一、简介
ICP算法总共分为6个阶段,如下图所示:

(1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。
(2)匹配特征点。通常是距离最近的两个点,当然这需要视评判的准则而定。
(3) 加权。根据点的匹配程度对找到的对应点进行加权。
(4)抑制匹配点。根据匹配点的匹配程度来对一些质量较差的点对进行抑制(剔除)。
(5)误差最小化。通过最小化距离的平方和来估计变换参数。
(6)点云变换。通过评估出的变换矩阵来转换源点云。文章来源:https://www.toymoban.com/news/detail-725482.html
整个过程除了最后一步,剩余的步骤已有大量的文献进行过探索和研究,这里是较为经典的点到点ICP算法的实现。文章来源地址https://www.toymoban.com/news/detail-725482.html
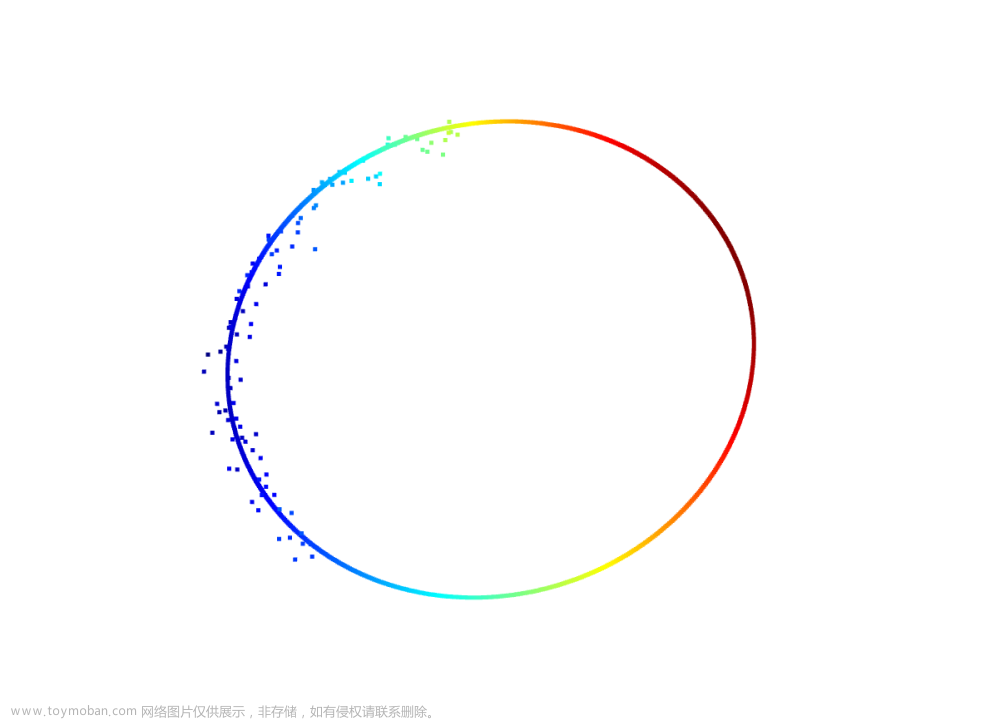
二、实现代码
<到了这里,关于Open3D 点云ICP精配准(纯Python详细步骤版本,点到点)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!