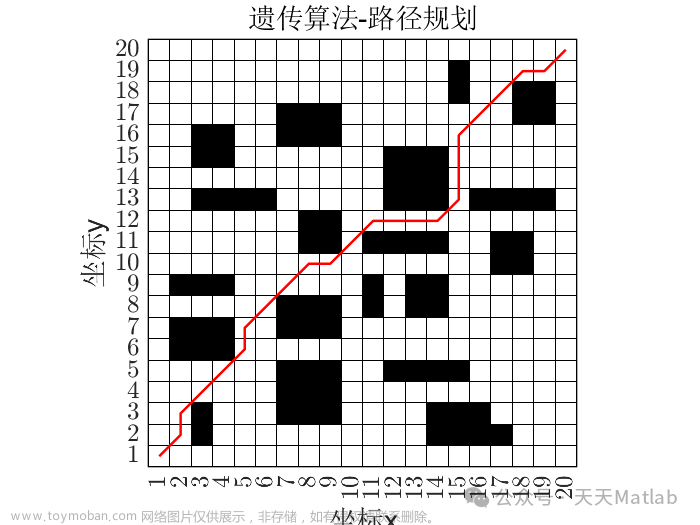
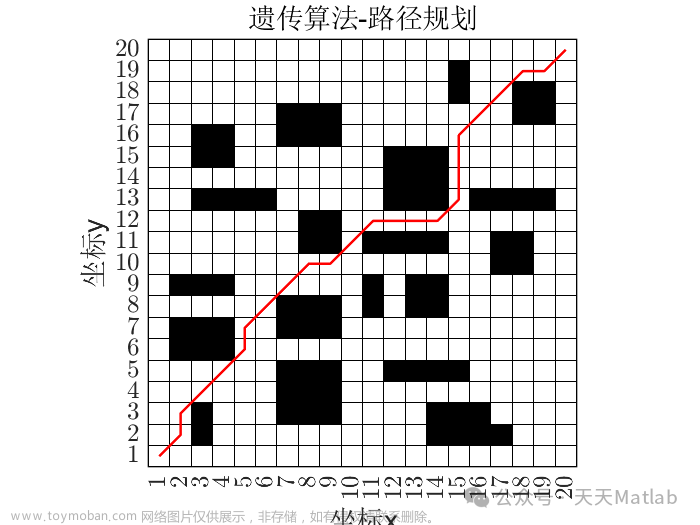
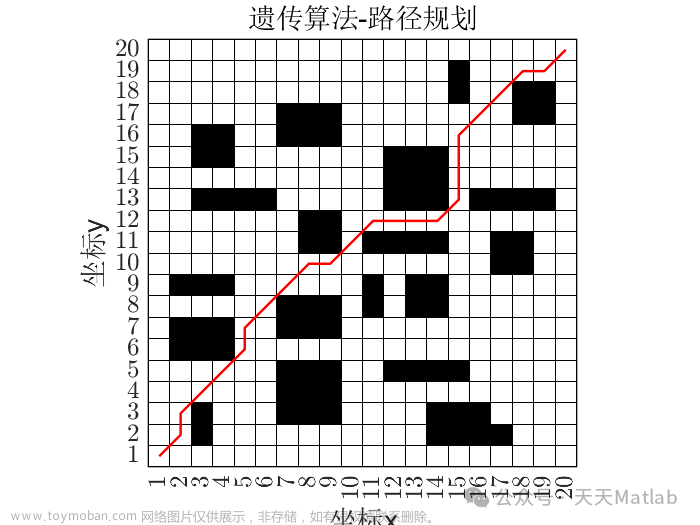
基于蚁群算法的机器人栅格地图路径规划
蚁群算法(Ant Colony Optimization, ACO)是一种模拟蚂蚁觅食行为的启发式优化算法。它常被应用于求解路径规划问题,其中包括机器人在栅格地图上寻找最佳路径的情景。在本文中,我们将介绍如何使用蚁群算法来实现机器人在栅格地图中的路径规划,并提供相应的MATLAB代码。文章来源:https://www.toymoban.com/news/detail-730701.html
- 栅格地图的表示
栅格地图可以被表示为一个二维数组,其中每个元素代表一个栅格单元。通常,栅格单元可以是空地(可通过)或障碍物(不可通过)。在MATLAB中,我们可以使用二维逻辑数组来表示栅格地图,其中1表示障碍物,0表示空地。
以下是一个示例的栅格地图:文章来源地址https://www.toymoban.com/news/detail-730701.html
gridMap = [
0 0 0 0 0 0 1 0 0 0;
到了这里,关于基于蚁群算法的机器人栅格地图路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!