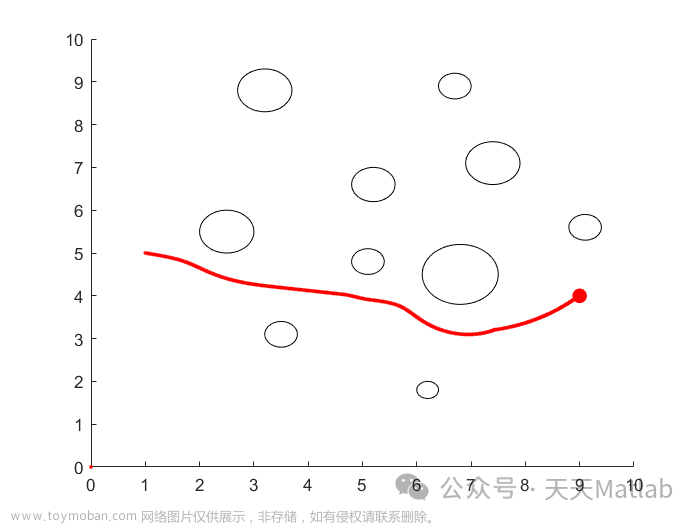
在机器人的导航和路径规划领域,人工势场算法是一种常用的方法。该算法通过将机器人周围的环境建模为势场,并根据势场的梯度信息引导机器人避开障碍物,从而规划出安全的路径。本文将介绍基于人工势场算法的机器人避障路径规划的MATLAB代码,并解释其实现原理。
首先,我们需要定义机器人和障碍物的模型。假设机器人是一个点,可以用其坐标表示。障碍物可以是一个多边形或圆形,每个障碍物都有一个势场。机器人和障碍物之间的势场通过距离函数定义,距离函数越小表示势场越大。
在MATLAB中,我们可以定义机器人和障碍物的坐标。假设机器人的坐标为(x_robot, y_robot),障碍物的坐标为(x_obstacle, y_obstacle),其中x和y分别表示坐标轴上的位置。文章来源:https://www.toymoban.com/news/detail-723402.html
接下来,我们需要计算机器人所受到的总势场。总势场由机器人与所有障碍物的势场叠加而成。我们可以使用以下公式计算机器人所受到的总势场:文章来源地址https://www.toymoban.com/news/detail-723402.html
function total_potential = calculate_total_potential(x_robot, y_robot, obstacles)
total_potential = 0;
for i = 1:length(obstacles)
x_obstacle = obstacles(i).x;
y_obstacle = obstacles(i).y;
distance = sqrt((x_robot - x_obstacle)^2 + (y_robot - y_obstacle)^2);
potential = 1 / distance; % 简化模型,距离越近势场越大
total_potential = total_potential + potential;
end
end
到了这里,关于基于人工势场算法的机器人避障路径规划(MATLAB代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!