🔆 文章首发于我的个人博客:欢迎大佬们来逛逛
数学建模:线性与非线性优化算法
优化算法是指在满足一定条件下,在众多方案中或者参数中最优方案,或者参数值,以使得某个或者多个功能指标达到最优,或使得系统的某些性能指标达到最大值或者最小值
优化的两个关键点:
1.明确优化的目标函数
2.明确优化变量之间需要满足的约束
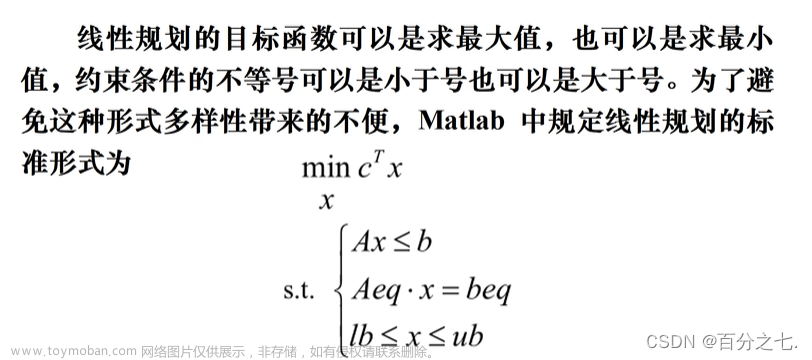
线性优化
使用函数:linprog
函数原型:
[x,fval]=linprog(f,A,b,Aeq,Beq,LB,UB)
- x:求得最优情况下变量的解
- fval:求得最优目标值
- f:目标函数的系数(符号按最小值标准,若目标是求解机大值可以通过添加负号改成求极小值)
- A:不等式约束的变量系数(符合按小于标准,如果是大于约束可通过加负号变成小于)
- b:不等式约束的常量
- Aeq:等式约束的变量系数
- Beq:等式约束的常量
- LB:变量的下限
- UB:变量的上限
例如我们需要计算求解如下线性函数的最优解:
m i n { − x 1 − 2 x 2 + 3 x 3 } x 1 + x 2 ⩾ 3 x 2 + x 3 ⩾ 3 x 1 + x 3 = 4 0 ≤ x 1 , x 2 , x 3 ≤ 2 \begin{gathered}min\{-x_1-2x_2+3x_3\} \\x_1+x_2\geqslant3 \\x_2+x_3\geqslant3 \\x_1+x_3=4 \\0\leq x_1,x_2,x_3\leq2 \end{gathered} min{−x1−2x2+3x3}x1+x2⩾3x2+x3⩾3x1+x3=40≤x1,x2,x3≤2
clc;clear;
f = [-1;-2;3];
%% 不等式约束
A = [-1,-1,0;0,-1,-1];
B = [-3,-3];
%% 等式约束
Aeq = [1,0,1];
Beq = [4];
%% 上下限
LB = zeros(3,1);
UB = 2*ones(3,1);
%% 线性优化
[x,fval] = linprog(f,A,B,Aeq,Beq,LB,UB);
%% 输出结果
objstr = ['目标函数最优值:',num2str(fval)];
disp(objstr);
for i = 1:length(x)
xstr = ['x',num2str(i),'的系数为: ',num2str(x(i))];
disp(xstr);
end
非线性优化
fmincon是MATLAB的非线性规划求解函数文章来源:https://www.toymoban.com/news/detail-729762.html
[x,fval]=fmincon(fun,x0,A,b,Aeq,Beq,LB,UB,nonlcon)
- x:求得最优情况下变量的解
- fval:求得最优目标值
- fun:目标函数(符号按最小值标准,若目标是求解机大值可以通过添加负号改成求极小值)
- x0:初始解
- A:不等式约束的变量系数(符合按小于标准,如果是大于约束可通过加负号变成小于)
- b:不等式约束的常量
- Aeq:等式约束的变量系数
- Beq:等式约束的常量
- LB:变量的下限
- UB:变量的上限
- nonlcon :非线性约束函数表达式
m a x { x 1 2 − x 2 2 + x 2 x 3 } 2 x 1 + x 2 + 3 x 3 ≤ 6 x 1 2 + x 1 x 2 + x 2 x 3 ≤ x 2 + 6 0 ≤ x 1 , x 2 , x 3 ≤ 1 \begin{gathered}max\begin{Bmatrix}x_1^2-x_2^2+x_2x_3\end{Bmatrix} \\2x_1+x_2+3x_3\leq6 \\x_1^2+x_1x_2+x_2x_3\leq x_2+6 \\0\leq x_1,x_2,x_3\leq1 \end{gathered} max{x12−x22+x2x3}2x1+x2+3x3≤6x12+x1x2+x2x3≤x2+60≤x1,x2,x3≤1文章来源地址https://www.toymoban.com/news/detail-729762.html
clc;clear;
% 指定初始解
x0 = zeros(3,1);
%% <线性>不等约束
A = [2,1,3];
B = [6];
%% <线性>等式约束
Aeq = [];
Beq = [];
%% 变量上下限
LB = zeros(3,1);
UB = 1*ones(3,1);
%% 整体非线性优化目标函数
fun = @(x) -x(1)^2-x(2)^2+x(2)*x(3);
%% 取得非线性不等式约束函数
nonlcon = @noLinearLimited;
[x,fval] = fmincon(fun,x0,A,B,Aeq,Beq,LB,UB,nonlcon);
objstr=['目标函数最优值:',num2str(-fval)];
disp(objstr)
for i=1:length(x)
xstr=['x',num2str(i),'的值为:',num2str(x(i))];
disp(xstr)
end
%% 非线性不等式约束的表达式,如果有多个,则在C后面加; 补充即可
function [C,Ceq] = noLinearLimited(x)
C = [x(1)^2+x(1)*x(2)+x(2)*x(3)-x(2)-6];
Ceq = [];
end
到了这里,关于数学建模:线性与非线性优化算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!