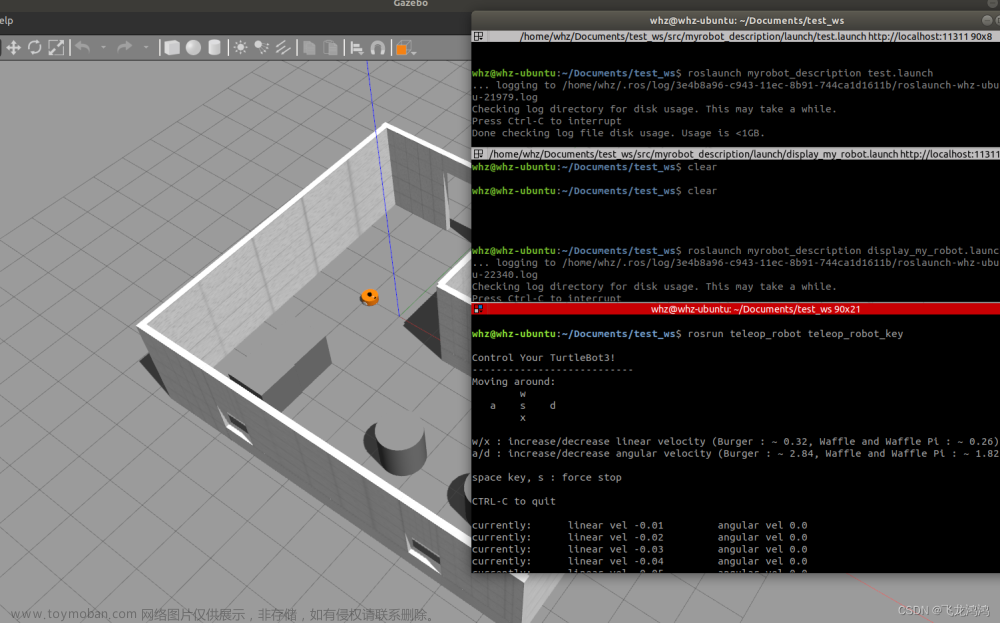
图一是,机器人小车启动roscore,笔记本虚拟机启动乌龟及控制节点,不知道为什么不能移动了,折腾了好久。之前是可以移动的,截图的时候鼠标点的不是控制移动的窗口,企图控制移动的时候,也点了对应窗口,还是不能移动。
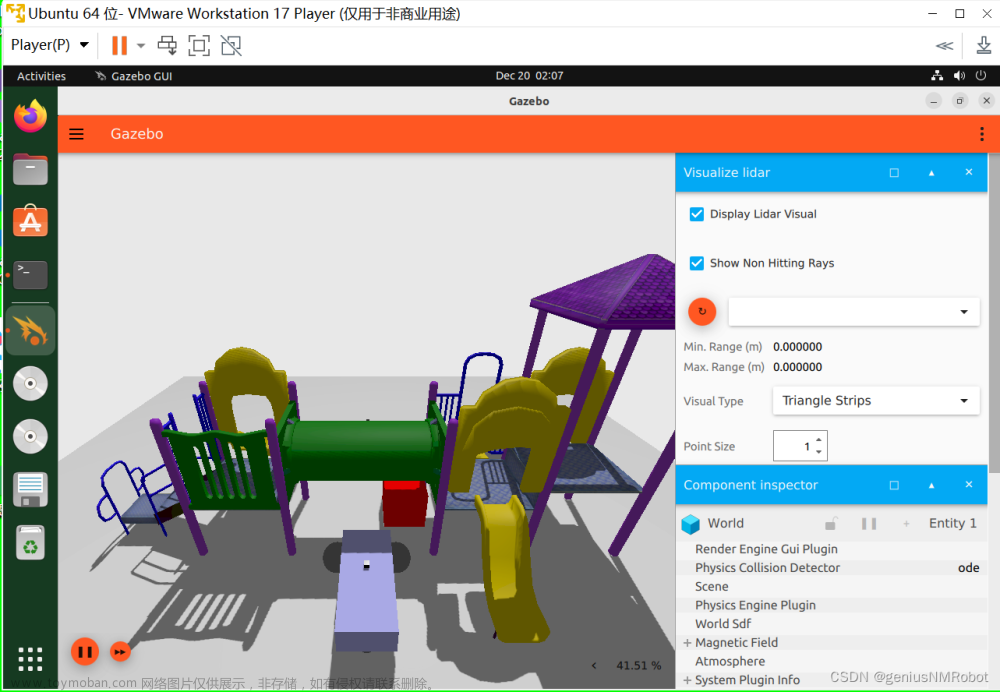
但是来到图二,是笔记本远程控制小车上的ubuntu系统,在小车上是可以正常实现控制小海龟移动的例程。文章来源:https://www.toymoban.com/news/detail-725209.html
这是怎么回事?文章来源地址https://www.toymoban.com/news/detail-725209.html
到了这里,关于ROS小海龟小乌龟不能移动了的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!