1.RTC的简介
1.什么是实时时钟(RTC)
(rtc for real time clock)
(1)时间点和时间段的概念区分
(2)单片机为什么需要时间点【一定的时间点干什么事情】
(3)RTC如何存在于系统中(单片机内部集成 or 单片机外部扩展【DS1302】)
2.DS1302
1.数据手册
DS1302中文数据手册 - 豆丁网

2.SPI数字接口访问
SPI通信协议【DS1302也使用这个协议】,两个芯片之间的通信

3.内部存着一个时间点(年月日时分秒星期几)信息,可以读写,上电自动走表
3.RTC学习关键点
1.SPI接口的特征

(1)3线(SCLK,RST,IO)或者4线(SCLK,RST,I,O)
(2)同步:SPI是同步通信(表示主机【产生CLK】和从机【接受CLK】使用同一个SCLK)【同步通信有SCLK,异步没有SCLK】
(3)主从:有主机和从机
(4)串行:数据都从一根线进出【数据都是从IO进出】
2.时序的理解
3.编程实现
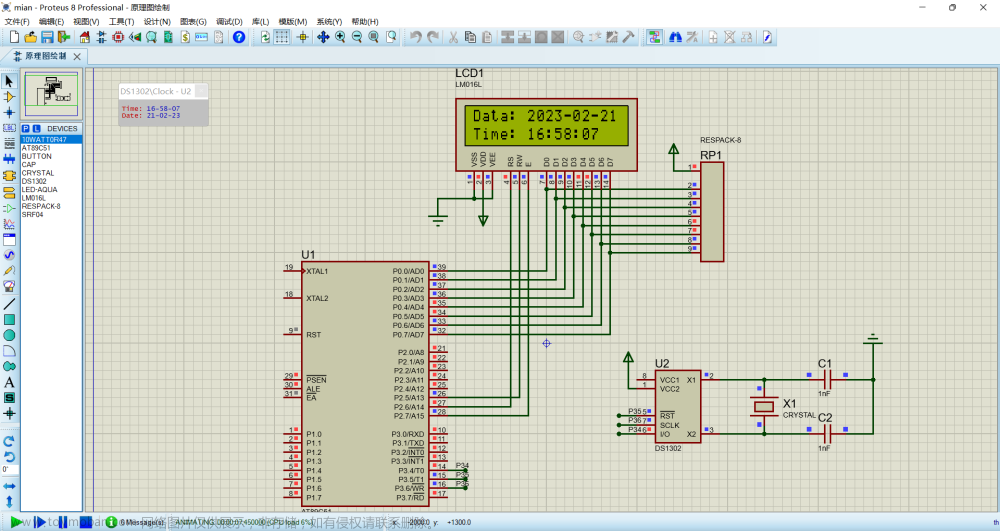
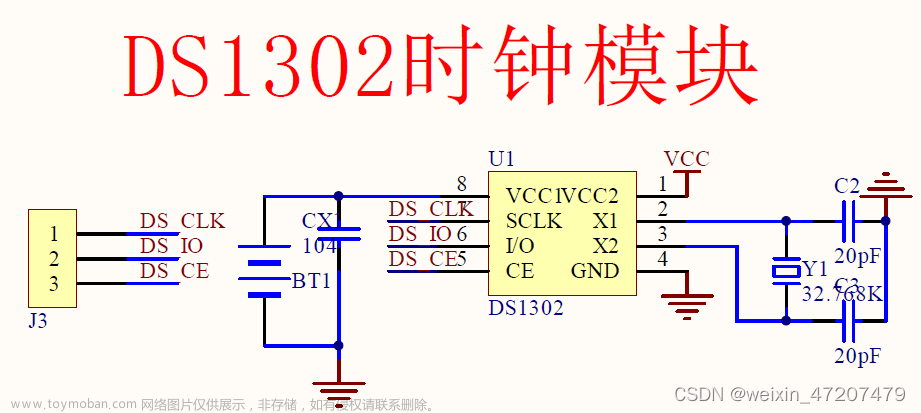
2.原理图和接线
1.原理图分析
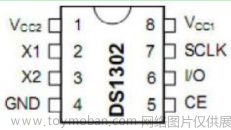
(1)DS1302引脚介绍
JP595断开,是为了让P3.4在控制DS1302的时候,不影响74HC595工作
JP1302接上,是为了让P3.4能控制到DS1302
J11断开,是为了让P3.5在控制DS1302的时候,不影响NE555模块工作
2.接线

(1)详解接线设置的原理和必要性
正常的产品一般不会这样设计,正常产品一般接线都是确定的,一般不会复用。
开发板来说,主要是为了学习,所以会放很多给模块,所以在这个时候GPIO就不够使用,这时候就需要复用设计。一个引脚接多个模块就会互相影响(有2种可能:一个是A模块工作时B模块莫名其妙的工作,二是有时候B模块会影响到A模块的正常工作)。对于复用引脚的情况,接线的关键是确认目标模块接线OK时还不会影响到其他模块。
3.数据手册带读
https://www.dianyuan.com/upload/community/2014/02/22/1393058389-67878.pdf
DS1302中文数据手册 - 豆丁网





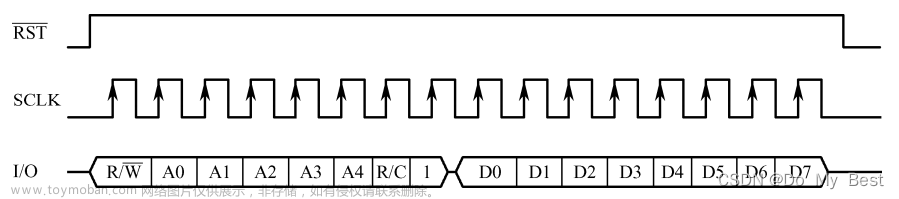
3.时序图的读法
1.时序图的关键
RST:由低电平变为高电平表示要开始工作了





(1)横轴表示时间,纵轴表示同一个时间各个通信线的状态
(2)静态或动态2个角度去看
(3)主要SCLK的边缘--->会影响IO的电平状态【如果为上升沿,代表IO端口应该在快上升沿和结束上升沿时应该保持高电平】
2.结合时序图的代码来理解时序

写入数据
/*******************************************************************************
* 函 数 名 : ds1302_write_byte
* 函数功能 : DS1302写单字节
* 输 入 : addr:地址/命令
dat:数据
* 输 出 : 无
*******************************************************************************/
void ds1302_write_byte(u8 addr,u8 dat)
{
u8 i=0;
//出于安全期间,在进入之前要将SCLK和RST进行初始化为0
DS1302_RST=0;
_nop_();
DS1302_CLK=0;//CLK低电平
_nop_();
DS1302_RST=1;//RST由低到高变化,表示要开始工作
_nop_();
//开始传送八位数据
for(i=0;i<8;i++)
{
//将数据放入IO口中
DS1302_IO=addr&0x01;//数据从低位开始传送
addr>>=1;
DS1302_CLK=1; //上升沿
//因为读取数据需要一段时间
_nop_();//delay()函数
DS1302_CLK=0;//下降沿
_nop_();
}
for(i=0;i<8;i++)//循环8次,每次写1位,先写低位再写高位
{
DS1302_IO=dat&0x01;
dat>>=1;
DS1302_CLK=1;
_nop_();
DS1302_CLK=0;
_nop_();
}
//表示时序结束了
DS1302_RST=0;//RST拉低
DS1302_CLK=0;//为下一次循环做准备
_nop_();
}
读数据
/*******************************************************************************
* 函 数 名 : ds1302_read_byte
* 函数功能 : DS1302读单字节
* 输 入 : addr:地址/命令
* 输 出 : 读取的数据
*******************************************************************************/
u8 ds1302_read_byte(u8 addr)
{
u8 i=0;
u8 temp=0;
u8 value=0;
DS1302_RST=0;
_nop_();
DS1302_CLK=0;//CLK低电平
_nop_();
DS1302_RST=1;//RST由低到高变化
_nop_();
for(i=0;i<8;i++)//循环8次,每次写1位,先写低位再写高位
{
DS1302_IO=addr&0x01;
addr>>=1;
DS1302_CLK=1;
_nop_();
DS1302_CLK=0;//CLK由低到高产生一个上升沿,从而写入数据
_nop_();
}
for(i=0;i<8;i++)//循环8次,每次读1位,先读低位再读高位
{
temp=DS1302_IO;
value=(temp<<7)|(value>>1);//先将value右移1位,然后temp左移7位,最后或运算
DS1302_CLK=1;
_nop_();
DS1302_CLK=0;
_nop_();
}
DS1302_RST=0;//RST拉低
_nop_();
DS1302_CLK=1;//对于实物中,P3.4口没有外接上拉电阻的,此处代码需要添加,使数据口有一个上升沿脉冲。
_nop_();
DS1302_IO = 0;
_nop_();
DS1302_IO = 1;
_nop_();
return value;
}3.时序之上的东西
1.大小端
一个字节发出去,先发高位还是低位【IO=addr&0x01】表示先发低位
【IO=addr&0x80】先发高位

2.如何读写寄存器
void ds1302_write_byte(u8 addr,u8 dat)
addr:寄存器的地址
dat:寄存器数据
4.SPI时序特征
1.低位在前
2.DS1302在SCLK上升沿读取,SCLK下降沿写入
上升沿:CLK=0;CLK=1;
下降沿:CLK=1;CLK=0

3.注意SCLK工作频率
延时长短,太短则单片机来不及读取
4.编程实践
1.编写ds1302_write_reg
DS1302是在上升沿读取【表示我们如果要写入数据,则应该在上升沿写入】
1)先放入数据
2)SCLK=1
3)SCLK=0

//****************************************************
//向ds1302的内部寄存器addr写入一个值value
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
void ds1302_write_reg(unsigned char addr,unsigned char value){
unsigned char i=0;
unsigned char dat;
//【第一步】起始部分 SCLK和RST为低电平,IO无所谓
SCLK=0;
delay();
RST=0;
delay();
//此时开始工作
RST=1; //SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
//【第二步】写入第一个字节,addr
for(i=0;i<8;i++){
dat=addr&0x01; //SPI是从低位开始传输,此时取出最低位
addr=addr>>1; //把addr右移一位,将原来的数值移回去
delay();
DSIO=dat; //表示将取出的二进制字符输入到IO口,把要发送的Bit数据丢到IO引脚上去准备
//一个循环写入一个字节
SCLK=1; //意味着有一个上升沿
delay();
SCLK=0; //读走之后,一个小周期就结束,把SCLK拉低,是为了下一个小周期做准备
}
//【第三步】写入第二个字节,value
for(i=0;i<8;i++){
dat=value&0x01; //SPI是从低位开始传输,此时取出最低位
value=value>>1; //把addr右移一位,将原来的数值移回去
DSIO=dat; //表示将取出的二进制字符输入到IO口,把要发送的Bit数据丢到IO引脚上去准备
delay();
//一个循环写入一个字节
SCLK=1; //意味着有一个上升沿
delay();
SCLK=0; //读走之后,一个小周期就结束,把SCLK拉低,是为了下一个小周期做准备
}
//【第四步】时序结束,IO无所谓
SCLK=0; //SCLK拉低是为了后面的周期时初始状态是正确的
delay();
RST=0;// 表示一个大周期的结束
delay();
}
2.编写ds1302_read_reg
下降沿写入【表示如果我们要读取数据,则应该在下降沿读取】
1)SCLK=1;
2)SCLC=0;
3)在将数据取出
//****************************************************
//向ds1302的内部寄存器addr读入一个值,作为返回值
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
//表示此时进入读取状态
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值【SPI下降沿才可以进行读取】
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO; //DSIO一次传输一个bit
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}3.读取时间



1.DS1302的时间寄存器的地址
如果要读取秒寄存器,地址是:0b 1000 0001(0x81)
如果要写入秒寄存器 ,地址是:0b 1000 0000(0x80)
2.移植串口输出代码,将读取到的时间通过串口输出显示
//**************************************
//定义SPI的三个引脚
sbit DSIO=P3^4;
sbit RST=P3^5;
sbit SCLK=P3^6;
//加入delay,是为了防止速度过快,单片机感受不到
void delay(){
unsigned char i;
for(i=0;i<3;i++){
}
}
//********************************************************
//因为51单片机的设计本身RAM比较少而Flash比较多,像这里定义的数组内部
//的内容是不会变的(常量数组),我们就可以使用code关键字,让编译器帮我们
//把这个数组放在flash中而不是RAM,这样做可以省一些RAM
//判断要读取时分秒年月日星期几
unsigned char code READ_RTC_ADDR[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
//存储时间
unsigned char time[7];// 用来存储读取出来的时间,格式是:秒分时日月周年
//****************************************************
//向ds1302的内部寄存器addr写入一个值value
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
void ds1302_write_reg(unsigned char addr,unsigned char value){
unsigned char i=0;
unsigned char dat;
//【第一步】起始部分 SCLK和RST为低电平,IO无所谓
SCLK=0;
delay();
RST=0;
delay();
RST=1; //SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
//【第二步】写入第一个字节,addr
for(i=0;i<8;i++){
dat=addr&0x01; //SPI是从低位开始传输,此时取出最低位
addr=addr>>1; //把addr右移一位,将原来的数值移回去
delay();
DSIO=dat; //表示将取出的二进制字符输入到IO口,把要发送的Bit数据丢到IO引脚上去准备
//一个循环写入一个字节
SCLK=1; //意味着有一个上升沿
delay();
SCLK=0; //读走之后,一个小周期就结束,把SCLK拉低,是为了下一个小周期做准备
delay();
}
//【第三步】写入第二个字节,value
for(i=0;i<8;i++){
dat=value&0x01; //SPI是从低位开始传输,此时取出最低位
value=value>>1; //把addr右移一位,将原来的数值移回去
DSIO=dat; //表示将取出的二进制字符输入到IO口,把要发送的Bit数据丢到IO引脚上去准备
delay();
//一个循环写入一个字节
SCLK=1; //意味着有一个上升沿
delay();
SCLK=0; //读走之后,一个小周期就结束,把SCLK拉低,是为了下一个小周期做准备
}
//【第四步】时序结束,IO无所谓
SCLK=0; //SCLK拉低是为了后面的周期时初始状态是正确的
delay();
RST=0;// 表示一个大周期的结束
delay();
}
//****************************************************
//向ds1302的内部寄存器addr读入一个值,作为返回值
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0; //因为51单片机不允许DSIO进行移位,所以使用中间变量
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值【SPI下降沿才可以进行读取】
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO;
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}
//******************************************************
//读取时间
void ds1302_read_time(void){
unsigned char i=0;
for(i=0;i<7;i++){
time[i]=ds1302_read_reg(READ_RTC_ADDR[i]);
}
}
void main(){
ds1302_read_time();
}5.使用串口进行调试
1.注意波特率设置和晶振设置
2.注意串口相关的接线设置
3.测试串口输出效果
4.注意二进制显示和文本方式显示
5.注意串口助手打开时烧录软件是不能使用的

1.将读取到的时间输出到串口上
//*************************************************************
//通过串口将7个时间以二进制的方式输出到串口助手上
void debug_print_time(void)
{
unsigned char i=0;
while(1){
//1.从ds1302读取时间
ds1302_read_time();
//2.for循环内打印一组7个时间
for(i=0;i<7;i++){
uart_send_byte(i);
}
//3.延时900ms后在继续下一个周期
Delay900000us();
}
}
//串口发送函数,发送一个字节【单个字节】
void uart_send_byte(unsigned char c){
//【第一步】发送一个字节
SBUF=c;
//【第二步】先确认串口发送部分没有在忙
while(!TI);//TI=0,表示在忙
//【第三步】软件复位TI标志位---数据手册要求的
TI=0;
}
void Delay900000us() //@12.000MHz
{
unsigned char i, j, k;
_nop_();
_nop_();
i = 42;
j = 10;
k = 168;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
//****************************************************
//向ds1302的内部寄存器addr读入一个值,作为返回值
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值【SPI下降沿才可以进行读取】
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO;
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}2.问题解决

状况:
(1)代码确实得到了一系列的时间数据
(2)秒确实在变化,而且规律正确
(3)时间数据中有一些FF是不合理的,不应该出现的。
总结规律:
FF总是出现在前一个周期数字是偶数时,前一个如果是奇数则不会出现
解决方法:解决读取时间为ff
1.硬件上在IO线上设置10k的电阻做弱上拉电阻处理
2.如果没有做弱上拉,也有解决方法。在代码的读取寄存器时序之后,加一个将IO置为低电平的代码进去就可以。

//****************************************************
//向ds1302的内部寄存器addr读入一个值,作为返回值
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值【SPI下降沿才可以进行读取】
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO;
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}6.DS1302的时间格式详解
1.BCD码

上面显示的时间都是十六进制
1.什么是BCD码
(1)BCD码是一种数字编码,这种计数编码有个特点:很像十进制和十六进制的结合。看起来很像十进制(29下来是30而不是2A),BCD码实际是用十六进制来表示的。【BCD码的21其实在计算机中就是0x21】
BCD中只有0-9,而没有ABCDEF等字目。
综合来说:BCD码其实就是看起来很像十进制数的十六进制。
意思是:BCD码本质是十六进制数,但是因为它没有ABCDEF,所以看起来很像十进制数。
(2)BCD码的意义:十六进制适合计算机进行计算,十进制适合人看和理解

2.区别BCD码,16进制,10进制,三种数
C语言:十进制、BCD码互换_51CTO博客_bcd码和十进制的互相转换
2.年份从2000开始
直接读出的数+2000就是当前的年份,比如读出的BCD码是16,对应0x16,其实就表示数字16,所以读出的是2016年。
7.向DS1302写入时间
1.读时间函数
//********************************************************
//因为51单片机的设计本身RAM比较少而Flash比较多,像这里定义的数组内部
//的内容是不会变的(常量数组),我们就可以使用code关键字,让编译器帮我们
//把这个数组放在flash中而不是RAM,这样做可以省一些RAM
//判断要读取时分秒年月日星期几
unsigned char code READ_RTC_ADDR[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
//****************************************************
//向ds1302的内部寄存器addr读入一个值,作为返回值
/**
addr:内部寄存器的地址
value:内部寄存器的值
*/
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值【SPI下降沿才可以进行读取】
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO;
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}
//存储时间
unsigned char time[7];// 用来存储读取出来的时间,格式是:秒分时日月周年
//******************************************************
//读取时间
void ds1302_read_time(void){
unsigned char i=0;
for(i=0;i<7;i++){
time[i]=ds1302_read_reg(READ_RTC_ADDR[i]);
}
}
2.写时间函数
1.数组的设置
//读取时间用到的数组:因为是【读】所以最后一位是1
unsigned char code READ_RTC_ADDR[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
//写入时间用到的数组:因为是【写】所以最后一位是0,所以比READ_RTC_ADDR中的地址分别少1
unsigned char code WRITE_RTC_ADDR[7]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};
2.“写保护”设置
ds1302_write_reg(0x8E,0x00); //去掉写保护
ds1302_write_reg(0x8E,0x80);//打开写保护
ds1302_write_reg(0x8E,0x00); //去掉写保护
for(i=0;i<7;i++){
ds1302_write_reg(WRITE_RTC_ADDR[i],time[i]);
}
ds1302_write_reg(0x8E,0x80);//打开写保护

3.注意写入地址和读出地址不同
//******************************************************
//写入时间
void ds1302_write_time(void)
{
unsigned char i=0;
//准备好要写入的时间
time[0]=0x24; //对应24s
time[1]=0x39;// 对应39m
time[2]=0x11; //对应11h
time[3]=0x30; //对应30日
time[4]=0x11; //对应12月
time[5]=0x02; //对应星期二
time[6]=0x16; //对应2016年
ds1302_write_reg(0x8E,0x00); //去掉写保护
for(i=0;i<7;i++){
ds1302_write_reg(WRITE_RTC_ADDR[i],time[i]);
}
ds1302_write_reg(0x8E,0x80);//打开写保护
}8.对程序进行规整
1.如何规整
(1)多文件方式实现,意思是多个.c文件来实现
(2)多文件方式的目的是让各个功能模块分开实现,这样方便组织和查找
2.c文件和头文件
(1)c文件是c语言源文件,h文件是头文件
(2)源文件主要用来放:函数和全局变量的定义
(3)头文件主要用来存放:函数和全局变量的声明,宏定义,结构体共用体类型定义等
(4)一般是一个源文件就配一个头文件
(5)一般包含自己建立的头文件时用”“而不用<>
(6)头文件中还有固定格式文章来源:https://www.toymoban.com/news/detail-729103.html
#ifndef __UART_H__
#define __UART_H__
#endif文章来源地址https://www.toymoban.com/news/detail-729103.html
uart.h
#ifndef __UART_H__
#define __UART_H__
#include <reg51.h>
void uart_init(void);
void uart_send_byte(unsigned char c);
#endif
ds1302.h
#ifndef __DS1302_H__
#define __DS1302_H__
void delay(void);
//void delay1s(void);
void delay900ms(void);
void ds1302_write_reg(unsigned char addr, unsigned char value);
unsigned char ds1302_read_reg(unsigned char addr);
void ds1302_read_time(void);
void ds1302_write_time(void);
void debug_print_time(void);
#endif
main.c
#include "uart.h"
#include "ds1302.h"
void main(void)
{
// unsigned char i = 0;
uart_init();
ds1302_write_time();
/*
// 测试串口工作
for (i=0; i<255; i++)
{
uart_send_byte(i);
delay1s();
}
while (1);
*/
debug_print_time();
}ds1302.c
#include <reg51.h>
#include <intrins.h>
#include "uart.h"
#include "ds1302.h"
/************** 全局变量定义 *************************************/
// 定义SPI的三根引脚
sbit DSIO = P3^4;
sbit RST = P3^5;
sbit SCLK = P3^6;
// 因为51单片机的设计本身RAM比较少而Flash稍微多一些,像这里定义的数组内部
// 的内容是不会变的(常量数组),我们就可以使用code关键字,让编译器帮我们
// 把这个数组放在flash中而不是ram中,这样做可以省一些ram。
unsigned char code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d};
unsigned char code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
unsigned char time[7]; // 用来存储读取的时间的,格式是:秒分时日月周年
// 有用函数
void delay(void)
{
unsigned char i;
for (i=0; i<3; i++);
}
/*
void delay1s(void) //误差 0us
{
unsigned char a,c;
for(c=167;c>0;c--)
for(a=16;a>0;a--);
_nop_(); //if Keil,require use intrins.h
}
*/
void delay900ms(void) //误差 -0.000000000205us
{
unsigned char a,b,c;
for(c=127;c>0;c--)
for(b=128;b>0;b--)
for(a=24;a>0;a--);
}
// 向ds1302的内部寄存器addr写入一个值value
void ds1302_write_reg(unsigned char addr, unsigned char value)
{
unsigned char i = 0;
unsigned char dat = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入第1字节,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 写入第2字节,value
for (i=0; i<8; i++)
{
dat = value & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
value = value >> 1; // 把addr右移一位
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
}
// 从ds1302的内部寄存器addr读出一个值,作为返回值
unsigned char ds1302_read_reg(unsigned char addr)
{
unsigned char i = 0;
unsigned char dat = 0; // 用来存储读取到的一字节数据的
unsigned char tmp = 0;
// 第1部分: 时序起始
SCLK = 0;
delay();
RST = 0;
delay();
RST = 1; // SCLK为低时,RST由低变高,意味着一个大的周期的开始
delay();
// 第2部分: 写入要读取的寄存器地址,addr
for (i=0; i<8; i++)
{
dat = addr & 0x01; // SPI是从低位开始传输的
DSIO = dat; // 把要发送的bit数据丢到IO引脚上去准备好
SCLK = 1; // 制造上升沿,让DS1302把IO上的值读走
delay(); // 读走之后,一个小周期就完了
SCLK = 0; // 把SCLK拉低,是为了给下一个小周期做准备
delay();
addr >>= 1; // 把addr右移一位
}
// 第3部分: 读出一字节DS1302返回给我们的值
dat = 0;
for (i=0; i<8; i++)
{
// 在前面向ds1302写入addr的最后一个bit后,ds1302就会将读取到的寄存器值
// 的第一个bit放入到IO引脚上,所以我们应该先读取IO再制造下降沿然后继续
// 读取下一个bit
tmp = DSIO;
dat |= (tmp << i); // 读出来的数值是低位在前的
SCLK = 1; // 由于上面SCLK是低,所以要先拉到高
delay();
SCLK = 0; // 拉低SCLK制造一个下降沿
delay();
}
// 第4部分: 时序结束
SCLK = 0; // SCLK拉低为了后面的周期时初始状态是对的
delay();
RST = 0; // RST拉低意味着一个大周期的结束
delay();
// 第5部分:解决读取时间是ff的问题
DSIO = 0;
return dat;
}
void ds1302_read_time(void)
{
unsigned char i = 0;
for (i=0; i<7; i++)
{
time[i] = ds1302_read_reg(READ_RTC_ADDR[i]);
}
}
void ds1302_write_time(void)
{
unsigned char i = 0;
// 准备好要写入的时间
time[0] = 0x24; // 对应 24s
time[1] = 0x39; // 对应 39m
time[2] = 0x11; // 对应 11h
time[3] = 0x06; // 对应 6日
time[4] = 0x12; // 对应 12月
time[5] = 0x02; // 对应 星期2
time[6] = 0x16; // 对应 2016年
ds1302_write_reg(0x8E, 0x00); // 去掉写保护
for (i=0; i<7; i++)
{
ds1302_write_reg(WRITE_RTC_ADDR[i], time[i]);
}
ds1302_write_reg(0x8E, 0x80); // 打开写保护
}
// 通过串口将7个时间以二进制方式输出在串口助手上
void debug_print_time(void)
{
unsigned char i = 0;
while (1)
{
// 1 从DS1302读取时间
ds1302_read_time();
// 2 for循环内打印一组7个时间
for (i=0; i<7; i++)
{
uart_send_byte(time[i]);
}
// 3 延时900ms后再继续下个周期
delay900ms();
}
}
uart.c
#include "uart.h"
// 串口设置为: 波特率9600、数据位8、停止位1、奇偶校验无
// 使用的晶振是11.0592MHz的,注意12MHz和24MHz的不行
void uart_init(void)
{
// 波特率9600
SCON = 0x50; // 串口工作在模式1(8位串口)、允许接收
PCON = 0x00; // 波特率不加倍
// 通信波特率相关的设置
TMOD = 0x20; // 设置T1为模式2
TH1 = 253;
TL1 = 253; // 8位自动重装,意思就是TH1用完了之后下一个周期TL1会
// 自动重装到TH1去
TR1 = 1; // 开启T1让它开始工作
ES = 1;
EA = 1;
}
// 通过串口发送1个字节出去
void uart_send_byte(unsigned char c)
{
// 第1步,发送一个字节
SBUF = c;
// 第2步,先确认串口发送部分没有在忙
while (!TI);
// 第3步,软件复位TI标志位
TI = 0;
}
到了这里,关于【单片机】13-实时时钟DS1302的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!