Redis 字典
基本语法
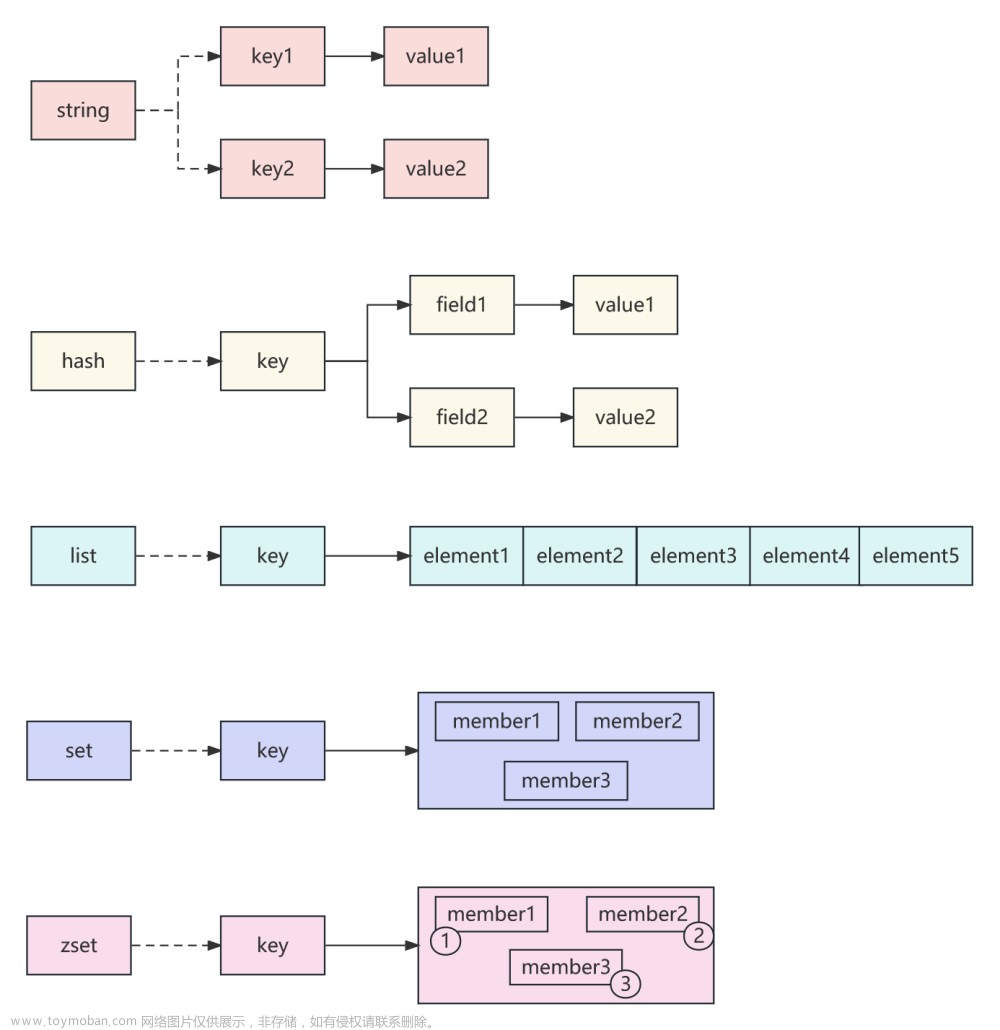
字典是Redis中的一种数据结构,底层使用哈希表实现,一个哈希表中可以存储多个键值对,它的语法如下,其中KEY为键,field和value为值(也是一个键值对):
HSET key field value
根据Key和field获取value:
HGET key field
哈希表
数据结构
dictht
dictht是哈希表的数据结构定义:
- table:哈希表数组,数组中的元素是dictEntry类型的
- size:哈希表数组的大小
- sizemask:哈希表大小掩码,一般等于size-1
- used:已有节点的数量(存储键值对的数量)
typedef struct dictht {
dictEntry **table;
unsigned long size;
unsigned long sizemask;
unsigned long used;
} dictht;

dictEntry
dictEntry是哈希表节点的结构定义:
- key:键值对中的键
- v:键值对中的值
- next:由于会出现哈希冲突,所以next是指向下一个节点的指针
typedef struct dictEntry {
void *key; // 键
union {
void *val;
uint64_t u64;
int64_t s64;
double d;
} v; // 值
struct dictEntry *next; // 指向下一个节点的指针
} dictEntry;

dict
dict是Redis中字典的结构定义:
- type:指向dictType的指针
- privdata
- ht[2]:一个dictht类型的数组,数组大小为2,保存了两个哈希表,rehash时使用
- rehashidx:记录了当前rehash的进度
- pauserehash:rehash暂停标记,大于0表示没有进行rehash
typedef struct dict {
dictType *type; //
void *privdata; // 私有数据
dictht ht[2]; // 保存了两个哈希表
long rehashidx; // rehash的进度标记
int16_t pauserehash;
} dict;
typedef struct dictType {
uint64_t (*hashFunction)(const void *key);
void *(*keyDup)(void *privdata, const void *key);
void *(*valDup)(void *privdata, const void *obj);
int (*keyCompare)(void *privdata, const void *key1, const void *key2);
void (*keyDestructor)(void *privdata, void *key);
void (*valDestructor)(void *privdata, void *obj);
int (*expandAllowed)(size_t moreMem, double usedRatio);
} dictType;

哈希冲突
一个键值对放入哈希表的时候,会根据key的值,计算一个hash值,然后根据hash值与哈希表大小掩码做与运算得到一个索引值,索引值决定元素放入哪个哈希桶中(落入哈希表数组哪个索引位置处)。
// 计算hash值
hash = dictHashKey(d,key)
// 计算索引
idx = hash & d->ht[table].sizemask;
在进行哈希计算的时候,不可避免会出现哈希冲突,出现哈希冲突的时候,Redis采用链式哈希解决冲突,也就是落入同一个桶中的元素,使用链表将这些冲突的元素链起来(dictEntry中的next指针)。

rehash
由于Redis采用链式哈希解决冲突,那么在冲突频繁的场景下,链表会变得越来越长,这种情况下查找效率是比较低下的,需要遍历链表对比KEY的值来获取数据,为了处理效率低下的问题,需要对哈希表进行扩容,扩容的过程称为rehash。
在dict结构替中ht保存了两个哈希表,ht[0]用于数据正常的增删改查,ht[1]用于rehash:
(1)正常情况下,所有的增删改查操作都在ht[0]中进行;
(2)需要进行rehash时,会使用ht[1]建立新的哈希表,并将ht[0]中的数据迁移到ht[1]中;
(3)迁移完成后,ht[0]的空间被释放,然后将ht[1]地址赋给ht[0],ht[1]的大小被设为0,ht[0]重新接收正常的请求,回到了第(1)步的状态;
rehash的触发条件
/* 判断是否需要扩容 */
static int _dictExpandIfNeeded(dict *d)
{
/* 如果已经处于rehash状态中直接返回 */
if (dictIsRehashing(d)) return DICT_OK;
/* 如果ht[0]的大小为0,意味着哈希表为空,此时做初始化操作 */
if (d->ht[0].size == 0) return dictExpand(d, DICT_HT_INITIAL_SIZE);
/*如果已经存储的节点数量大于或等于哈希表数组的大小,并且跨域扩容或者(节点数量/哈希表数组大小)大于一个比例,同时根据字典的类型判断是否允许分配内存*/
if (d->ht[0].used >= d->ht[0].size &&
(dict_can_resize ||
d->ht[0].used/d->ht[0].size > dict_force_resize_ratio) &&
dictTypeExpandAllowed(d))
{
// 进行扩容
return dictExpand(d, d->ht[0].used + 1);
}
return DICT_OK;
}
/* 由于扩容需要分配内存,这里检查字典类型分配是否被允许*/
static int dictTypeExpandAllowed(dict *d) {
if (d->type->expandAllowed == NULL) return 1;
return d->type->expandAllowed(
_dictNextPower(d->ht[0].used + 1) * sizeof(dictEntry*),
(double)d->ht[0].used / d->ht[0].size);
}
d->ht[0].used/d->ht[0].size : 节点数量与哈希表数组大小的比例,称作负载因子。
dict_force_resize_ratio 的默认值是 5。
- ht[0]的大小为0,此时哈希表是空的,相当于对哈希表做一个初始化的操作。
- 如果哈希表中存储的节点数量大于或者等于哈希表数组的大小,并且哈希表可以扩容或者负载因子大于dict_force_resize_ratio(默认值为5),根据字典的类型判断允许分配内存,满足这三个条件开始扩容。
dict_can_resize
dict_can_resize用来判断哈希表是否可以扩容,有两种状态,值分别为1和0,1代表可以扩容,0代表禁用扩容:
void dictEnableResize(void) {
dict_can_resize = 1;
}
void dictDisableResize(void) {
dict_can_resize = 0;
}
updateDictResizePolicy中对dict_can_resize的状态进行了控制,当前没有RDB子进程并且也没有AOF子进程时设置dict_can_resize状态为可扩容:
void updateDictResizePolicy(void) {
// 没有RDB子进程并且也没有AOF子进程
if (server.rdb_child_pid == -1 && server.aof_child_pid == -1)
dictEnableResize(); // 启用扩容
else
dictDisableResize(); // 禁用扩容
}
扩容大小
从代码中可以看到,扩容后哈希表数组的大小为已经存储的节点数量+1:
// 进行扩容
return dictExpand(d, d->ht[0].used + 1);
一些旧版本中扩容后的大小为已存储节点数量的2倍:
dictExpand(d, d->ht[0].used*2);
渐进式hash
当哈希表存储节点内容比较多时,需要将原来的节点一个一个拷贝到新的哈希表中,此时Redis主线程无法执行其他请求,造成阻塞,影响性能,为了解决这个问题,引入了渐进式hash。
渐进式hash并不会一次把旧节点全部拷贝到新的哈希表中,而是分多次渐进式的完成拷贝,其中rehashidx记录了迁移进度,每一次迁移的过程中会更新rehashidx的值,下一次进行数据迁移的时候,从rehashidx的位置开始迁移,在dictRehash中可以看到迁移的处理:
- 方法传入了一个参数n,代表本次需要迁移几个哈希桶
- 根据需要迁移哈希桶的数量,循环处理每一个哈希桶:
- 如果当前哈希桶中为空,继续下一个桶的处理rehashidx++
- 如果当前哈希桶不为空,将当前桶中的所有节点迁移到新的哈希表中,然后更新rehashidx的值继续处理下一个桶
- 如果已经处理够了n个桶,或者哈希表的所有数据已经迁移完毕,则结束迁移。
int dictRehash(dict *d, int n) {
int empty_visits = n*10; /* Max number of empty buckets to visit. */
if (!dictIsRehashing(d)) return 0;
// 循环处理每一个哈希桶,n为需要迁移哈希桶的数量
while(n-- && d->ht[0].used != 0) {
dictEntry *de, *nextde;
assert(d->ht[0].size > (unsigned long)d->rehashidx);
// 如果当前哈希桶没有存储数据
while(d->ht[0].table[d->rehashidx] == NULL) {
// rehashidx的值是哈希表数组的某个索引值(指向了某个哈希桶),意味着当前迁移到数组的哪个索引位置处
d->rehashidx++; // 继续下一个桶
if (--empty_visits == 0) return 1;
}
de = d->ht[0].table[d->rehashidx];
// 如果当前的哈希桶中存储着数据,将哈希桶存储的所有数据迁移到新的哈希表中
while(de) {
uint64_t h;
nextde = de->next;
/* Get the index in the new hash table */
h = dictHashKey(d, de->key) & d->ht[1].sizemask;
de->next = d->ht[1].table[h];
d->ht[1].table[h] = de;
d->ht[0].used--;
d->ht[1].used++;
de = nextde;
}
d->ht[0].table[d->rehashidx] = NULL;
// rehashidx,继续迁移下一个哈希桶
d->rehashidx++;
}
/* 判断ht[0]的节点是否迁移完成 */
if (d->ht[0].used == 0) {
// 释放ht[0]的空间
zfree(d->ht[0].table);
// 将ht[0]指向ht[1]
d->ht[0] = d->ht[1];
// 重置ht[1]的大小为0
_dictReset(&d->ht[1]);
// 设置rehashidx,-1代表rehash结束
d->rehashidx = -1;
return 0;
}
/* More to rehash... */
return 1;
}
_dictRehashStep
_dictRehashStep中可以看到调用dictRehash时,每次迁移哈希桶的数量为1:
static void _dictRehashStep(dict *d) {
if (d->pauserehash == 0) dictRehash(d,1);
}
总结
-
Redis字典底层使用哈希表实现。
-
键值对放入哈希表的时候,会根据key的值,计算hash值,出现哈希冲突的时候,Redis采用链式哈希解决冲突,使用链表将这些冲突的元素链起来。
-
由于Redis采用链式哈希解决冲突,那么在冲突频繁的场景下,链表会变得越来越长,这种情况下查找效率是比较低下的,需要遍历链表对比KEY的值来获取数据,为了处理效率低下的问题,需要对哈希表进行扩容,扩容的过程称为rehash。
-
当哈希表存储节点内容比较多时,进行rehas的时候主线程无法执行其他请求,造成阻塞,影响性能,所以采用了渐进式hash,渐进式hash并不会一次把旧节点全部拷贝到新的哈希表中,而是分多次渐进式的完成拷贝。
参考
黄健宏《Redis设计与实现》
极客时间 - Redis源码剖析与实战(蒋德钧)
美团针对Redis Rehash机制的探索和实践文章来源:https://www.toymoban.com/news/detail-729191.html
Redis版本:redis-6.2.5文章来源地址https://www.toymoban.com/news/detail-729191.html
到了这里,关于【Redis】基础数据结构-字典的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!