文章目录
- 前言
- 一、学习目的
- 二、代码记录
前言
将数据通过蓝牙发送到手机上,是学生学习单片机的必备技能之一,它可以将手机作为简单的上位机,从而使数据直观地展现出来。
蓝牙的初始化、蓝牙接受数据以及蓝牙简单应用的介绍和代码记录,可以看一看下面的文章,这次就主要记录一下蓝牙发送数据的学习。
HC-05蓝牙模块的使用_hc05蓝牙调试助手_KAIs32的博客-CSDN博客
STM32学习记录——使用蓝牙点亮LED_stm32蓝牙点灯_KAIs32的博客-CSDN博客
Arduino学习记录——蓝牙控制舵机(含LED指示灯)_arduino蓝牙控制舵机_KAIs32的博客-CSDN博客
一、学习目的

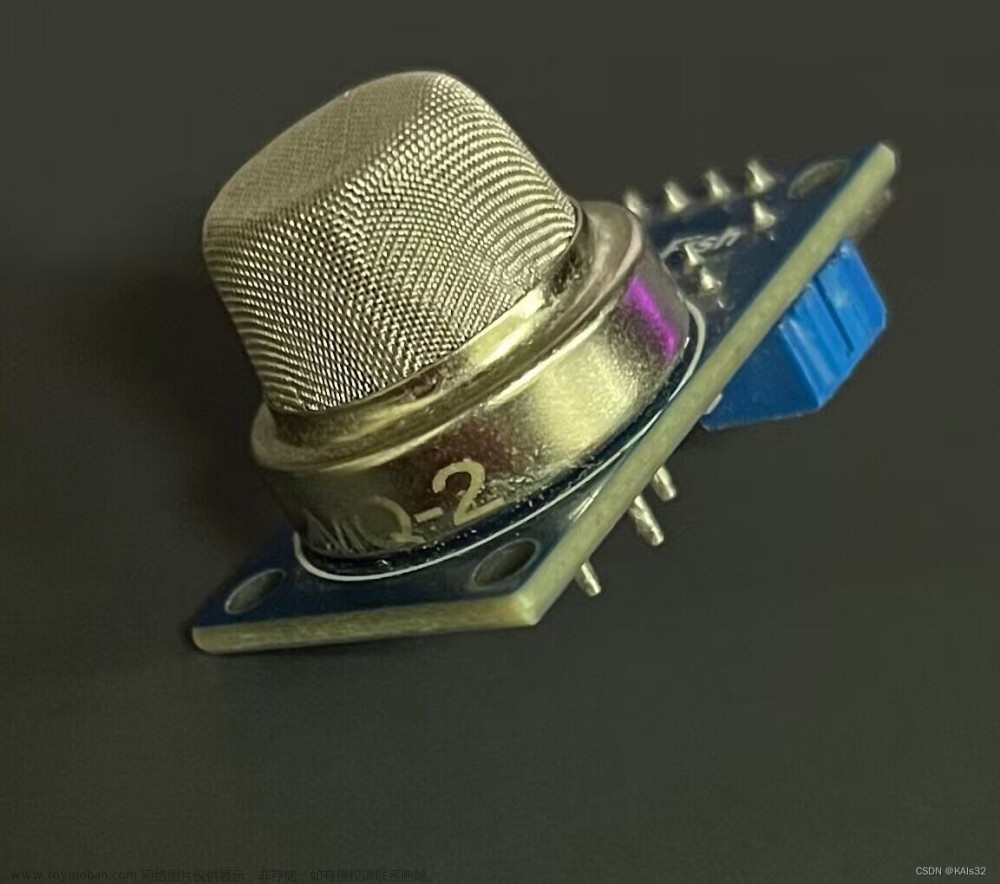
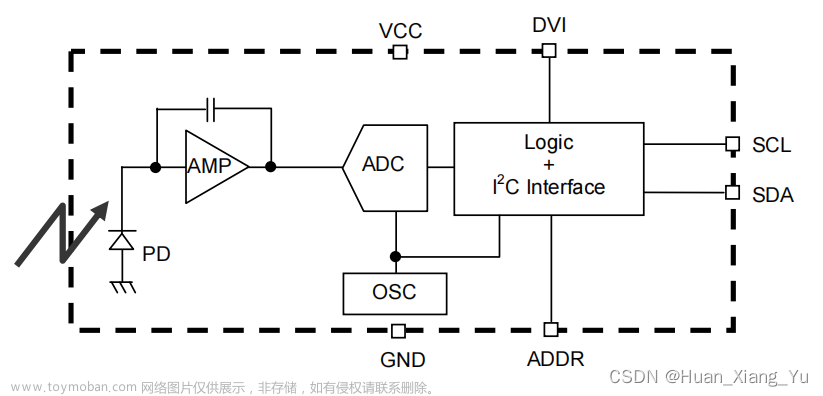
我主要是想通过蓝牙发送数据,将单片机上烟雾传感器、光敏传感器、火焰传感器等模块检测到的数据实时显示在手机上,达到实时监控的目的。
至于传感器的初始化,这里就不重复记录了,可以看看下面的文章进行复习。
STM32学习记录——光敏传感器的使用_stm32光敏传感器_KAIs32的博客-CSDN博客
STM32学习记录——烟雾传感器的使用_mq2烟雾传感器stm32代码_KAIs32的博客-CSDN博客
二、代码记录
首先是各个传感器的初始化,我统一写在了同一个.c文件里。
adc.h
#ifndef __ADC_H
#define __ADC_H
#include "stm32f10x.h"
void ADC_Pin_Init(void); //传感器引脚、ADC初始化
float ADC_Trans(void); //烟雾传感器获取数据
#endif
adc.c
#include "adc.h"
#include "sys.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_adc.h"
void ADC_Pin_Init(void) //传感器引脚、ADC初始化
{
GPIO_InitTypeDef GPIO_InitStruct;
ADC_InitTypeDef ADC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_ADC1|RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //烟雾传感器
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1; //光敏传感器
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //火焰传感器
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
ADC_InitStruct.ADC_ContinuousConvMode = ENABLE;
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;
ADC_InitStruct.ADC_NbrOfChannel = 1;
ADC_InitStruct.ADC_ScanConvMode = DISABLE;
ADC_Init(ADC1,&ADC_InitStruct);
ADC_RegularChannelConfig(ADC1,ADC_Channel_1,1,ADC_SampleTime_239Cycles5);
ADC_RegularChannelConfig(ADC1,ADC_Channel_8,1,ADC_SampleTime_239Cycles5);
ADC_ITConfig(ADC1,ADC_IT_EOC,ENABLE);
ADC_Cmd(ADC1,ENABLE);
}
float ADC_Trans (void) //烟雾传感器获取数据
{
float adc_value = 0;
u8 i = 0;
ADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime_239Cycles5);
for(i = 0; i < 50; i++)
{
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
adc_value = adc_value + ADC_GetConversionValue(ADC1);
}
return adc_value / 50;
}
接下来就是蓝牙模块初始化的代码
hc05.h
#ifndef __HC05_H
#define __HC05_H
#include "sys.h"
void My_USART2_Init(void); //串口初始化函数
//void USART2_IRQHandler(void); //接受数据函数(这里不用,可以注释掉)
void Bluetooth_SendData(char* data); //发送数据函数
#endif
hc05.c
代码中有注释,可以看一看
#include "hc05.h"
#include "usart.h"
//u8 res;
void My_USART2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStrue;
USART_InitTypeDef USART_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
//初始化RXD、TXD两个引脚
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_2;
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue);
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue);
//设置串口参数
USART_InitStrue.USART_BaudRate=9600;
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStrue.USART_Parity=USART_Parity_No;
USART_InitStrue.USART_StopBits=USART_StopBits_1;
USART_InitStrue.USART_WordLength=USART_WordLength_8b;
USART_Init(USART2,&USART_InitStrue);
USART_Cmd(USART2,ENABLE);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
//优先级设置
NVIC_InitStrue.NVIC_IRQChannel=USART2_IRQn;
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStrue);
}
//void USART2_IRQHandler(void)
//{
// if(USART_GetITStatus(USART2,USART_IT_RXNE)!=RESET)
// {
// res= USART_ReceiveData(USART2);
USART_SendData(USART2,res);
// }
//}
void Bluetooth_SendData(char* data)
{
while (*data)
{
USART_SendData(USART2, *data++);
while (USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET);
}
}
最后是主函数
main.c文章来源:https://www.toymoban.com/news/detail-722252.html
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "adc.h"
#include "hc05.h"
#define BUFFER_SIZE 100
char buffer[BUFFER_SIZE];
int main(void)
{
float ad = 0;
My_USART2_Init();
delay_init();
uart_init(115200);
ADC_Pin_Init();
while(1)
{
if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1)==0 && 0 == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0))
{
ad = ADC_Trans();
snprintf(buffer, BUFFER_SIZE, "ad0 Data: %f\r\nfire\r\nbright\r\n", ad);
Bluetooth_SendData(buffer);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
delay_ms(1000);
}
else if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1)==1 && 0 == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0))
{
ad = ADC_Trans();
snprintf(buffer, BUFFER_SIZE, "ad0 Data: %f\r\nfire\r\ndarkness\r\n", ad);
Bluetooth_SendData(buffer);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
delay_ms(1000);
}
else if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1)==1 && 1 == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0))
{
ad = ADC_Trans();
snprintf(buffer, BUFFER_SIZE, "ad0 Data: %f\r\nfireless\r\ndarkness\r\n", ad);
Bluetooth_SendData(buffer);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
delay_ms(1000);
}
else if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1)==0 && 1 == GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0))
{
ad = ADC_Trans();
snprintf(buffer, BUFFER_SIZE, "ad0 Data: %f\r\nfireless\r\nbright\r\n", ad);
Bluetooth_SendData(buffer);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);
delay_ms(1000);
}
delay_ms(100);
}
}
主函数比较复杂,实现的功能主要是实时显示烟雾浓度、是否有光和是否有火,可以在这个基础上进行修改和删减。由于是写记录时稍加修改后的代码,可能有一定的小问题,如果遇到问题或者需要源码可以评论交流一下。文章来源地址https://www.toymoban.com/news/detail-722252.html
到了这里,关于STM32学习记录——蓝牙发送数据(手机显示传感器数据)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!