前言
大多数倾斜摄影都是用大疆精灵或者别的比较专业的无人机进行测量,但是我就遇到了设备受限的情况,只能用大疆御2Pro来进行测量,因为怕炸机损坏了自己要赔偿,也没有用荔枝(Litchi)等航测软件,并且没有条件来打像控点,因为没有RTK等设备,所以这次是相当于非专业的倾斜摄影建模,经过多次实验,最终的效果还是不错的,效果图如下:
一、大疆御2Pro无人机操作
本次使用的是大疆御2pro这款无人机,用的是那种带显示屏的手柄。在开始正式拍摄之前,设想了几种拍摄方案:
方案一:使用航测软件,这样只要设置区域、航向重叠率和旁向重叠率,就会自动配置航线,只要飞行就好了,比较方便也更正规,但是由于不提供大疆官方的航测软件,用其他航测软件大疆是不认可的,有炸机的风险,由于荷包不是太大,还是放弃这种方法;
方案二:手动飞行,然后手动拍摄,建模的面积太大,所以选择S型路线,由于拍摄的主要是花的种植地,想得到的模型更细致,所以选择的飞行高度比较低,大概十五米的样子,但是等到真正实施这种方案的时候,发现效果不好,手控的偶然性太高,航向重叠率和旁向重叠率太低,建成的模型反而模糊,并且由于飞行高度太低,导致效率太低了,总而言之就是这种方法,费时费力最后出来的效果还不好;
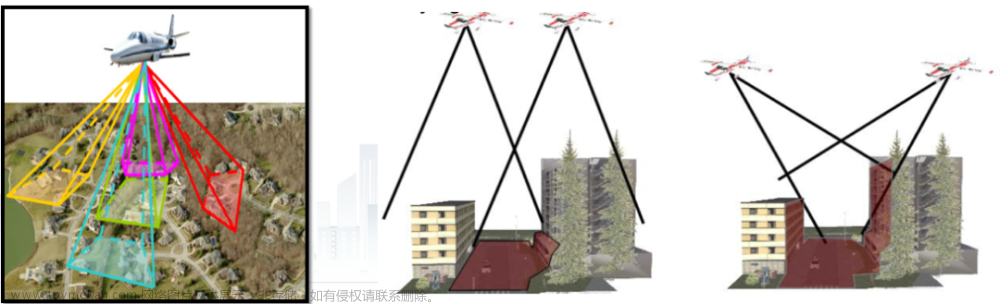
方案三:我发现大疆御2 Pro自带很多功能,其中一个绕兴趣点飞行,能自动绕某个区域或者点飞行,而且飞行高度和飞行速度都不变,大大减小了人为的误差,只需要点击拍照即可,大大减小了工作量,,但是就不是S型路线了,而是绕圈,但是只要重复度够,出来的效果也是不错的,大区域分成小区域,然后绕圈,如下图所示;(最终用了这个方案)
注:由于我是用contextCapture处理无人机拍下来的数据的,在软件中我看到还可以使用视频建模,出于好奇,我拍摄了一个视频进行了处理,处理结果是虽然模型建出来了,但是发现与实地的尺寸不太对,而且视频里面是不带经纬度的,所以用视频的这种方式不可取,但是可以通过视频和照片结合的方式,这样就有位置信息了,但由于两种格式的结合与只有照片的方式,出来的成果差不多,所以这个视频也是没有必要了;
二、contextCapture进行数据处理
contextCapture安装包:
链接:https://pan.baidu.com/s/14QQlqH0ixULDGfcHCJKbqw
提取码:y9om
点击空三角测量:
点击了submit之后一直点下一步就可以了,这里不用设置什么
设置是否切片,如果内存不够,可以进行切片设置
设置好了之后提交项目
这里设置一下要导出的模型的格式,我这里是导出osgb格式,然后一直点下一步就可以,直到设置保存路径

然后等到下面这个跑完了就可以了,跑完了之后去保存路径下去找osgb数据就可以了
最后生成,data里面就是切片的osgb模型了
三、cesium加载倾斜摄影模型
本来我想着后边直接用cesiumlab 将osgb数据转成tileset数据,然后直接加载就可以了,但是试了很多遍,转出来的tileset数据就是在cesium中显示不了,我还以为是我的代码,因为在cesiumlab中可以预览,然后我去请教了一个cesium的大佬,他说是cesiumlab的原因,让我用别的软件进行转换,我就使用了另一种插件
3dtile
链接:https://pan.baidu.com/s/1VsjRiUqV44lW-iV4AdW7HQ
提取码:sf9c
在这个页面运行cmd,然后输入
3dtile.exe -f osgb -i D:\HYX\QXSY\testproject\JDPprojection\Productions\Production_5photo2 -o D:\HYX\QXSY\成果模型\基地正式拍摄成果\3.7
回车就可以了

生成的tileset数据直接用cesium加载就可以了文章来源:https://www.toymoban.com/news/detail-732020.html
总结
本人在这之前从来没有使用过无人机,这篇文章的内容也是我一步一步试错试出来了,也不是飞无人机的专业人员,只是公司需要,所以暂时承接这项任务,所以如果有更好的建议,可以私信我,如果有错误,也可以指出来。文章来源地址https://www.toymoban.com/news/detail-732020.html
到了这里,关于非专业无人机进行倾斜摄影并且通过cesium加载的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



](https://imgs.yssmx.com/Uploads/2024/04/861235-1.png)
](https://imgs.yssmx.com/Uploads/2024/04/857850-1.png)





