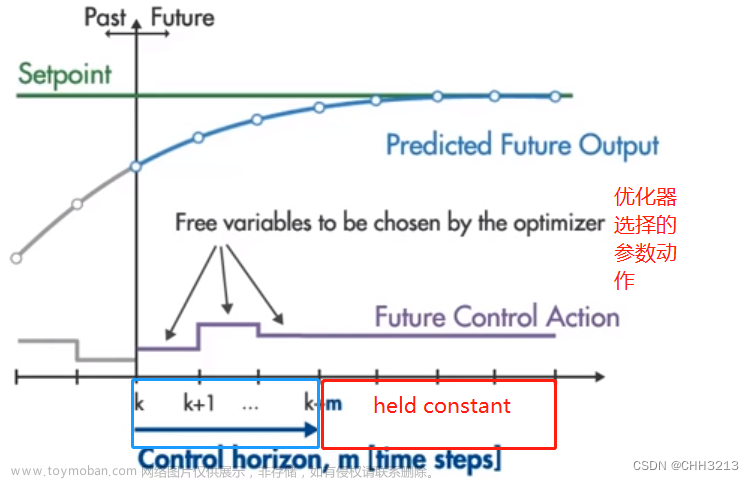
当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型无关,但是实现则与模型有关。

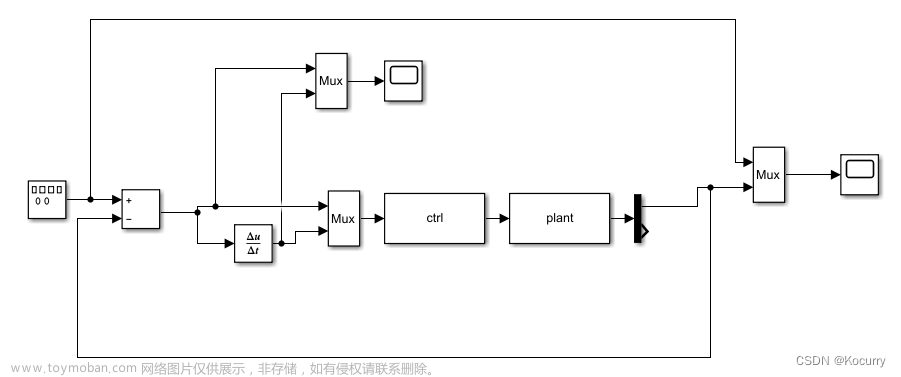
模型预测控制器使用线性对象、干扰和噪声模型来估计控制器状态并预测对象的未来输出。利用预测的目标输出,控制器求解二次规划优化问题来确定控制动作。


模型预测控制(Model Predictive Control,MPC)是一种基于数学模型的高级控制方法,用于控制动态系统。它通过使用系统模型进行预测,并优化控制输入来实现所需的控制目标。
MPC的基本思想是将控制问题转化为优化问题。它使用系统的数学模型来预测系统在未来一段时间内的行为,并根据预测结果进行优化。在每个控制时刻,MPC根据当前系统状态和目标要求,通过求解一个优化问题来计算出最优的控制输入。然后,只应用优化问题中的第一个控制输入,将其应用于系统,并将过程重复进行。
MPC的优点包括:
-
能够处理非线性系统:MPC可以应用于非线性系统,并且能够通过使用非线性模型来预测系统行为。
-
能够处理约束:MPC能够考虑系统的约束条件,例如输入限制、状态限制和目标要求,以在满足这些约束的同时实现控制目标。
-
考虑系统动态特性:MPC可以考虑系统的动态特性,通过预测未来一段时间内的系统行为,能够更好地应对系统的时变性和延迟响应。
-
可以灵活地适应不同的控制目标:通过在优化问题中引入不同的目标函数和权重,MPC可以适应不同的控制目标,并在控制过程中进行调整。
-
能够处理多变量系统:MPC可以应用于多变量系统,通过同时考虑系统的多个输出和输入,实现更精确的控制。
MPC在许多领域中得到广泛应用,包括工业过程控制、机器人控制、交通流控制、能源管理等。它通过对系统行为进行预测和优化,提供了一种灵活而高效的控制方法,能够实现更好的控制性能和系统响应。
————————————————————————————————————————
RMPC基于机器人的动力学模型和环境感知,通过预测机器人在未来一段时间内的行为来进行控制。它将机器人的状态和环境信息作为输入,并使用动力学模型来预测机器人在未来的时间内的运动轨迹。然后,通过优化控制输入来最小化预测轨迹与期望轨迹之间的误差,并在每个控制周期中更新控制策略。
RMPC的主要步骤包括:
-
状态预测:使用机器人的动力学模型和当前状态信息,预测机器人在未来一段时间内的状态轨迹。
-
优化问题:建立优化问题,将控制目标和约束条件纳入考虑。目标可能是最小化误差、最大化效能或其他性能指标。
-
优化求解:通过求解优化问题,计算出最优的控制输入序列,使得预测轨迹与期望轨迹之间的误差最小化。
-
控制策略更新:根据优化求解的结果,选择并应用最优的控制输入,将其应用于机器人系统,并在下一个控制周期中进行更新。
RMPC的优点在于它可以考虑机器人的动态特性、非线性效应和约束条件,并通过预测和优化来实现更精确的控制。它可以适应复杂任务和动态环境,提供更高的控制性能和适应性。
RMPC在许多机器人应用中得到广泛应用,如机械臂控制、移动机器人导航、人机交互和协作机器人等。它为机器人系统提供了一种高级控制方法,使机器人能够在复杂环境下完成精确的任务,并具备适应性和鲁棒性。
参考文献:文章来源:https://www.toymoban.com/news/detail-731815.html
模型预测控制(控制模式的一种)_百度百科模型预测控制(MPC)是一类特殊的控制。它的当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得。过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施第一个控制作用。这是它与那些使用预先计算控制律的算法的最大不同。本质上模型预测控制求解一个开环最优控制问题。它的思想与具体的模型无关,但是实现则与模型有关。https://baike.baidu.com/item/%E6%A8%A1%E5%9E%8B%E9%A2%84%E6%B5%8B%E6%8E%A7%E5%88%B6/8252660?fr=aladdin模型预测控制简介(model predictive control) - 知乎经常有人会问到control theory 和 optimization 有什么联系?它们之间的联系非常多,今天我们主要聚焦在模型预测控制。模型预测控制实际上是以优化方法来求解控制问题,或者说是以优化问题的求解来给出控制器的动…https://zhuanlan.zhihu.com/p/99409532模型预测控制-Introduction to Model Predictive Control - 知乎之前看到大佬De Moor Bart一个关于MPC的介绍,挺全面的,和大家分享一下,下不到slides的可以找我要。本文主要是一些概念性的基础,未涉及具体算法和前沿方法,适合对MPC有略微了解的小伙伴复习梳理。基本概念 为…https://zhuanlan.zhihu.com/p/169368155?utm_source=cn.wiz.note文章来源地址https://www.toymoban.com/news/detail-731815.html
到了这里,关于机器人模型预测控制MPC(model predictive control)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!