文章:3D Registration with Maximal Cliques
作者:Xiyu Zhang Jiaqi Yang* Shikun Zhang Yanning Zhang
编辑:点云PCL
代码:
https://github.com/zhangxy0517/3D-Registration-with-Maximal-Cliques.git
欢迎各位加入知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。
公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
作为计算机视觉中的一个基础问题,3D点云配准(PCR)旨在寻找最佳位姿实现点云的对齐。本文提出了一种基于最大团的3D配准方法(MAC)。关键思想是放宽以往的最大团约束,在图中挖掘更多的局部一致性信息以生成准确的位姿假设:
1)构建兼容性图,以反映初始对应点云之间的关系。
2)在图中搜索最大团,每个最大团表示一个一致性集合。然后通过节点引导的团选择,选择具有最大图权重的最大团。
3)通过SVD算法计算所选团的变换假设,选择最佳假设进行配准。
在U3M、3DMatch、3DLoMatch和KITTI上进行了大量实验证明,MAC有效地提高了配准准确性,超过了各种最先进的方法,并提升了深度学习方法的性能,MAC与深度学习方法的结合在3DMatch / 3DLoMatch上实现了95.7%/ 78.9%的配准召回率,达到了最先进水平。
主要贡献
在本文中,我们提出了一种基于最大团(MAC)的仅凭几何信息的3D配准方法,关键的思路是放宽之前的最大团约束,从图中挖掘更多的局部一致性信息以生成准确的位姿假设。首先,我们将初始对应集合建模为兼容性图,其中每个节点表示一个单独的对应关系,两个节点之间的边表示一对兼容的对应关系。其次,我们在图中搜索最大团,然后使用节点引导的团过滤将每个图节点与包含它的适当最大团进行匹配,与最大团相比,MAC是一个更宽松的约束条件,能够从图中挖掘更多的局部信息,这有助于我们从图中获得大量正确的假设。最后,我们使用SVD算法为选定的团计算变换假设,并使用RANSAC家族中的流行假设评估指标选择最佳假设进行配准。总之,我们的主要贡献如下:
引入了一种名为MAC的假设生成方法,相比之前的最大团约束,MAC方法能够从图中挖掘更多的局部信息,我们证明了MAC生成的假设即使在存在大量异常值的情况下也具有很高的准确性。
基于MAC提出了一种新颖的PCR方法,在U3M、3DMatch、3DLoMatch和KITTI数据集上实现了最先进的性能,值得注意的是,仅凭几何信息的MAC方法胜过了一些最先进的深度学习方法,MAC还可以作为模块插入多个深度学习框架中,以提升它们的性能,MAC与GeoTransformer结合在3DMatch / 3DLoMatch上实现了95.7%/ 78.9%的最先进的配准召回率。

图1. 低重叠点云对上的最大团和最大团的比较,在低内点比例下,最大团(MAC)有效地选择了具有低旋转误差(RE)和平移误差(TE)的最优6自由度变换假设,而最大团在这种情况下失败了。
主要内容
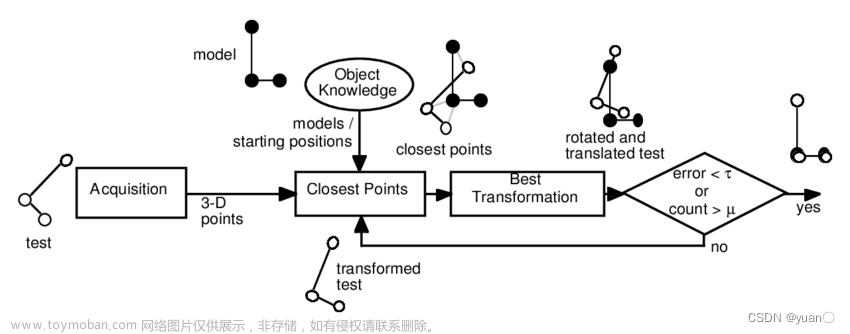
该方法在技术上非常简单,其流程如图2所示。

图2. MAC的流程。1.为初始对应关系集构建图。2.从图中选择一组最大团作为一致性集合。3.根据一致性集合生成和评估假设。4.选择最佳假设进行3D配准。
图构建
图空间可以更准确地描述对应关系之间的关联关系,而不仅仅是几何空间,因此,我们将初始对应关系建模为一个兼容性图,其中对应关系由节点表示,边连接几何上兼容的节点。在这里考虑了两种方法来构建兼容性图。
这两种图构建方法都可以适应我们的框架,与FOG相比,SOG具有更严格的边构建条件和更高的与相邻节点的兼容性,SOG更稀疏,这有助于更快地搜索团。
搜索最大团
为了生成假设,基于RANSAC的方法会反复从对应关系集合中随机采样,然而,它们无法充分挖掘对应关系之间的关系。理论上,内点会在图中形成团,因为内点通常在几何上彼此兼容,之前的工作专注于在图中搜索最大团,但最大团是一个非常严格的约束条件,只关注图中的全局一致性信息,相反,我们放宽了约束,并利用最大团来挖掘更多的局部图信息。
节点引导的团选择
在执行最大团搜索过程后得到了最大团集合MACinitial,实际上MACinitial通常包含成千上万个最大团,如果考虑所有最大团,将会非常耗时。这里介绍了一种节点引导的团选择方法,以减少MACinitial的规模,首先计算MACinitial中每个团的权重,然后只保留具有最大权重的团,从剩余的团中删除重复的团,得到MACselected。这样做的动机是利用节点周围的局部几何结构信息,找到最佳的一组一致对应节点。
对应关系生成和评估
从前一步筛选出的每个最大团都代表了一组一致的对应关系,通过对每个一致性集合应用SVD算法,可以得到一组6自由度的位姿假设。
实验
数据集
使用了四个数据即数据集U3M,场景尺度的室内数据集3DMatch和3DLoMatch,以及场景尺度的室外数据集KITTI ,U3M数据集包含496个点云对,3DLoMatch是3DMatch的子集,其中点云对的重叠率范围在10%到30%之间,非常具有挑战性。
评估标准
采用了均方根误差(RMSE)度量标准来评估U3M对象尺度数据集上的3D点云配准性能,此外还采用旋转误差(RE)和平移误差(TE)来评估场景尺度数据集上的配准结果。结果表明,MAC的性能最好,并且明显优于所有经过测试的类RANSAC估计器,如SAC-COT、OSAC、SAC-IA和RANSAC,基于MAE评估指标,MAC在U3M上的配准性能是最好的。

图3中进行了广泛的比较,在这里测试了以下方法,包括SAC-COT、OSAC 、SAC-IA、RANSAC 、SC2-PCR 、FGR、GO-ICP 和PPF ,其中前四种方法都是基于RANSAC的方法,均方根误差(RMSE)阈值从0.5 pr变化到5 pr,步长为0.5 pr。
PCR方法的比较,考虑了几何-仅有方法和深度学习方法进行比较,包括SM,FGR ,RANSAC,TEASER++ ,CG-SAC,SC2-PCR ,3DRegNet,DGR,DHVR 和PointDSC ,结果显示在表1和表2中。


我们将几种最先进的深度学习方法与MAC进行集成,进行评估。考虑的方法包括FCGF、SpinNet 、Predator 、CoFiNet 和GeoTransformer,每种方法在不同数量的样本下进行测试,这里指的是采样点或对应点的数量,结果在表3中报告。

在表4中,我们对DGR、PointDSC、TEASER++、RANSAC 、CG-SAC 、SC2-PCR 和MAC等方法进行了比较,并报告了它们的结果。

在3DMatch和3DLoMatch数据集上进行了消融研究和分析实验,并将结果显示在表5中。

表8展示了MAC的时间效率分析。

在图5-8中展示了更多的配准结果。




总结
本文提出了MAC方法来解决PCR问题,通过使用最大团约束从对应关系中生成精确的位姿假设,在所有测试的数据集上取得了最先进的性能,并且可以适应深度学习方法以提高它们的性能。
更多详细内容后台发送“知识星球”加入知识星球查看更多。
3D视觉与点云学习星球:主要针对智能驾驶全栈相关技术,3D/2D视觉技术学习分享的知识星球,将持续进行干货技术分享,知识点总结,代码解惑,最新paper分享,解疑答惑等等。星球邀请各个领域有持续分享能力的大佬加入我们,对入门者进行技术指导,对提问者知无不答。同时,星球将联合各知名企业发布自动驾驶,机器视觉等相关招聘信息和内推机会,创造一个在学习和就业上能够相互分享,互帮互助的技术人才聚集群。
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享与合作方式:微信“cloudpoint9527”(备注:姓名+学校/公司+研究方向) 联系邮箱:dianyunpcl@163.com。
为分享的伙伴们点赞吧!文章来源:https://www.toymoban.com/news/detail-721759.html
 文章来源地址https://www.toymoban.com/news/detail-721759.html
文章来源地址https://www.toymoban.com/news/detail-721759.html
到了这里,关于CVPR2023最佳论文候选:3D点云配准新方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!