A*算法在MATLAB中的应用:机器人迷宫路径规划
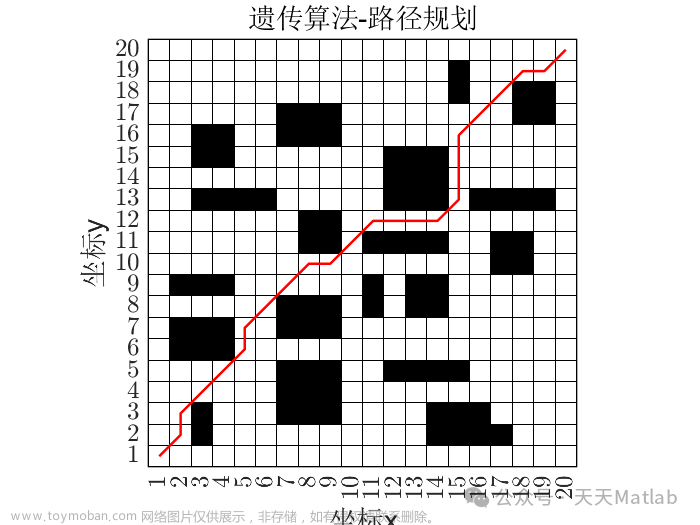
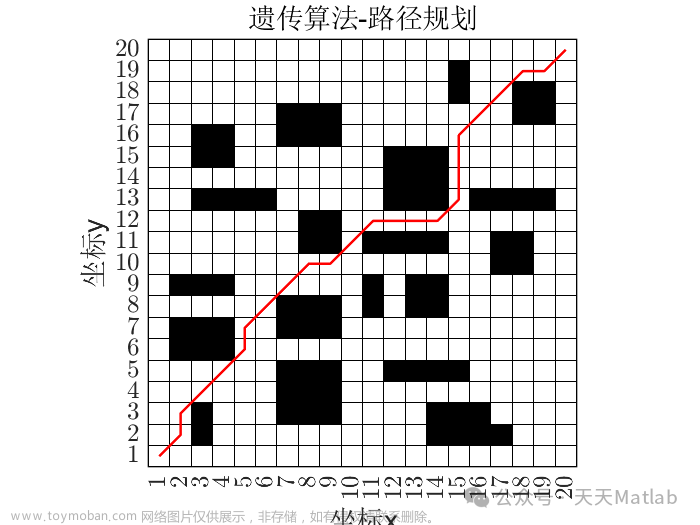
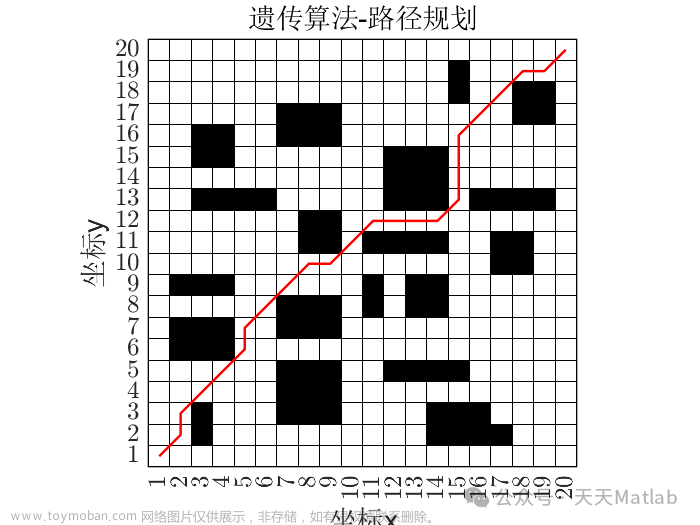
迷宫路径规划是机器人导航领域中的一个重要问题。A*(A-star)算法是一种常用的启发式搜索算法,可用于寻找最优路径。在本文中,我们将介绍如何使用MATLAB实现A*算法来解决机器人在迷宫中的路径规划问题。
首先,让我们了解一下A算法的工作原理。该算法基于图搜索的思想,通过评估当前节点到目标节点的代价估计值(启发函数),选择代价最小的节点进行扩展。A算法维护两个列表:开放列表和关闭列表。开放列表用于保存待扩展的节点,关闭列表用于保存已经扩展过的节点。算法的核心是通过计算每个节点的代价函数值(f值)来选择最优节点进行扩展。
现在,我们将使用MATLAB编写A*算法的代码来解决机器人迷宫路径规划问题。下面是代码的实现步骤:文章来源:https://www.toymoban.com/news/detail-732923.html
步骤1:定义迷宫地图
首先,我们需要定义一个迷宫地图,其中包含起始点、目标点和障碍物。我们可以使用二维数组表示迷宫地图,其中0表示可通行的空白格,1表示障碍物。文章来源地址https://www.toymoban.com/news/detail-732923.html
% 定义迷宫地图
map = [
0 0 1 0 0 到了这里,关于A*算法在MATLAB中的应用:机器人迷宫路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![【Python数据结构与算法】--- 递归算法的应用 ---[乌龟走迷宫] |人工智能|探索扫地机器人工作原理](https://imgs.yssmx.com/Uploads/2024/02/752756-1.gif)