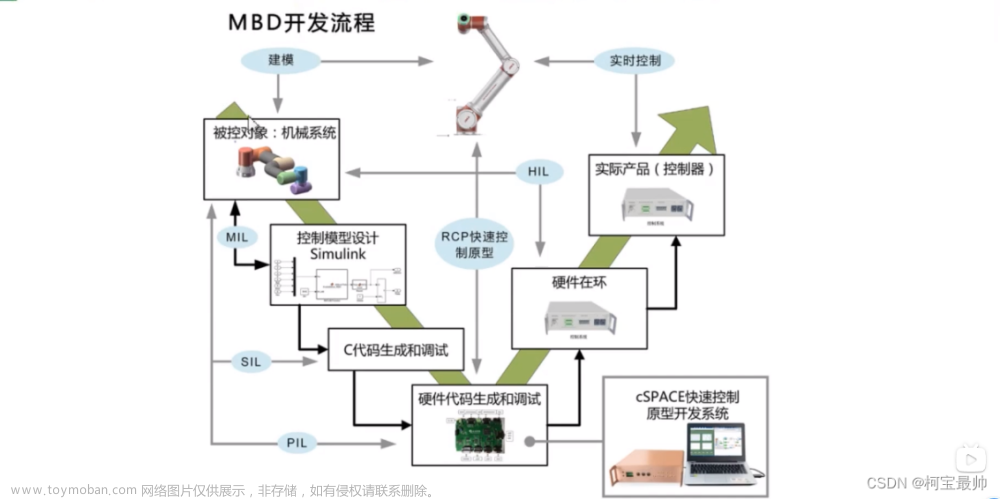
工业机器人具备出色的灵活性和运动能力,广泛应用于工业制造领域。它们可以完成装配、焊接、喷涂、搬运、加工、品质检测等任务,提高了生产效率,保证了产品质量。此外,在医疗领域也有辅助手术等特殊应用,展现了其在多个领域的重要作用。针对工业机器人控制系统的开发对于推动工业自动化、提升生产效率与品质、降低成本、促进技术创新以及提高企业竞争力等方面具有非常重要的作用。
一、应用背景
实体机器人系统一般由控制器、驱动与电机、机械臂本体三部分组成。其中:
控制器:负责整个机器人系统的运动控制。通过EtherCAT总线或硬线信号与关节电机驱动器连接,将位置、速度、电流等控制指令发送给电机驱动器。驱动与电机:将控制器发送的指令解析成电流信号,从而驱动机械臂的关节电机。机械臂本体:指机械臂的实际物理结构,包括关节、链杆、末端执行器等部件。电机通过减速机等传动装置将动力传递到机械臂。
控制器会将位置、速度、电流等指令发送给驱动器,驱动器会解析这些指令并转化为电流信号来驱动相应的电机。电机通过传动装置传递力矩到机械臂,同时会受到机械臂的负载、自重、惯性力、摩擦力等合成的负载力矩的影响。
驱动器将各个电机的状态信息(如位置、速度、电流等)反馈给控制器,控制器根据机械臂的实际反馈信号、运动指令以及控制模型,计算下一个周期的位置、速度、电流控制指令,从而实现对机械臂的精确控制。
这样的系统结构和工作原理保证了机器人能够按照设定的轨迹和动作来执行各种任务。同时,反馈环节也保证了机器人能够对外部环境做出相应的调整,从而保证了其稳定性和精度。
在机器人控制系统的研究与开发过程中,传统的方法涉及将控制器直接连接到电机和机械本体以验证算法,但这带来了庞大的开发工作量和严重的设备安全和人员安全风险。功能与性能测试中,机械部件磨损可能导致数据不具可比性,难以模拟各种异常情况。对于机器人应用培训,实体机器人昂贵且操作潜在风险高,现有仿真软件又无法适用于不同品牌的机器人。
为解决上述问题,灵思创奇研发了一套机器人HIL仿真系统,可以直接和用户的机器人控制器对接,帮助用户完成控制算法验证和操作培训等工作。
二、方案介绍
机器人HIL仿真系统以实时仿真机为核心,通过EtherCAT从站板卡实现与机器人控制器的数据通信,上位机主要完成人机交互部分,运行机器人本体建模软件、仿真管理软件和机器人三维场景软件,这种系统架构非常适用于需要高度实时性和精确性的机器人控制与仿真应用场景。
Links-RT实时仿真软件包:灵思创奇公司自主开发的半实物仿真系统软件,可提供模型管理,仿真控制、变量绑定、变量监控、变量在线调参、变量存储、离线分析等功能。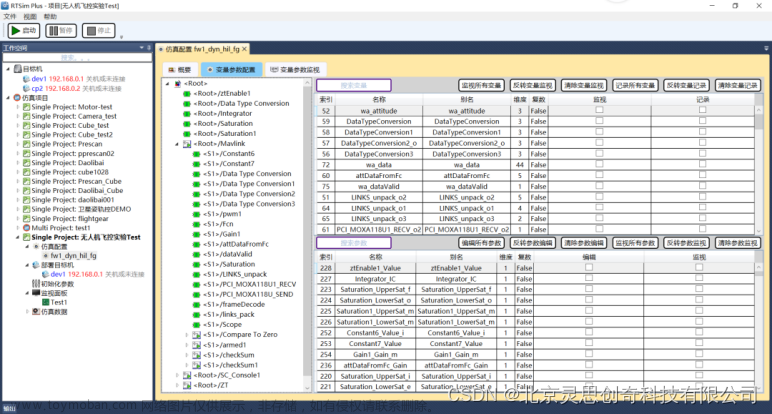
Links-Box 03实时仿真机:配备了强大的多核CPU和可选的Simulink可编程FPGA,可实现MHz(微秒)范围闭环采样率。实时解算机器人本体和电机模型,保证了系统的实时性和准确性,托管了EtherCAT从站卡,通过PCI接口连接以保证与机器人控制器的稳定通信。
Ethercat从站仿真卡:负责实现与机器人控制器之间的数据交互,通过EtherCAT协议实现高效的实时通信。 文章来源:https://www.toymoban.com/news/detail-725674.html
文章来源:https://www.toymoban.com/news/detail-725674.html
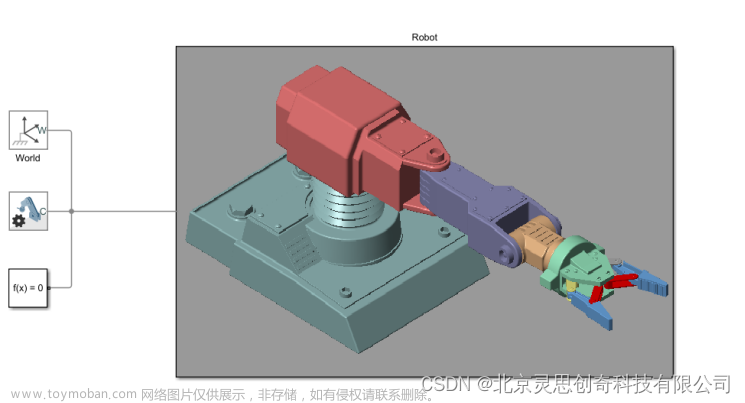
机器人本体建模软件Simscape Multibody:提供丰富的机械组件和工具,支持多领域协作、自定义模块开发,以及实时仿真,使工程师能够快速、精确地建立机器人模型并进行全面的仿真与控制研究。
机器人三维场景软件VREP:全面而多功能的三维仿真环境,专为机器人研究与开发设计。它允许用户创建、模拟和与各种机器人系统和环境进行交互。
三、应用场景
3.1工业机器人研发与测试
该系统可以用于工业机器人的研发与测试阶段。实时仿真机能够模拟机器人的运动行为,包括关节运动、末端执行器的运动等,从而进行控制算法的开发和验证。通过实时仿真,可以在封闭环境中进行机器人控制算法的开发和测试,避免了在实际硬件上进行繁琐的调试和测试工作。
3.2机器人动力学分析
利用实时仿真机和机器人本体建模软件,可以进行机器人的动力学分析,包括各关节的力、扭矩、速度等参数的实时计算和模拟。通过仿真,可以在不同工况下对机器人的动力学性能进行研究,为机器人的设计和优化提供参考。
3.3控制算法验证
过实时仿真机和EtherCAT从站板卡,可以将控制算法实时部署到仿真环境中,与机器人本体进行交互,验证控制算法的准确性和稳定性,能够快速验证控制算法的性能,避免了在实际机器人上进行反复试错的过程。
3.3教学与培训
学生可以通过上位机进行交互式学习,理解机器人的运动学和动力学原理,同时可以通过仿真实验进行实践操作,提供了一个安全、可控的学习环境,同时可以在虚拟场景中进行多样化的实验。
四、方案总结
方案将仿真与实际硬件相结合,通过实时验证控制算法、降低测试成本与风险、优化工程设计、提升教学与培训效果、支持多样化应用场景以及提高团队协作效率,为机器人控制系统的研发与应用提供了高效、安全的解决方案,具备显著实用价值。文章来源地址https://www.toymoban.com/news/detail-725674.html
到了这里,关于机器人硬件在环仿真:解决实体开发与测试挑战,提升效率与安全性的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!