news/detail-721155.html
21物联网应用技术2班---田佩宗文章来源地址https://www.toymoban.com/news/detail-721155.html
到了这里,关于STM32通过串口控制LED闪烁或者呼吸效果的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!