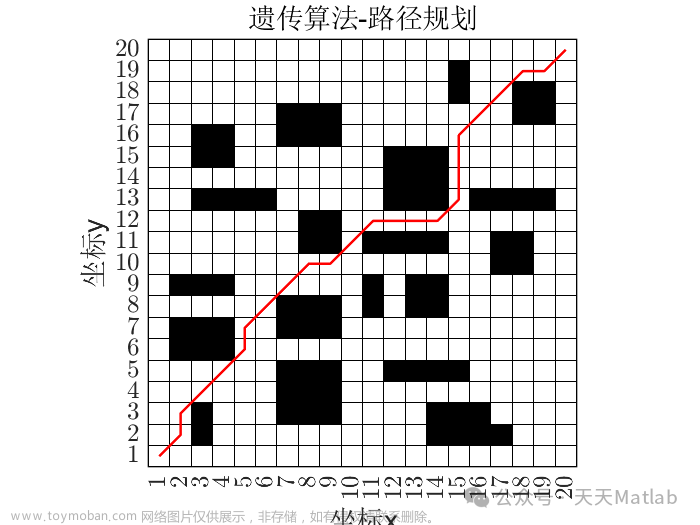
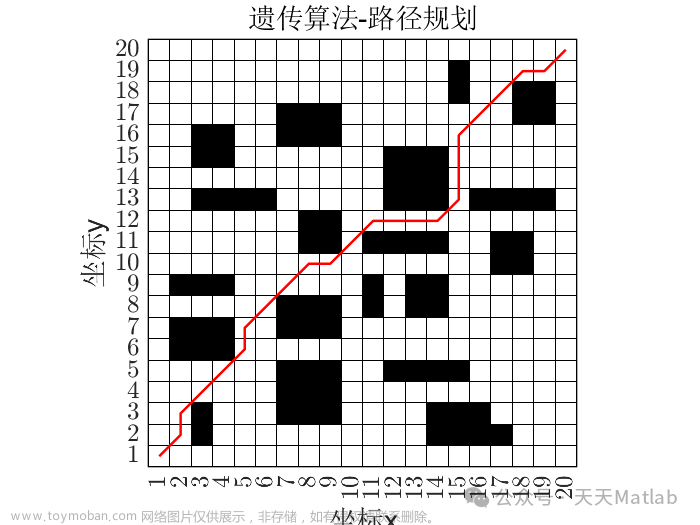
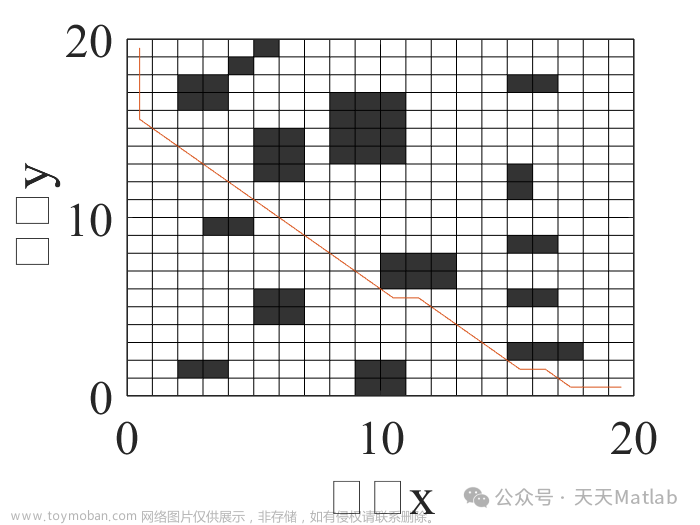
在机器人路径规划领域,寻找最短路径是一个重要的问题。天牛须算法(Antler Algorithm)是一种基于生物学天牛行为的启发式算法,可以用于栅格地图中的机器人最短路径规划。本文将介绍如何使用Matlab实现天牛须算法,并在栅格地图上找到机器人的最短路径。
首先,我们需要定义问题的输入和输出。输入包括栅格地图、机器人的起始位置和目标位置,输出是机器人的最短路径。
接下来,我们可以按照以下步骤实现天牛须算法:
-
创建栅格地图
在Matlab中,我们可以使用矩阵来表示栅格地图。其中,障碍物可以用1表示,可通过的路径可以用0表示。根据实际情况,我们可以手动创建或者从文件中读取栅格地图。 -
初始化天牛须
天牛须是算法中的基本单元,代表天牛的行走路径。我们可以将天牛须定义为一个矩阵,其中每个元素表示一个栅格地图的位置。初始时,我们可以将天牛须放置在机器人的起始位置。 -
运行天牛须算法
在每一次迭代中,天牛须会根据一定的策略选择下一个位置。具体来说,我们可以采用以下步骤:- 计算当前位置的邻居节点。邻居节点是指当前位置周围可到达的位置。
- 根据某种选择策略(如随机选择或者启发式选择)选择下一个位置。
- 更新天牛须,将新的位置添加到天牛须的结尾。
通过多次迭代,天牛须会逐渐扩展到整个栅格地图。当天牛须到达目标位置时,算法终止。
-
提取最短路径
一旦天牛须到达目标位置,我们可以从天牛须中提取出机器人的最短路径。最短路径是从起始位置到目标位置的一条连续路径。文章来源:https://www.toymoban.com/news/detail-728486.html
下面是一个示例的Matlab代码实现:文章来源地址https://www.toymoban.com/news/detail-728486.html
到了这里,关于基于Matlab的天牛须算法在栅格地图中的机器人最短路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!