路径规划是机器人导航领域的关键任务之一,它涉及到如何在复杂环境中找到一条安全、高效的路径,使机器人能够避开障碍物并到达目标位置。人工势场算法是一种常用的路径规划方法,它模拟了物体之间的相互作用力,并通过计算机模拟来实现机器人的避障行为。本文将介绍如何使用Matlab实现基于人工势场算法的机器人避障路径规划。
- 算法原理
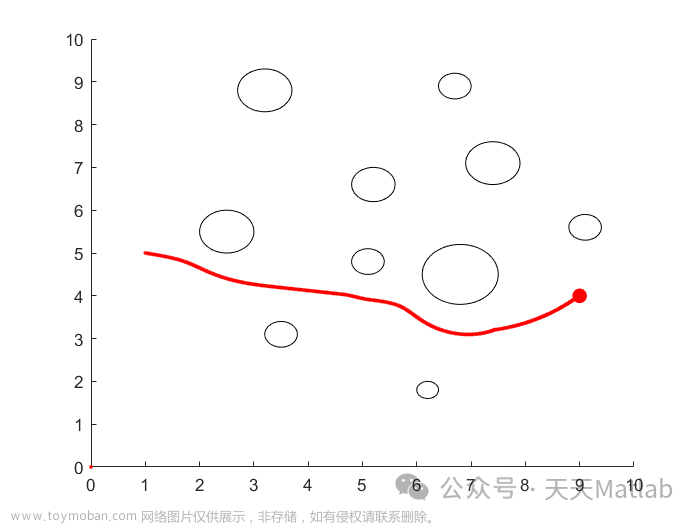
人工势场算法基于两种力:引力和斥力。引力使机器人被吸引到目标点,而斥力则使机器人远离障碍物。通过在环境中生成这些力,机器人可以根据力的合成来确定最佳的移动方向。算法的基本步骤如下:
1.1 初始化机器人和目标点的位置。
1.2 计算机器人受到的引力和斥力。引力的大小与机器人与目标点之间的距离成反比,斥力的大小与机器人与障碍物之间的距离成正比。
1.3 计算机器人受到的总力,即引力和斥力的合成。
1.4 根据总力的方向和大小,更新机器人的位置。
1.5 重复步骤1.2至1.4,直到机器人到达目标点或达到最大迭代次数。文章来源:https://www.toymoban.com/news/detail-725074.html
- Matlab实现
下面是使用Matlab实现基于人工势场算法的机器人避障路径规划的示例代码:文章来源地址https://www.toymoban.com/news/detail-725074.html
% 定义机器人和目标点的初始位置
robotPosition = [0, 0到了这里,关于基于人工势场算法的机器人避障路径规划(Matlab实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!