机器人技术的迅猛发展,促使机器人逐渐走进了人们的生活,服务型室内移动机器人更是获得了广泛的关注。但室内机器人的普及还存在许多亟待解决的问题,定位与导航就是其中的关键问题之一。在这类问题的研究中,需要把握三个重点:一是地图精确建模;二是机器人准确定位;三是路径实时规划。在近几十年的研究中,对以上三个重点提出了多种有效的解决方法。
室外定位与导航可以使用GPS,但在室内这个问题就变得比较复杂。为了实现室内的定位定 姿, 一 大 批 技 术 不 断 涌 现, 其 中, SLAM 技 术 逐 渐 脱 颖 而 出。 SLAM(Simultaneous
Localization and Mapping,即时定位与地图构建)最早由Smith、Self和Cheeseman于1988年提出。作为一种基础技术,SLAM从最早的军事用途到今天的扫地机器人,吸引了一大批研究者和爱好者,同时也使这项技术逐步走入普通消费者的视野。
使用ROS实现机器人的SLAM和自主导航等功能是非常方便的,因为有较多现成的功能包可 供 开 发 者 使 用, 如 gmapping、 hector_slam、 cartographer、 rgbdslam、 ORB_SLAM、
move_base、amcl等。本章我们将学习这些功能包的使用方法,并且使用仿真环境和真实机器人实现这些功能。
理论基础
SLAM可以描述为:机器人在未知的环境中从一个未知位置开始移动,移动过程中根据位置估计和地图进行自身定位,同时建造增量式地图,实现机器人的自主定位和导航。
想象一个盲人在一个未知的环境里,如果想感知周围的大概情况,那么他需要伸展双手作为他的“传感器”,不断探索四周是否有障碍物。当然这个“传感器”有量程范围,他还需要不断移动,同时在心中整合已经感知到的信息。当感觉新探索的环境好像是之前遇到过的某个位置,他就会校正心中整合好的地图,同时也会校正自己当前所处的位置。当然,作为一个盲人,感知能力有限,所以他探索的环境信息会存在误差,而且他会根据自己的确定程度为探索到的障碍物设置一个概率值,概率值越大,表示这里有障碍物的可能性越大。一个盲人探索未知环境的场景基本可以表示SLAM算法的主要过程。这里不详细讨论SLAM的算法实现,只对概念做一个基本理解,感兴趣的读者可以查找相关资料进行深度学习。
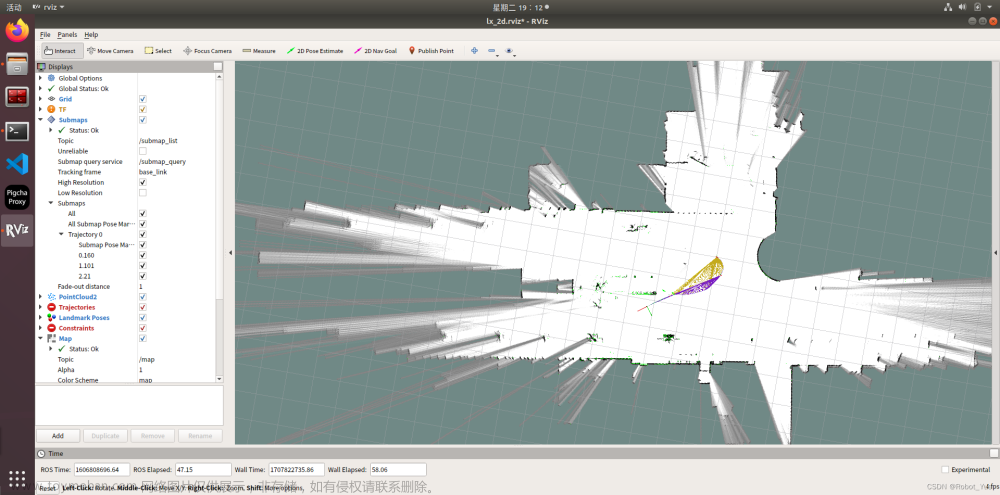
下图所示即为使用SLAM技术建立的室内地图。

家庭、商场、车站等场所是室内机器人的主要应用场景,在这些应用中,用户需要机器人通过移动完成某些任务,这就需要机器人具备自主移动、自主定位的功能,我们把这类应用统称为自主导航。
自主导航往往与SLAM密不可分,因为SLAM生成的地图是机器人自主移动的主要蓝图。这类问题可以总结为:在服务机器人工作空间中,根据机器人自身的定位导航系统找到一条从起始状态到目标状态、可以避开障碍物的最优路径。
要完成机器人的SLAM和自主导航,机器人首先要有感知周围环境的能力,尤其要有感知周围环境深度信息的能力,因为这是探测障碍物的关键数据。用于获取深度信息的传感器主要有以下几种类型。
(1)激光雷达
激光雷达是研究最多、使用最成熟的深度传感器,可以提供机器人本体与环境障碍物之间的距离信息,很多常见的扫地机器人就配有高性价比的激光雷达(见图9-2)。激光雷达的优点
是精度高,响应快,数据量小,可以完成实时SLAM任务;缺点是成本高,一款进口高精度的激光雷达价格在一万元以上。现在很多国内企业专注高性价比的激光雷达,也有不少优秀的产品已经推向市场

(2)摄像头
SLAM所用到的摄像头又可以分为两种:一种是单目摄像头,也就是使用一个摄像头完成SLAM。这种方案的传感器简单,适用性强,但是实现的复杂度较高,而且单目摄像头在静止状态下无法测量距离,只有在运动状态下才能根据三角测量等原理感知距离。另一种就是双目摄像头(见图9-3),相比单目摄像头,这种方案无论是在运动状态下还是在静止状态下,都可以感知距离信息,但是两个摄像头的标定较为复杂,大量的图像数据也会导致运算量较大。

3)RGB-D摄像头
RGB-D摄像头是近年来兴起的一种新型传感器,不仅可以像摄像头一样获取环境的RGB图像信息,也可以通过红外结构光、Time-of-Flight等原理获取每个像素的深度信息。丰富的数据
让RGB-D摄像头不仅可用于SLAM,还可用于图像处理、物体识别等多种应用;更重要的一点是,RGB-D摄像头成本较低,它也是目前室内服务机器人的主流传感器方案。常见的RGB-D摄
像头有Kinect v1/v2、华硕Xtion Pro等(见图9-4)。当然,RGB-D**摄像头也存在诸如测量视野窄、盲区大、噪声大等缺点。**

准备工作
ROS中SLAM和自主导航的相关功能包可以通用于各种移动机器人平台,但是为了达到最佳效果,对机器人的硬件仍然有以下三个要求。
1)导航功能包对差分、轮式机器人的效果好,并且假设机器人可直接使用速度指令进行控制,速度指令的定义如图9-5所示。
- linear:机器人在xyz三轴方向上的线速度,单位是m/s。
- angular:机器人在xyz三轴方向上的角速度,单位是rad/s。

2)导航功能包要求机器人必须安装激光雷达等测距设备,可以获取环境深度信息。
3)导航功能包以正方形和圆形的机器人为模板进行开发,对于其他外形的机器人,虽然可以正常使用,但是效果可能不佳。
传感器信息
1.环境深度信息
无论是SLAM还是自主导航,获取周围环境的深度信息都是至关重要的。要获取深度信息,首先要清楚ROS中的深度信息是如何表示的。针对激光雷达,ROS在sensor_msgs包中定义了专用数据结构——LaserScan,用于存储激光消息。LaserScan消息的具体定义如图9-6所示。
rosmsg show sensor_msgs/LaserScan

·angle_min:可检测范围的起始角度。
·angle_max:可检测范围的终止角度,与angle_min组成激光雷达的可检测范围。
·angle_increment:采集到相邻数据帧之间的角度步长。
·time_increment:采集到相邻数据帧之间的时间步长,当传感器处于相对运动状态时进行
补偿使用。
·scan_time:采集一帧数据所需要的时间。
·range_min:最近可检测深度的阈值。
·range_max:最远可检测深度的阈值。
·ranges:一帧深度数据的存储数组。
如果使用的机器人没有激光雷达,但配备有Kinect等RGB-D摄像头,也可以通过红外摄像头获取周围环境的深度信息。但是RGB-D摄像头获取的原始深度信息是三维点云数据,而ROS的很多功能包所需要的输入是激光二维数据,是否可以将三维数据转换成二维数据呢?如果你已不记得RGB-D摄像头所发布的点云三维数据的类型,可以回顾7.1节的相关内容。
如果你已了解点云三维数据类型,那么将三维数据降维到二维数据的方法也很简单,即把大量数据拦腰斩断,只抽取其中的一行数据,重新封装为LaserScan消息,就可以获取到需要的二维激光雷达信息。这么做虽然损失了大量有效数据,但是刚好可以满足2D SLAM的需求。
原理就是这么简单,ROS中也提供了相应的功能包——depthimage_to_laserscan,可以在launch文件中使用如下方法调用:
<!-- 运行depthimage_to_laserscan节点,将点云深度数据转换成激光数据 -->
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan" output="screen">
<remap from="image" to="/camera/depth/image_raw" />
<remap from="camera_info" to="/camera/depth/camera_info" />
<remap from="scan" to="/scan" />
<param name="output_frame_id" value="/camera_link" />
</node>
2.里程计信息
里程计根据传感器获取的数据来估计机器人随时间发生的位置变化。在机器人平台中,较为常见的里程计是编码器,例如,机器人驱动轮配备的旋转编码器。当机器人移动时,借助旋转编码器可以测量出轮子旋转的圈数,如果知道轮子的周长,便可以计算出机器人单位时间内的速度以及一段时间内的移动距离。里程计根据速度对时间的积分求得位置这种方法对误差十分敏感,所以采取如精确的数据采集、设备标定、数据滤波等措施是十分必要的。
导航功能包要求机器人能够发布里程计nav_msgs/Odometry消息。如图9-7所示,nav_msgs/Odometry消息包含机器人在自由空间中的位置和速度估算值。
·pose:机器人当前位置坐标,包括机器人的x、y、z三轴位置与方向参数,以及用于校正误差的协方差矩阵。
·twist:机器人当前的运动状态,包括x、y、z三轴的线速度与角速度,以及用于校正误差的协方差矩阵。
上述数据结构中,除速度与位置的关键信息外,还包含用于滤波算法的协方差矩阵。在精度要求不高的机器人系统中,可以使用默认的协方差矩阵;而在精度要求较高的系统中,需要先对机器人精确建模后,再通过仿真、实验等方法确定该矩阵的具体数值。文章来源:https://www.toymoban.com/news/detail-721494.html
rosmsg show nav_msgs/Odometry
 文章来源地址https://www.toymoban.com/news/detail-721494.html
文章来源地址https://www.toymoban.com/news/detail-721494.html
到了这里,关于机器人SLAM与自主导航的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![【ROS】—— 机器人导航(仿真)—导航实现(十八)[重要][重要][重要]](https://imgs.yssmx.com/Uploads/2024/02/789274-1.png)