目录
一、驱动程序分离的思想
二、设备树
2.1 使用设备树
三、平台总线设备驱动模板
一、驱动程序分离的思想
【IMX6ULL驱动开发学习】05.字符设备驱动开发模板(包括读写函数、poll机制、异步通知、定时器、中断、自动创建设备节点和环形缓冲区)_阿龙还在写代码的博客-CSDN博客
之前编写驱动程序的代码存在不少弊端:移植性差,驱动程序移植到别的板子上时,开发者需要修改引脚。,并且还要重新编译驱动程序或内核。为提高移植和开发效率,驱动程序分离编程的思想尤为重要。

首先我们要知道: 内核里有个结构体platform_bus_type(虚拟的总线),总线上抽象出两个链表:设备链表和驱动链表。
我们在写驱动程序时,可以构造platfrom_device结构体,然后把它添加进内核里(platform_device_register函数),就是放入platform_bus_type结构体的设备链表中。
驱动程序会调用两个函数,注册platform_device结构体和platform_driver结构体。platform_device结构体里含有硬件资源,包括寄存器地址、内存地址、中断号;platform_driver结构体里有通用的代码。 以前写驱动程序时,只写成一个.c文件,在入口函数里注册字符设备驱动程序;现在需要故意拆分成两个文件gpio_drv.c和gpio_dev.c。
在gpio_drv.c的入口函数里注册platform_driver结构体(用到platform_driver_register函数),在gpio_dev.c的入口函数里注册platform_device结构体(用到platform_device_register函数),该函数会把要注册的platform_device结构体放入内核中platform_bus_type结构体(虚拟总线)的设备链表,并且会遍历platform_bus_type结构体(虚拟总线)的驱动链表,将platform_device结构体和每一个platform_driver结构体进行比较(为硬件设备找驱动程序),匹配成功后就不会往后比较了。
如果匹配成功,会调用platform_driver结构体中的probe函数。在probe函数中完成:①从platform_device结构体中得到引脚编号 ②注册字符设备驱动程序。
如果事先添加了设备(platform_device结构体),但并没找到与之匹配的驱动程序(platform_driver结构体)。之后添加驱动时,会遍历设备链表,若匹配成功则调用驱动的probe函数。且一个驱动可能支持多个设备。
二、设备树
gpio_dev.c和设备树的目的都是为了构造platform_device结构体。如果用gpio_dev.c时需要每次都修改引脚,重新编译和安装,导致内核里有很多冗余的gpio_dev.c文件和platform_device结构体。 使用设备树:在设备树文件中添加节点信息,根据节点信息,内核会构造出platform_device结构体。
板子启动时有个uboot,uboot会做两件事:①板子上如果有SD卡,SD卡中存放有设备树dtb文件,uboot会把设备树文件读入到内存中;②SD卡中还有内核,uboot会把内核读入内存;③启动内核,uboot会把设备树的地址传入内核,内核会这个地址上把设备树文件解析成各种platform_device结构体。

以后产品修改了引脚,我们只需要修改设备树dtb文件就可以了。内核不变,变设备树文件。
2.1 使用设备树
- 修改设备树:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts
在设备树文件中添加节点信息,注意compatible与驱动的compatible匹配文章来源:https://www.toymoban.com/news/detail-731721.html
motor {
compatible = "100ask,gpiodemo";
gpios = <&gpio4 19 GPIO_ACTIVE_HIGH>,
<&gpio4 20 GPIO_ACTIVE_HIGH>,
<&gpio4 21 GPIO_ACTIVE_HIGH>,
<&gpio4 22 GPIO_ACTIVE_HIGH>;
};- 编译:make dtbs
- 复制到板子上
PC:
cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/
开发板:
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt
cp /mnt/100ask_imx6ull-14x14.dtb /boot
reboot- 测试
insmod gpio_drv.ko
./button_test /dev/gpio ...三、平台总线设备驱动模板
支持platfrom_device来自自己写的.c文件和更改的设备树文件,包括中断、定时器、读写、poll机制、异步通知。驱动程序如下:文章来源地址https://www.toymoban.com/news/detail-731721.html
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_desc{
int gpio;
int irq;
char name[128];
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc *gpios;
static int count;
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void)
{
return (r == w);
}
static int is_key_buf_full(void)
{
return (r == NEXT_POS(w));
}
static void put_key(int key)
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void)
{
int key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{
/* data ==> gpio */
// struct gpio_desc *gpio_desc = from_timer(gpio_desc, t, key_timer);
struct gpio_desc *gpio_desc = (struct gpio_desc *)data;
int val;
int key;
val = gpio_get_value(gpio_desc->gpio);
//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);
key = (gpio_desc->key) | (val<<8);
put_key(key);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}
static ssize_t gpio_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
unsigned char ker_buf[2];
int err;
if (size != 2)
return -EINVAL;
err = copy_from_user(ker_buf, buf, size);
if (ker_buf[0] >= sizeof(gpios)/sizeof(gpios[0]))
return -EINVAL;
gpio_set_value(gpios[ker_buf[0]].gpio, ker_buf[1]);
return 2;
}
static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
poll_wait(fp, &gpio_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int gpio_drv_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
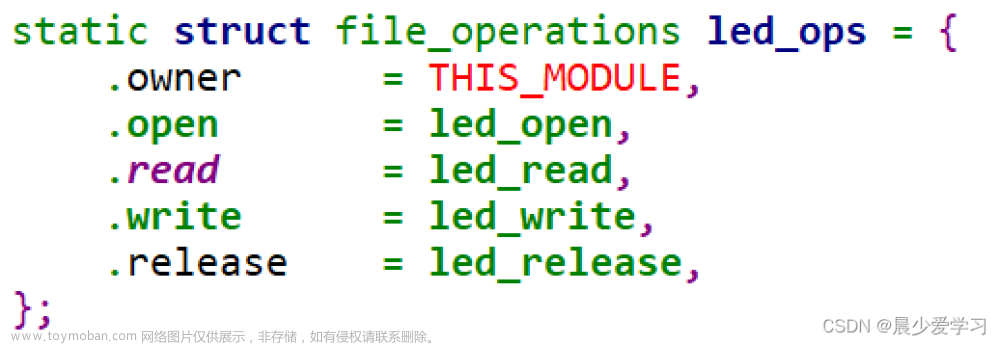
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_drv_read,
.write = gpio_drv_write,
.poll = gpio_drv_poll,
.fasync = gpio_drv_fasync,
};
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);
mod_timer(&gpio_desc->key_timer, jiffies + HZ/5);
return IRQ_HANDLED;
}
/* 在入口函数 */
static int gpio_drv_probe(struct platform_device *pdev)
{
int err = 0;
int i;
//平台设备里面有设备树节点信息
//如果平台设备platform_device来自设备树的话,np就不是NULL
struct device_node *np = pdev->dev.of_node;
//资源指针
struct resource *res;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/* 从platfrom_device获得引脚信息
* 1. pdev来自自己写的c文件
* 2. pdev来自设备树(在设备树文件中添加硬件的节点信息)
*/
if (np)
{
/* pdev来自设备树
设备树节点信息示例:
reg_usb_ltemodule: regulator@1 {
compatible = "100ask,gpiodemo";
gpios = <&gpio5 5 GPIO_ACTIVE_HIGH>, <&gpio5 3 GPIO_ACTIVE_HIGH>;
};
*/
count = of_gpio_count(np);//获得这个设备信息:多少个引脚
if (!count)
return -EINVAL;
gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);
for (i = 0; i < count; i++)
{
gpios[i].gpio = of_get_gpio(np, i);//取出这个设备的第i个引脚的引脚编号
sprintf(gpios[i].name, "%s_pin_%d", np->name, i);//给对应引脚取名字 申请gpio时需要用到名字
}
}
else
{
/* pdev来自c文件
static struct resource omap16xx_gpio3_resources[] = {
{
.start = 115,
.end = 115,
.flags = IORESOURCE_IRQ,
},
{
.start = 118,
.end = 118,
.flags = IORESOURCE_IRQ,
}, };
*/
count = 0;
while (1)
{ //获得平台设备里面的,这种IORESOURCE_IRQ类型的资源
//@dev:platform_device @type:resource type @num:resource index
res = platform_get_resource(pdev, IORESOURCE_IRQ, count);
if (res)
{
count++;
}
else
{
break;
}
}
if (!count)
return -EINVAL;
gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);
for (i = 0; i < count; i++)
{
res = platform_get_resource(pdev, IORESOURCE_IRQ, i);
gpios[i].gpio = res->start;//取出这个设备的第i个引脚的引脚编号
sprintf(gpios[i].name, "%s_pin_%d", pdev->name, i);//给对应引脚取名字 申请gpio时需要用到名字
}
}
for (i = 0; i < count; i++)
{
gpios[i].irq = gpio_to_irq(gpios[i].gpio);
setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);
//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);
gpios[i].key_timer.expires = ~0;
add_timer(&gpios[i].key_timer);
err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "100ask_gpio_key", &gpios[i]);
}
/* 注册file_operations */
major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "100ask_gpio_key_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "100ask_gpio"); /* /dev/100ask_gpio */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
//这里应该free gpio这个数组 但是没加上不知道为啥
static int gpio_drv_remove(struct platform_device *pdev)
{
int i;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "100ask_gpio_key");
for (i = 0; i < count; i++)
{
free_irq(gpios[i].irq, &gpios[i]);
del_timer(&gpios[i].key_timer);
}
return 0;
}
//支持的设备
//只要设备树节点的信息它的compatible与下面的compatible相同,
//即platfrom_device和platfrom_driver匹配成功,成功后probe函数就被调用
static const struct of_device_id gpio_dt_ids[] = {
{ .compatible = "100ask,gpiodemo", },
{ /* sentinel */ }
};
static struct platform_driver gpio_platform_driver = {
.driver = {
.name = "100ask_gpio_plat_drv",
.of_match_table = gpio_dt_ids,
},
.probe = gpio_drv_probe,
.remove = gpio_drv_remove,
};
static int __init gpio_drv_init(void)
{
/* 注册platform_driver */
return platform_driver_register(&gpio_platform_driver);
}
static void __exit gpio_drv_exit(void)
{
/* 反注册platform_driver */
platform_driver_unregister(&gpio_platform_driver);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(gpio_drv_init);
module_exit(gpio_drv_exit);
MODULE_LICENSE("GPL");
到了这里,关于【IMX6ULL驱动开发学习】07.驱动程序分离的思想之平台总线设备驱动模型和设备树的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!