基于粒子群算法的机器人动态路径规划
粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,常用于解决优化问题。在机器人动态路径规划中,粒子群算法可以被应用于寻找最优路径,以使机器人在动态环境中能够高效地规划路径并避免障碍物。
本文将介绍如何使用Matlab实现基于粒子群算法的机器人动态路径规划,并提供相应的源代码。
-
问题建模
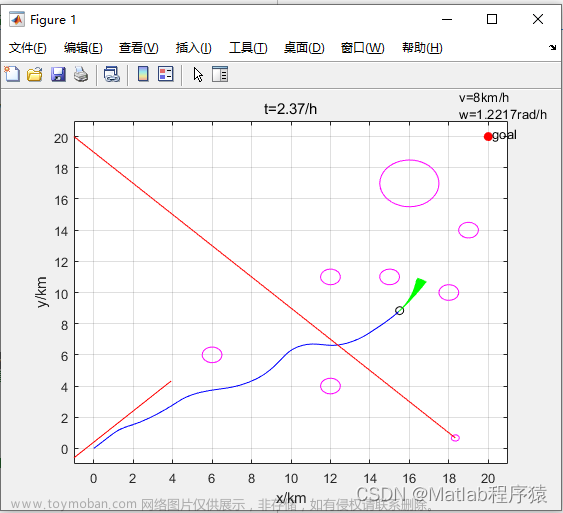
首先,我们需要将机器人动态路径规划问题建模为一个优化问题。假设我们有一个动态环境,其中包含起始点、目标点和一些障碍物。我们的目标是找到机器人的最优路径,使得机器人能够从起始点到达目标点,并且避免碰撞障碍物。在这个问题中,机器人的路径可以表示为一系列的位置坐标。 -
粒子群算法
粒子群算法是一种模拟鸟群觅食行为的优化算法。在算法开始时,随机生成一群粒子,每个粒子表示一个潜在解。粒子的位置表示解的候选解,速度表示粒子在搜索空间中的移动方向和速度。通过迭代更新粒子的位置和速度,粒子群算法能够在搜索空间中寻找到最优解。 -
动态路径规划算法
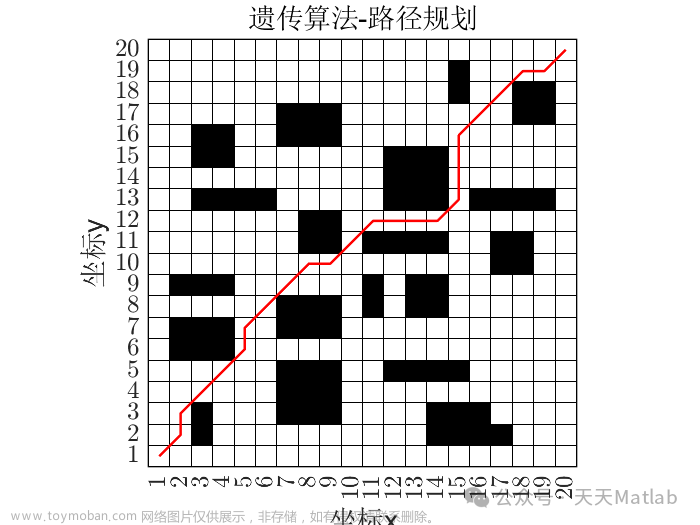
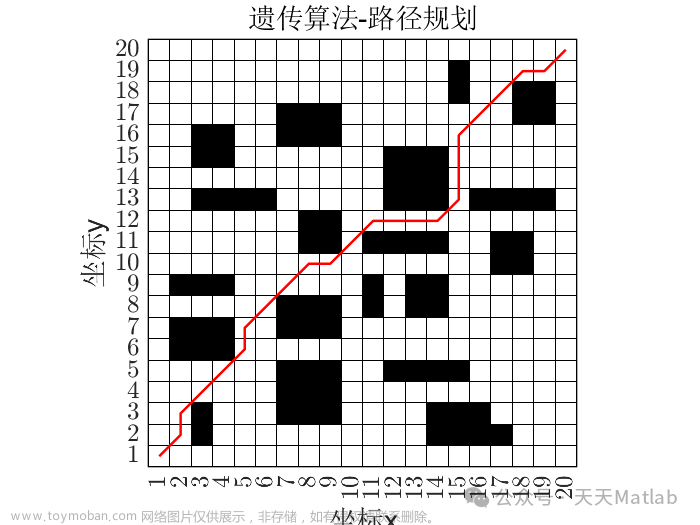
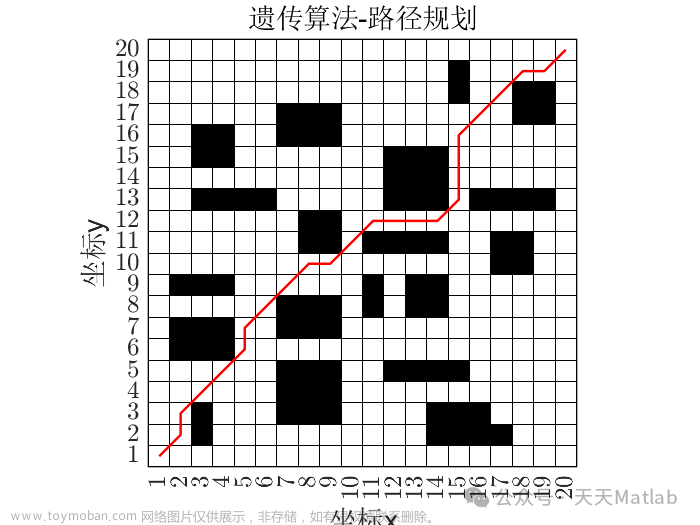
基于粒子群算法的机器人动态路径规划可以分为以下步骤:
步骤1:初始化粒子群
- 随机生成一群粒子,每个粒子代表一个机器人的路径解。每个路径解都是由一系列位置坐标组成的。
步骤2:评估粒子适应度
- 根据路径解评估每个粒子的适应度。适应度可以根据路径的长度、碰撞障碍物的次数等因素进行评估。
步骤3:更新粒子的速度和位置
- 根据粒子的历史最优解和群体的历史最优解,更新粒子的速度和位置。速度的更新涉及惯性项、认知项和社会项。文章来源:https://www.toymoban.com/news/detail-728331.html
步骤4:判断终止条件
- 判断文章来源地址https://www.toymoban.com/news/detail-728331.html
到了这里,关于基于粒子群算法的机器人动态路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!