目录
摘 要......................................................................................................................... 1
第一章 绪论............................................................................................................. 4
1.1 研究课题背景......................................................................................... 5
1.2 机械手技术国内外发展现状................................................................ 6
1.3 机械手的发展方向................................................................................. 9
1.4 PLC工业应用现状................................................................................. 9
1.5 选题来源及意义................................................................................... 10
1.6 本课题的选题意义与论文结构.......................................................... 11
第二章 机械手控制系统与分析....................................................................... 12
2.1 机械手工作过程及结构组成.............................................................. 12
2.1.1 机械手工作过程....................................................................... 13
2.1.2 机械手结构组成....................................................................... 13
2.2 机械手控制功能要求........................................................................... 16
2.3 控制方案确立....................................................................................... 17
2.4 控制结构设计....................................................................................... 19
2.5 机械手驱动的选择............................................................................... 19
2.5.1 步进电机.................................................................................... 20
2.5.2 步进电机的选择....................................................................... 20
第三章 PLC机械手控制系统的总体设计...................................................... 21
3.1 PLC机械手的工作原理...................................................................... 21
3.2 可编程控制器(PLC)的选型.......................................................... 22
3.2.1 PLC机型选择的考虑因素...................................................... 22
3.2.2 三菱PLC的相关介绍.............................................................. 22
3.2.3 PLC的选型............................................................................... 23
第四章 软件介绍................................................................................................. 24
4.1 三菱PLC- FX2N.................................................................................. 24
4.2 FX2N及之前的系列型号说明........................................................... 25
第五章 软件分析与仿真.................................................................................... 26
5.1 控制系统功能流程............................................................................... 26
5.2 PLC编程与调试................................................................................... 27
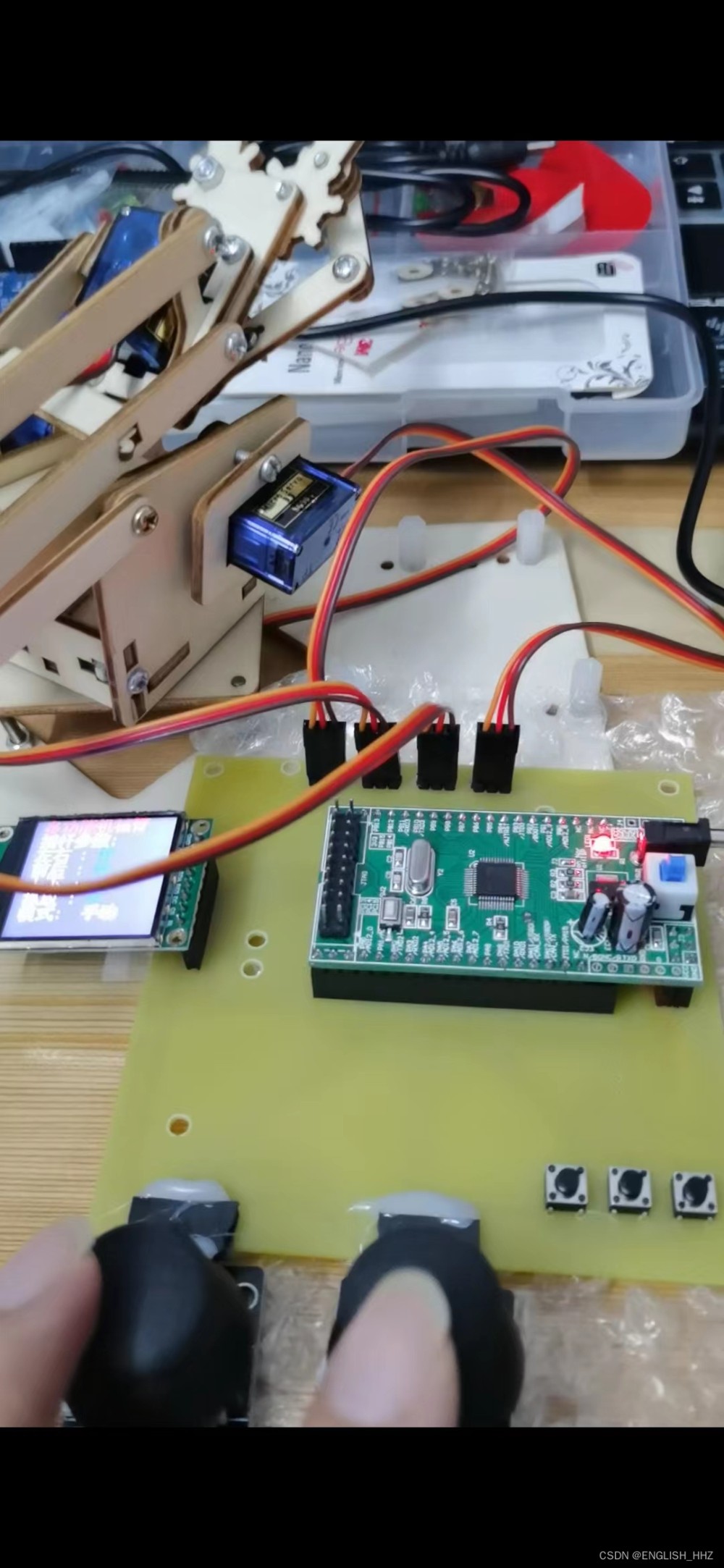
5.3 实物演示................................................................................................ 33
第六章 结束语....................................................................................................... 34
参考文献................................................................................................................. 34
致 谢................................................................................................................. 36
摘 要
随着科学技术的日新月异,市场竞争激烈、人工成本上涨,以往人工操作的搬运方式已经不能满足当前高度自动化的需要。减轻劳动强度,保陌生产的可靠性、安全性,降低生产成本,提高产品的质噩及经济效益是企业生成所必须面临的重大问题。
机械手是能够模仿人手动作,并按设定程序、轨迹和要求代替人手抓(吸)取、搬运工件或工具或进行操作的自动化装置,它能部分的代替人的手工劳动。 较高级型式的机械手,还能模拟人的手臂动作,完成较复杂的作业。在机械制造业中,机械手已被广泛应用,从而大大地改善了工人的劳动条件,显著的提高劳动生产率,加快实现工业生产机械化和自动化的步伐。
本文将通过西门子PLC控制机械手,PLC是可编程控制器(Programmable Logic Controller)的简称,是在继电顺序控制基础上发展起来的以微处理器为核心的通用的工业自动化控制装置。随着电子技术和计算机技术的迅猛发展,PLC 的功能也越来越强大,更多地具有计算机的功能。目前PLC已经在智能化、网络化方面取得了很好的发展。该系统利用西门子PLC,在步进电机驱动下,完成对机械手在搬运过程中的下降、夹紧、上升、右旋、下降、放松、上升、左旋等全过程自动化控制,并对非正常情况实行自动报警和自动保护,实现企业的机电一体化,提高企业的生产效率。
关键词:机械手;自动化;PLC;可编程控制器
Abstract
With the rapid development of science and technology, fierce market competition and rising labor costs, the previous manual handling methods have been unable to meet the needs of the current high degree of automation.To reduce labor intensity, to ensure the reliability and safety of unfamiliar production, to reduce production costs, to improve the quality of products and economic benefits are the major problems that enterprises must face.
Manipulator is able to imitate the hand action, and according to the set procedures, track and requirements instead of hand grasp (suction) take, moving workpiece or tools or operation of the automatic device, it can partially replace the manual labor.More advanced type of manipulator, but also can simulate the human arm action, to complete more complex operations.In the machinery manufacturing industry, manipulator has been widely used, thus greatly improving the working conditions of workers, significantly improve labor productivity, accelerate the pace of mechanization and automation of industrial production.
This paper will control the manipulator through Siemens PLC. PLC is the abbreviation of Programmable Logic Controller, which is a universal industrial automation control device with microprocessor as the core developed on the basis of relay sequence control.With the rapid development of electronic technology and computer technology, the function of PLC is more and more powerful, more has the function of computer.At present, PLC has achieved good development in intelligence and network.Using Siemens PLC, this system under the stepper motor drive, complete the manipulator in the process of moving down, clamping, up, right, down, relax, up, left handed the whole process of automation control, and implements automatic alarm and automatic protection for abnormal situation, achieve the electromechanical integration of the enterprise, improve the production efficiency of enterprises.
Key words: Manipulator;Automation;PLC;Programmable controller
第一章 绪论
1.1 研究课题背景
工业机械手是近几十年发展起来的一种高科技自动生产设备。工业机械手也是工业机器人的一个重要分支。他的特点是可以通过编程来完成各种预期的作业, 在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性 。 机械手作业的准确性和环境中完成作业的能力,在国民经济领域有省广泛的发展空间 。
机械手的发展是由千它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。因而,受到很多国家的重视,投入大量的人力物力来研究和应用。尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。在我国近几年也有较快的发展,并且取得一定的效果,受到机械工业 的。
机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。
机械手的结构形式开始比较简单,专用性较强。随蓿工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。由于通用机械手能很快的改变工作程序,适应性较强, 所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
1.2 机械手技术国内外发展现状
机械手是近代自动控制领域中出现的一项新技术,并已成为现代科技的一个重要组成部分。汽车业的快速发展,车外型愈求美观流线,并由于汽车外板件要求完美无尘的冲压生产线也向高速化、高品质、自动化、柔性化方向发展。传统冲压生产过程中的手工操作、人工送料的生产方式已无法满足该行业的需要。
机械手的积极作用正日益为人们所认识,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。因此,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。因此, 受到各先进单位的重视并投入了大擢的人力物力加以研究和应用。尤其在高温、 高压、粉尘、噪声的场合,用得更为广泛。在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
传统观点认为,气体具有压缩性,因此,在气动伺服系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。此外,气源工作压力较低, 抓举力较小。气动技术作为机器人中的驱动功能已经被工业界广泛接受,对于 气动机器人伺服控制体系的研究起步较晚,但已取得了重要成果,它在工业自动化领域应用正在受到越来越多的广泛关注。
现代汽车制造工厂的生产线,尤其是主要工艺是焊接的生产线,大多采用了机械手。车身在每个工序的移动;车身外壳被真空吸盘吸起和放下,在指定工位的夹紧和定位;点焊机焊头的快速接近、减速软蓿陆后的变压控制点焊,都采用了各种特殊功能的机械手。高频率的点焊、力控的准确性及完成整个工序过程的高度自动化,堪称是最有代表 性的机械手应用之一。
此外机械手还应用千酒、油漆灌装气动机械手;自动加盖、安装和拧紧机械手,牛奶盒装箱机械手,特别是机械手被广泛应用于制药与医疗器械上。如: DaVinci外科手术机器手等。
上世纪60年代末期,世界知名也是美国最大规模的汽车制造企业:通用公司因业务发展需求,同时汽车研发也需要与时俱进,不断更新,故当务之急就是寻找一种全新的生产线控制方案,在尽可能紧缩继电器控制系统的重新设计成本和降低系统中硬件连线的数量的基础上,节约生产成本,缩短制造工期,降低总生产线的故障几率,从而达到提高生产效率、增加经济效益的目的。依据当时电子计算机的硬件方面发展较为成熟的背景,其中大多数功能可以从软件入手来达成需求,同时软件也具有灵活度高、适用性强、升级更新方便等优点,但存在的弊端是:价格普遍比较昂贵、运维成本较高。于是经过不懈思考后他们得出了一个创新性的方案:将继电器控制系统与计算机二者结合,形成一套全新的工业控制系统。经过公开招标和竞标流程后,由一家名为DEC的美国数字科技公司中标:DEC公司研发出了达到以上设计预期且较为功能完善的工业控制装置。即为可编程逻辑控制器( Programmable Logic Controller)。19世纪70年代,在GM公司的汽车制造生产线中第一次成功运行了PLC,并且成功淘汰了多年来所使用的普通继电器控制系统,虽然当时的PLC仅有逻辑控制、定时、计数等较简单功能,但这不可谓不是一次自动控制技术发展的里程碑。到了20世纪80年代,随着微型处理器和微型计算机的问世和发展,这些新的技术也被应用至PLC当中,进一步拓展了PLC的各种功能:如数据处理、计数运算、信息传输等功能。在经过PLC技术的不断科研攻关和功能完善后,国内外业界也越来越重视和承认这项全新的自动化技术。如今,以PLC为基础的工业控制系统已被广泛运用在如机械爪、传送带、初级机器人等工业领域。
我国在发展PLC的发展道路上,也投入了不可计数的时间、人力及经费成本。在上世纪70年代初期,我国决定开始引入国外较先进的PLC相关技术,并且得到了一些初步的成果。进入80年代后,国内众多工业制造公司开始大力研发PLC相关技术:上海的ABB工程公司、沈阳的鑫松机器自动化公司等,并且已可以初步将PLC与公司自研的工业生产线做出一定的结合应用。20世纪90年代,上海科马公司、欧迪西(青岛)机电有限公司等企业均开发出了更加适合用户需要的PLC机械手控制系统。目前来说,在国内基于PLC的机械手系统所需进口比例仍占比较大,近五年的数据显示,仍然占比50%左右,约20000台。这说明我国在迈向自动化科技水平领先大国的道路上,仍然需要面对国际环境、技术限制、科研攻关等重大挑战。自动化行业的发展也是近几年来我国政府需要更加重视并且给予政策、资金等方面支持的,坚信在不久的将来依靠我国综合实力的不断提升、科技水平逐渐进步,国产PLC机械手系统相关技术会日趋成熟,最终走出国门,得到越来越多国家的使用与肯定。
1.3 机械手的发展方向
精度是指机器人、机械手到达指定点的精确程度,它与驱动器的分辨率以及反馈装置有关。重复精度是指如果动作 重复多次,机械手到达同样位置的精确程度。重复精度比精度更重要,如果一个机器人定位不够精确,通常会显示一个固定的误差,这个误差是可以预测的,因此可以通过编程予以校正。重复精度限定的是一个随机误差的范围,它通过一定次数地重复运行机器人来测定。随着微电子技术和现代控制技术的发展,以及气动伺服技术走出实验室和气动伺服定位系统的成套化。气动机械手的重复精度将越来越高,它的应用领域也将更广阔, 如核工业和军事工业等。
完整论文+程序+实物图点击如下链接下载:文章来源:https://www.toymoban.com/news/detail-725919.html
https://download.csdn.net/download/weixin_45905610/80614400https://download.csdn.net/download/weixin_45905610/80614400文章来源地址https://www.toymoban.com/news/detail-725919.html
到了这里,关于基于PLC的机械手控制系统设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!