ESP32修改BootLoader:在boot中添加GPIO和IIC驱动方式
1. ESP Bootloader简介
ESP32有着强大的引导加载程序(Bootloader)功能:
主要执行以下任务:
内部模块的最小化初始配置;
根据分区表和 ota_data(如果存在)选择需要引导的应用程序(app)分区;
将此应用程序映像加载到 RAM(IRAM 和 DRAM)中,最后把控制权转交给应用程序。
引导加载程序位于 Flash 的 0x1000 偏移地址处。
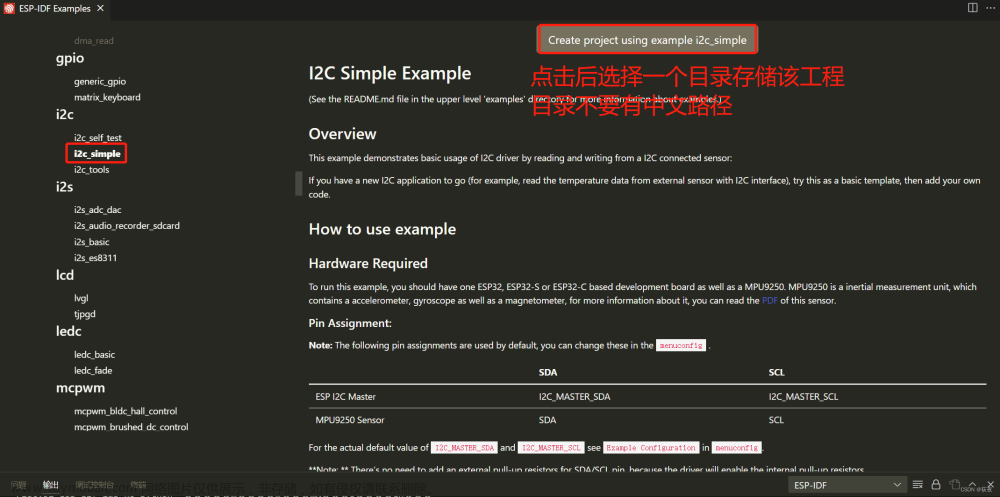
2. Bootloader修改方式
这里引用C站一个作者的文章,写的不错:点这里
文章分为上下两篇,下篇。
当涉及到用户有特殊BootLoader功能需求时,需要用户自行修改,修改方式主要有:
通过钩子函数。扩展原来的bootloader流程,打个补丁。
通过覆盖bootloader。重写一个bootloader,覆盖原来bootloader的逻辑来运行。
可以发现,这两种方式一个针对小改动需求,一个针对大改动的需要。
怎么添加自己的功能
如果在应用层开发,会做些什么?
嗯,你会在component目录下新建自己功能名的文件夹
之后呢?不知道了… 那就看看component其他组件都放了啥吧。哦,有CMakeLists.txt,component.mk,还有代码目录。那咱们依葫芦画瓢,也放上这些东西。
然后?既然有Cmake的东西,那就看看里面都说了啥。哦,原来里面就是设置好了要编译哪些源文件,头文件目录在哪里,还有配置好编译选项啊,库路径什么的。
是的,这些东西在bootloader里面都有,方法类似。就我的开发方式而言,mycode放在bootloader_support目录下之后,里面的源文件、头文件、库这些的,都跟应用层开发一样。该在CMakeLists.txt加什么就加。
这跟在boot还是在app其实就没啥关系,是CMake这种跨平台编译方式的基本操作。
3. 我的修改方式
本文主要讲解其中一种修改方式:mycode放在bootloader_support目录下之后,里面的源文件、头文件、库这些的,都跟应用层开发一样。该在CMakeLists.txt加什么就加。
下图是本人在bootloader_support文件夹中添加的个人代码“tc2x”
并在CmakeLists.txt中添加需要编译的源文件和头文件目录
此时,完成了在bootloader_support添加自己的代码。
4. 修改bootloader_utility.c文件
如图,我的boot修改内容主要是基于boot跳转APP失败时,跑一段自己的驱动和应用。
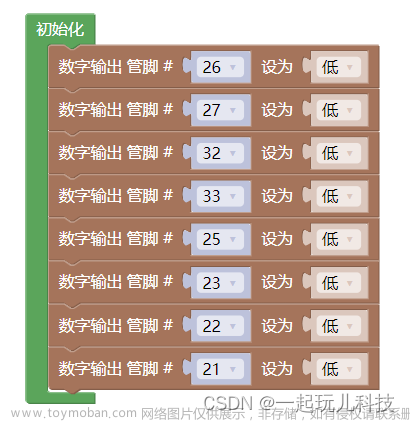
5. 在bootloader中实现GPIO控制
实现代码:
#include <string.h>
#include <stdint.h>
#include <limits.h>
#include "esp_attr.h"
#include "esp_log.h"
#include "esp_err.h"
#include "esp_rom_sys.h"
#include "esp_rom_uart.h"
#include "sdkconfig.h"
#include "esp_rom_crc.h"
#include "esp_rom_gpio.h"
#include "esp_rom_efuse.h"
#include "soc/gpio_periph.h"
#include "soc/soc_caps.h"
#include "hal/gpio_ll.h"
#include "hal/gpio_types.h"
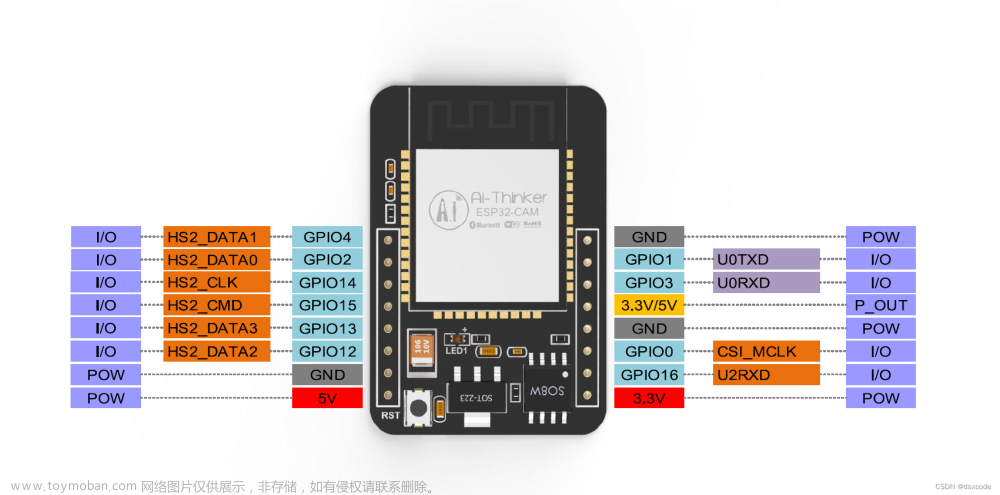
#define CFG_I2C_SCL_PORT GPIO_PORT_0
#define CFG_I2C_SCL_PIN 18
#define CFG_I2C_SDA_PORT GPIO_PORT_0
#define CFG_I2C_SDA_PIN 17
#define PIN_OUTPUT_ENABLE(PIN_NAME) SET_PERI_REG_MASK(PIN_NAME,FUN_IE)
#define PIN_OUTPUT_DISABLE(PIN_NAME) CLEAR_PERI_REG_MASK(PIN_NAME,FUN_IE)
void HAL_GPIO_WritePin(int gpio_port, int gpio_pin, int level)
{
gpio_ll_set_level(&GPIO, gpio_pin, level);
}
uint8_t HAL_GPIO_ReadPin(int gpio_port, int gpio_pin)
{
return gpio_ll_get_level(&GPIO, gpio_pin);
}
void HAL_GPIO_SetOut(int gpio_port, int gpio_pin)
{
esp_rom_gpio_pad_select_gpio(gpio_pin);
// if (GPIO_PIN_MUX_REG[gpio_pin]) {
// PIN_INPUT_DISABLE(GPIO_PIN_MUX_REG[gpio_pin]);
// PIN_SLP_OUTPUT_ENABLE(GPIO_PIN_MUX_REG[gpio_pin]);
// }
esp_rom_gpio_pad_pullup_only(gpio_pin);
gpio_ll_output_enable(&GPIO, gpio_pin);
//gpio_ll_sleep_output_enable(&GPIO, gpio_pin);
}
void HAL_GPIO_SetIn(int gpio_port, int gpio_pin)
{
esp_rom_gpio_pad_select_gpio(gpio_pin);
// if (GPIO_PIN_MUX_REG[gpio_pin]) {
// PIN_INPUT_ENABLE(GPIO_PIN_MUX_REG[gpio_pin]);
// PIN_SLP_OUTPUT_DISABLE(GPIO_PIN_MUX_REG[gpio_pin]);
// }
esp_rom_gpio_pad_pullup_only(gpio_pin);
gpio_ll_input_enable(&GPIO, gpio_pin);
// gpio_ll_sleep_input_enable(&GPIO, gpio_pin);
}
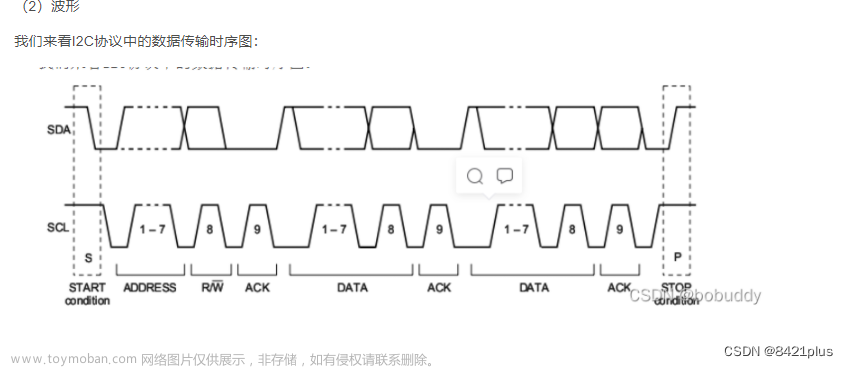
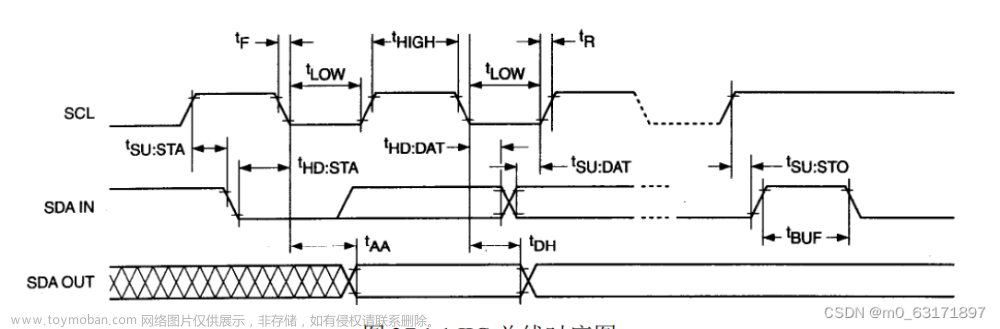
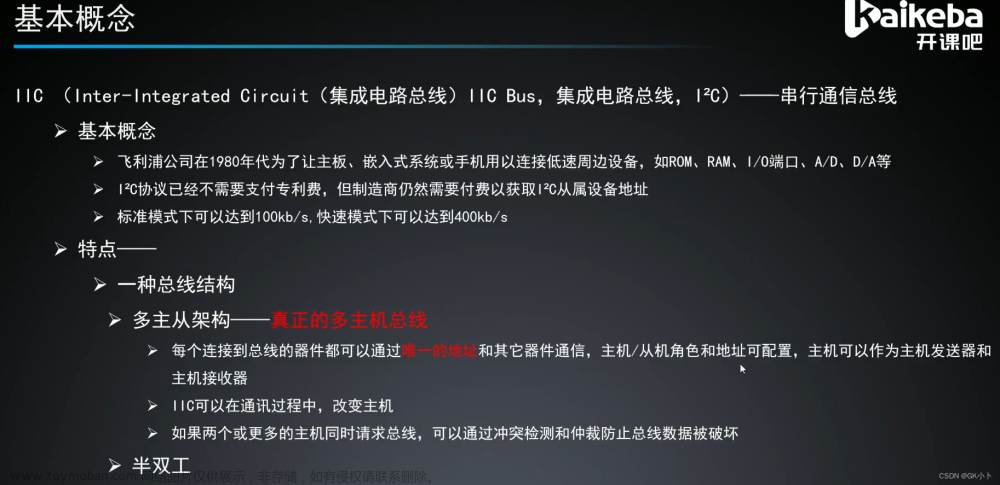
6. 在bootloader中实现IIC控制
代码实现:文章来源:https://www.toymoban.com/news/detail-724612.html
void I2C_DELAY(uint32_t us)
{
esp_rom_delay_us(us);
}
static const char* TAG = "[GPIOIIC]";
#define IIC1 0
#define IIC2 1
#define IICX 0XFF
#define GPIO_PIN_SET 1
#define GPIO_PIN_RESET 0
static int I2C_SCL_PORT = 0;
static int I2C_SCL_PIN = 18;
static int I2C_SDA_PORT = 0;
static int I2C_SDA_PIN = 17;
#define us_num 2
#define I2C_READ_BIT (0x01) //!< If this bit is set in the address field, transfer direction is from slave to master.
#define I2C_WRITE_BIT (0xFE)
static void I2C_SEL(uint8_t I2Cn, uint8_t scl, uint8_t sda)
{
switch(I2Cn)
{
case IIC1:
I2C_SCL_PORT = CFG_I2C_SCL_PORT;
I2C_SCL_PIN = CFG_I2C_SCL_PIN;
I2C_SDA_PORT = CFG_I2C_SDA_PORT;
I2C_SDA_PIN = CFG_I2C_SDA_PIN;
break;
case IIC2:
I2C_SCL_PORT = CFG_I2C_SCL_PORT;
I2C_SCL_PIN = CFG_I2C_SCL_PIN;
I2C_SDA_PORT = CFG_I2C_SDA_PORT;
I2C_SDA_PIN = CFG_I2C_SDA_PIN;
break;
default:
I2C_SCL_PORT = CFG_I2C_SCL_PORT;
I2C_SCL_PIN = scl;
I2C_SDA_PORT = CFG_I2C_SDA_PORT;
I2C_SDA_PIN = sda;
break;
}
}
static void I2C_SCL_OUTPUT(void)
{
HAL_GPIO_SetOut(I2C_SCL_PORT, I2C_SCL_PIN);
}
static void I2C_SCL_INPUT(void)
{
HAL_GPIO_SetIn(I2C_SCL_PORT, I2C_SCL_PIN);
}
static void I2C_SCL_HIGH(void)
{
HAL_GPIO_WritePin(I2C_SCL_PORT, I2C_SCL_PIN, GPIO_PIN_SET);
}
static void I2C_SCL_LOW(void)
{
HAL_GPIO_WritePin(I2C_SCL_PORT, I2C_SCL_PIN, GPIO_PIN_RESET);
}
static void I2C_SDA_OUTPUT(void)
{
HAL_GPIO_SetOut(I2C_SDA_PORT, I2C_SDA_PIN);
}
static void I2C_SDA_INPUT(void)
{
HAL_GPIO_SetIn(I2C_SDA_PORT, I2C_SDA_PIN);
}
static void I2C_SDA_HIGH(void)
{
HAL_GPIO_WritePin(I2C_SDA_PORT, I2C_SDA_PIN, GPIO_PIN_SET);
}
static void I2C_SDA_LOW(void)
{
HAL_GPIO_WritePin(I2C_SDA_PORT, I2C_SDA_PIN, GPIO_PIN_RESET);
}
static uint8_t I2C_SDA_READ(void)
{
return HAL_GPIO_ReadPin(I2C_SDA_PORT, I2C_SDA_PIN);
}
static uint8_t I2C_SCL_READ(void)
{
return HAL_GPIO_ReadPin(I2C_SCL_PORT, I2C_SCL_PIN);
}
void I2C_SCL_SDA_TEST(void)
{
I2C_SCL_OUTPUT();
I2C_SDA_OUTPUT();
I2C_SDA_HIGH();
I2C_SDA_LOW();
}
static void I2C_Init(int scl, int sda)
{
I2C_SEL(IICX, scl, sda);
I2C_SCL_INPUT();
I2C_SDA_INPUT();
I2C_SCL_OUTPUT();
I2C_SCL_HIGH();
I2C_SDA_OUTPUT();
I2C_SDA_HIGH();
}
static bool i2c_master_clear_bus(void);
static bool i2c_master_issue_startcondition(void);
static bool i2c_master_issue_stopcondition(void);
static bool i2c_master_clock_byte(uint_fast8_t databyte);
static bool i2c_master_clock_byte_in(uint8_t *databyte, bool ack);
static bool i2c_master_wait_while_scl_low(void);
bool gpioi2c_master_init(uint8_t sclpin, uint8_t sdapin)
{
I2C_Init(sclpin, sdapin);
return i2c_master_clear_bus();
}
static bool i2c_master_clear_bus(void)
{
bool bus_clear;
I2C_SDA_HIGH();
I2C_SCL_HIGH();
I2C_DELAY(1);
if (I2C_SDA_READ() == 1 && I2C_SCL_READ() == 1)
{
bus_clear = true;
}
else if (I2C_SCL_READ() == 1)
{
bus_clear = false;
ESP_LOGE(TAG, "i2c_master_clear_bus 1 fail");
for (uint_fast8_t i = 18; i--;)
{
I2C_SCL_LOW();
I2C_DELAY(1);
I2C_SCL_HIGH();
I2C_DELAY(1);
if (I2C_SDA_READ() == 1)
{
bus_clear = true;
break;
}
}
}
else
{
bus_clear = false;
ESP_LOGE(TAG, "i2c_master_clear_bus 2 fail");
}
return bus_clear;
}
static bool i2c_master_issue_startcondition(void)
{
I2C_SCL_OUTPUT();
I2C_SDA_OUTPUT();
I2C_SDA_HIGH();
I2C_DELAY(1);
if (!i2c_master_wait_while_scl_low())
{
ESP_LOGE(TAG, "i2c_master_wait_while_scl_low fail");
return false;
}
I2C_SDA_LOW();
I2C_DELAY(1);
// Other module function expect SCL to be low
I2C_SCL_LOW();
I2C_DELAY(1);
return true;
}
static bool i2c_master_issue_stopcondition(void)
{
I2C_SDA_LOW();
I2C_DELAY(1);
if (!i2c_master_wait_while_scl_low())
{
ESP_LOGE(TAG, "i2c_master_issue_stopcondition fail");
return false;
}
I2C_SDA_HIGH();
I2C_DELAY(1);
return true;
}
static bool i2c_master_clock_byte(uint_fast8_t databyte)
{
bool transfer_succeeded = true;
I2C_SDA_OUTPUT();
// MSB first
for (uint_fast8_t i = 0x80; i != 0; i >>= 1)
{
I2C_SCL_LOW();
I2C_DELAY(1);
if (databyte & i)
{
I2C_SDA_HIGH();
}
else
{
I2C_SDA_LOW();
}
if (!i2c_master_wait_while_scl_low())
{
ESP_LOGE(TAG, "i2c_master_clock_byte fail");
transfer_succeeded = false; // Timeout
break;
}
}
I2C_SCL_LOW();
I2C_DELAY(1);
I2C_SDA_INPUT();
I2C_DELAY(1);
transfer_succeeded &= i2c_master_wait_while_scl_low();
transfer_succeeded &= !(I2C_SDA_READ());
I2C_SCL_LOW();
I2C_DELAY(1);
I2C_SDA_OUTPUT();
return transfer_succeeded;
}
static bool i2c_master_clock_byte_in(uint8_t *databyte, bool ack)
{
uint_fast8_t byte_read = 0;
bool transfer_succeeded = true;
I2C_SDA_INPUT();
for (uint_fast8_t i = 0x80; i != 0; i >>= 1)
{
if (!i2c_master_wait_while_scl_low())
{
ESP_LOGE(TAG, "i2c_master_clock_byte_in 1 fail");
transfer_succeeded = false;
break;
}
if (I2C_SDA_READ())
{
byte_read |= i;
}
else
{
// No need to do anything
}
I2C_SCL_LOW();
I2C_DELAY(1);
}
I2C_SDA_OUTPUT();
*databyte = (uint8_t)byte_read;
if (ack)
{
I2C_SDA_LOW();
}
else
{
I2C_SDA_HIGH();
}
I2C_DELAY(1);
if (!i2c_master_wait_while_scl_low())
{
ESP_LOGE(TAG, "i2c_master_clock_byte_in 2 fail");
transfer_succeeded = false; // Timeout
}
I2C_SCL_LOW();
I2C_DELAY(1);
return transfer_succeeded;
}
static bool i2c_master_wait_while_scl_low()
{
uint8_t timeout_counter = 30;
I2C_SCL_HIGH();
I2C_DELAY(1);
while (I2C_SCL_READ() == 0)
{
if (timeout_counter-- == 0)
{
ESP_LOGE(TAG, "i2c_master_wait_while_scl_low fail");
return false;
}
else
{
I2C_DELAY(3);
}
}
return true;
}
bool gpioi2c_master_read(uint8_t address, uint8_t reg_addr, uint8_t * data, uint8_t data_length, bool issue_stop_condition)
{
bool transfer_succeeded = true;
transfer_succeeded &= i2c_master_issue_startcondition();
transfer_succeeded &= i2c_master_clock_byte(address&I2C_WRITE_BIT);
/** send the address of register which you want to read*/
transfer_succeeded &= i2c_master_clock_byte(reg_addr);
/** must send 2 times start condition */
transfer_succeeded &= i2c_master_issue_startcondition();
transfer_succeeded &= i2c_master_clock_byte(address|I2C_READ_BIT);
/* Transfer direction is from Slave to Master */
while (data_length-- && transfer_succeeded)
{
// To indicate to slave that we've finished transferring last data byte
// we need to NACK the last transfer.
if (data_length == 0)
{
transfer_succeeded &= i2c_master_clock_byte_in(data, (bool)false);
}
else
{
transfer_succeeded &= i2c_master_clock_byte_in(data, (bool)true);
}
data++;
}
if (issue_stop_condition || !transfer_succeeded)
{
transfer_succeeded &= i2c_master_issue_stopcondition();
}
return transfer_succeeded;
}
bool gpioi2c_master_write(uint8_t address, uint8_t reg_addr, uint8_t * data, uint8_t data_length, bool issue_stop_condition)
{
bool transfer_succeeded = true;
transfer_succeeded &= i2c_master_issue_startcondition();
ESP_LOGD(TAG, "gpioi2c_master_write transfer_succeeded1=%d",transfer_succeeded);
transfer_succeeded &= i2c_master_clock_byte(address&I2C_WRITE_BIT);
ESP_LOGD(TAG, "gpioi2c_master_write transfer_succeeded2=%d",transfer_succeeded);
/** send the address of register which you want to write */
transfer_succeeded &= i2c_master_clock_byte(reg_addr);
ESP_LOGD(TAG, "gpioi2c_master_write transfer_succeeded3=%d",transfer_succeeded);
/* Transfer direction is from Master to Slave */
while (data_length-- && transfer_succeeded)
{
transfer_succeeded &= i2c_master_clock_byte(*data);
data++;
}
if (issue_stop_condition || !transfer_succeeded)
{
transfer_succeeded &= i2c_master_issue_stopcondition();
ESP_LOGD(TAG, "gpioi2c_master_write transfer_succeeded4=%d",transfer_succeeded);
}
return transfer_succeeded;
}
7. 总结
通过以上方式,可以实现在esp32修改BootLoader代码,并实现GPIO和IIC驱动,从而实现自己的修改需求。文章来源地址https://www.toymoban.com/news/detail-724612.html
到了这里,关于ESP32修改BootLoader:在boot中添加GPIO和IIC驱动方式的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!